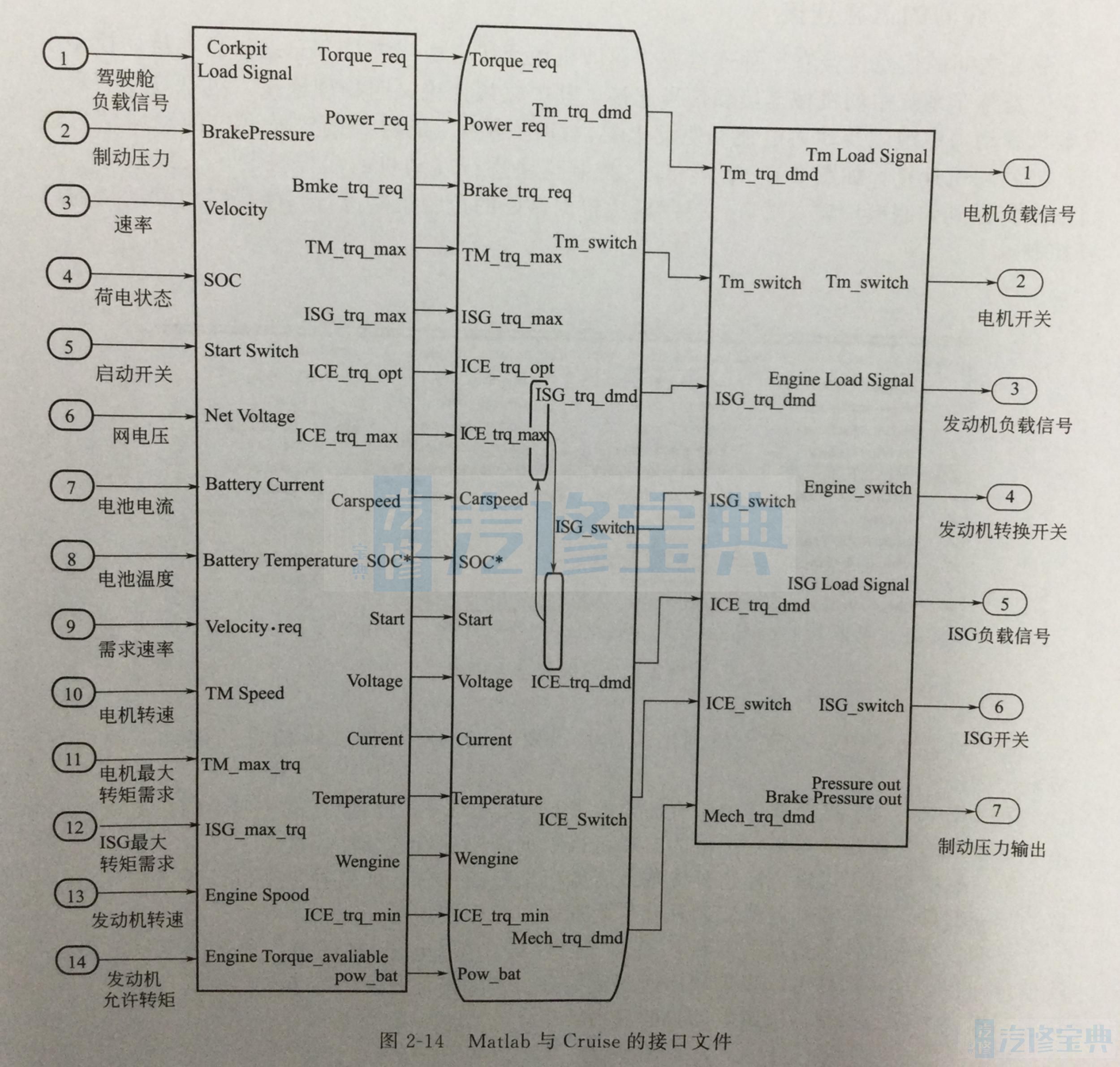
Matlab接口模块用来实现与 Cruise的联合仿真, Cruise软件与 Matlab的接口允许客户自定义模型元件以及相关的控制策略,便于客户自己进行复杂控制。 Cruise与 Matlab有三种连接方式。 (1) Cruise Interface Cruise与 Matlab的联合仿真分析( Matlab在前台,而 Cruise处在被调用状态)。 (2) Matlab API Cruise与 Matlab的联合仿真分析( Cruise在前台,而 Matlab处在被调用状态)。 (3) Matlab dll通过 Simulink模型生成的动态链接库(DLL)与 Cruise进行耦合仿真。 由于 Cruise模型是非常完整的模型,采用第三种方法,通过生成 Matlab/ Simulink的DLL文件实现与 Cruise的联合仿真,如图2-14所示。
其中第一列为整车模型中 Matlab控制模块的14个接口,实现与 Matlab的连接,以实现接口的识别,第一列为子系统参数模型,定义了从 Cruise中采集的接口参数与其他参数之间的关系。其中发动机的转矩曲线是需要从 Cruise中整车系统采集的数组模型。最右边为对应于 Cruise软件中模型参数的7个输出接口:电机负载信号、电机开关、发动机转换开关、发动机负载信号、ISG负载信号、ISG开关、制动压力输出。
发动机的 Simulink模型如图2-15所示。需要获得的信息或者输入的信息有发动机的输出转矩、发动机最大转矩、发动机最小转矩和由软件所采集监测到的发动机转矩信息。
中间部分为不同的工作模式状态转换条件 Stateflow模型,如图2-16所示。
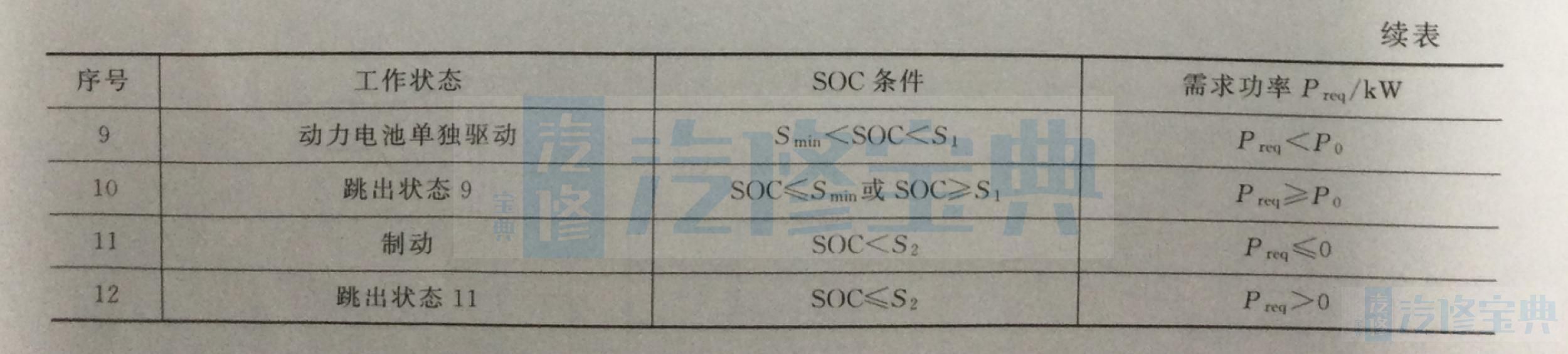
Stateflow模块由图形对象和非图形对象构成,模型中用方块表示系统的运行模式,带有方向箭头的线条表示状态转化的流向,每个运行模式状态都有执行条件和跳出条件,分别写在带箭头的线上。 Stateflow模型中的状态转化条件见表2-3,同时加入了车辆启停状态控制和制动能量回收模块。
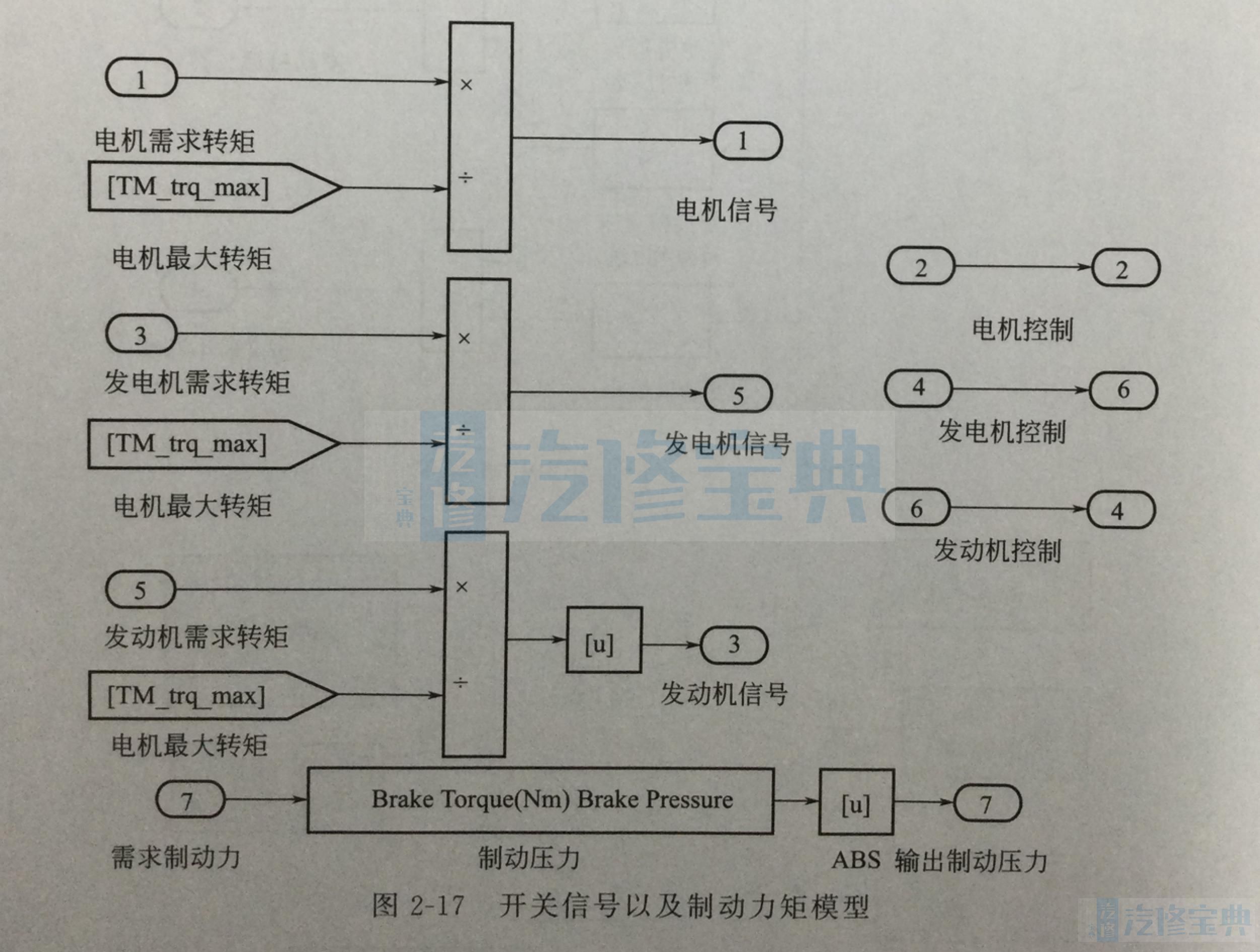
开关信号以及制动力矩模型如图2-17所示,其中制动力矩是与 Cruise中车辆模型对应的,以实现不同软件中信号的识别。