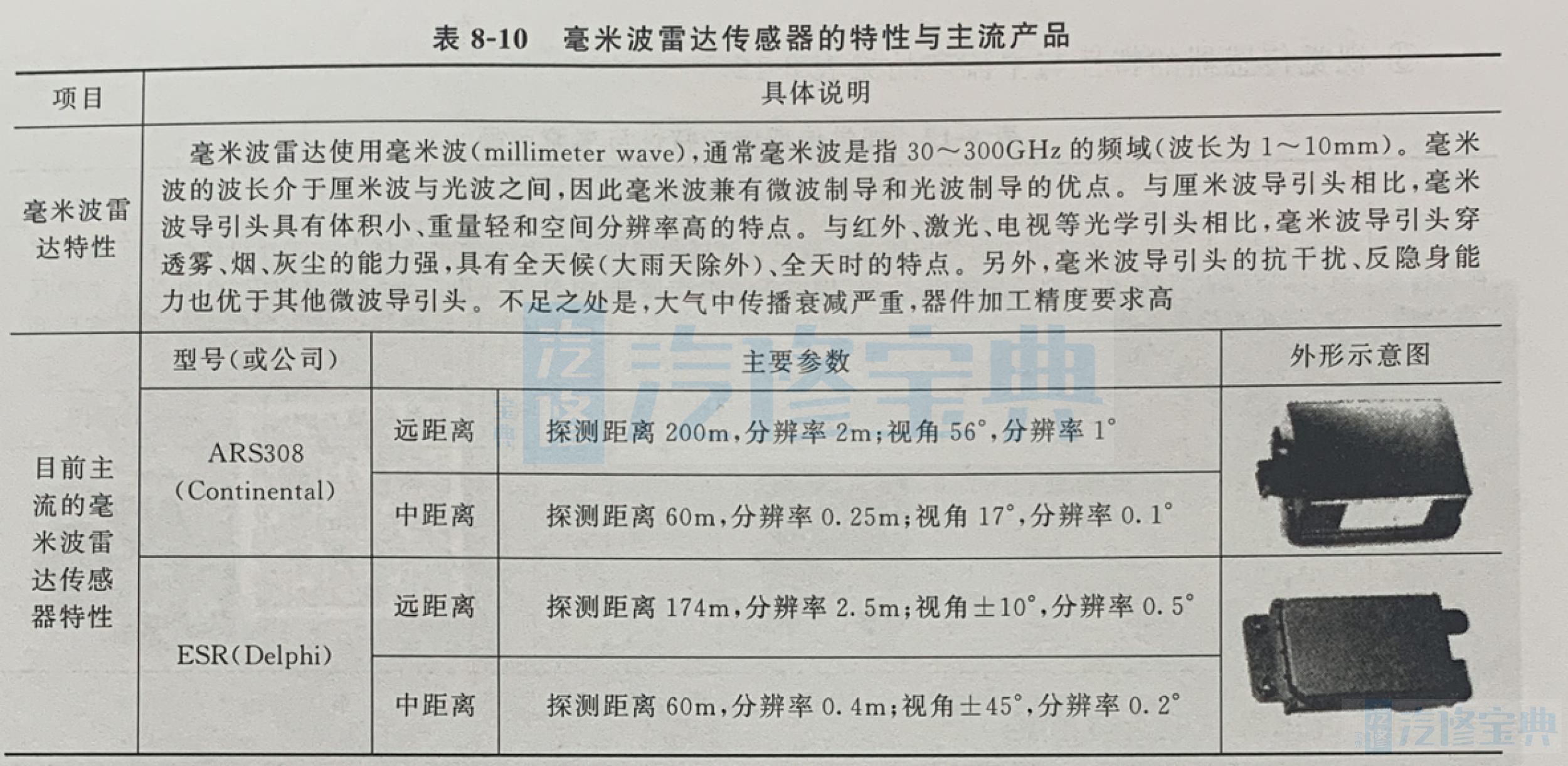
无人驾驶汽车对环境的感知多采用传感器来实现,常用环境位置感知传感器主要有毫米波雷达、微光雷达、摄像头等传感器。 ①毫米波雷达传感器的特性与主流产品见表8-10。
②激光雷达传感器的特性与主流产品见表8-11。
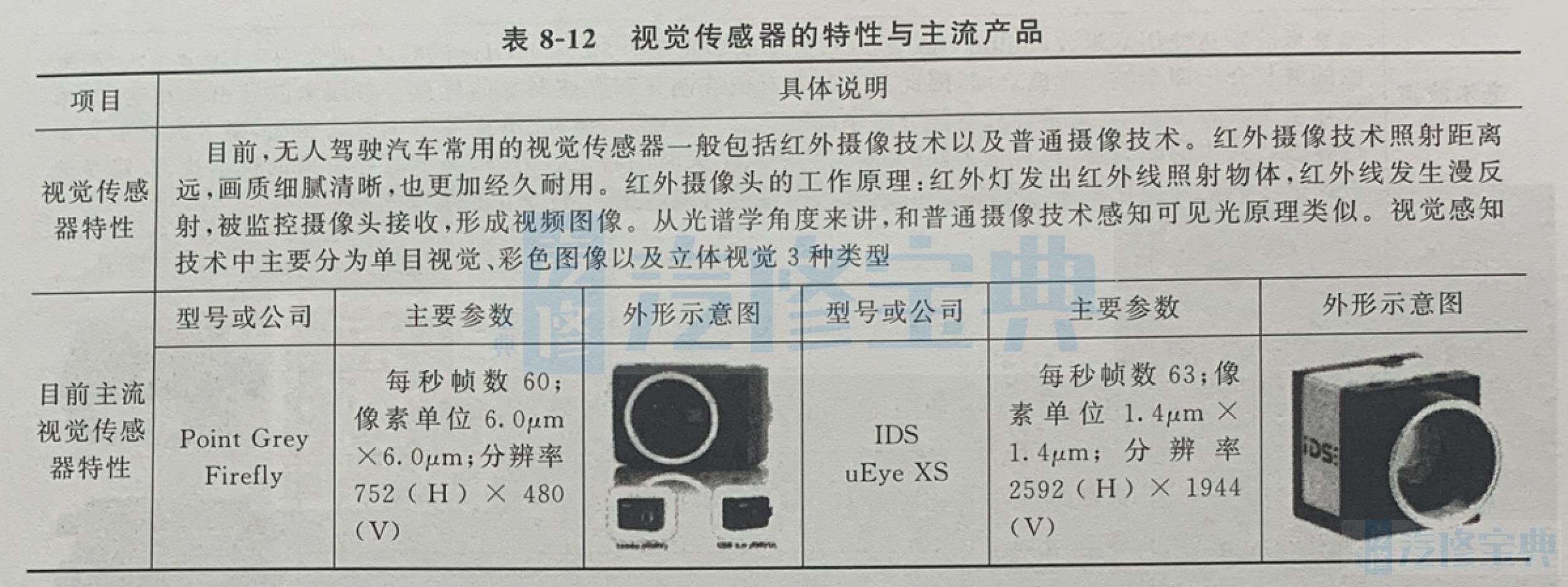
③视觉传感器的特性与主流产品见表8-12。


无人驾驶汽车对环境的感知多采用传感器来实现,常用环境位置感知传感器主要有毫米波雷达、微光雷达、摄像头等传感器。 ①毫米波雷达传感器的特性与主流产品见表8-10。
②激光雷达传感器的特性与主流产品见表8-11。
③视觉传感器的特性与主流产品见表8-12。

返回顶部