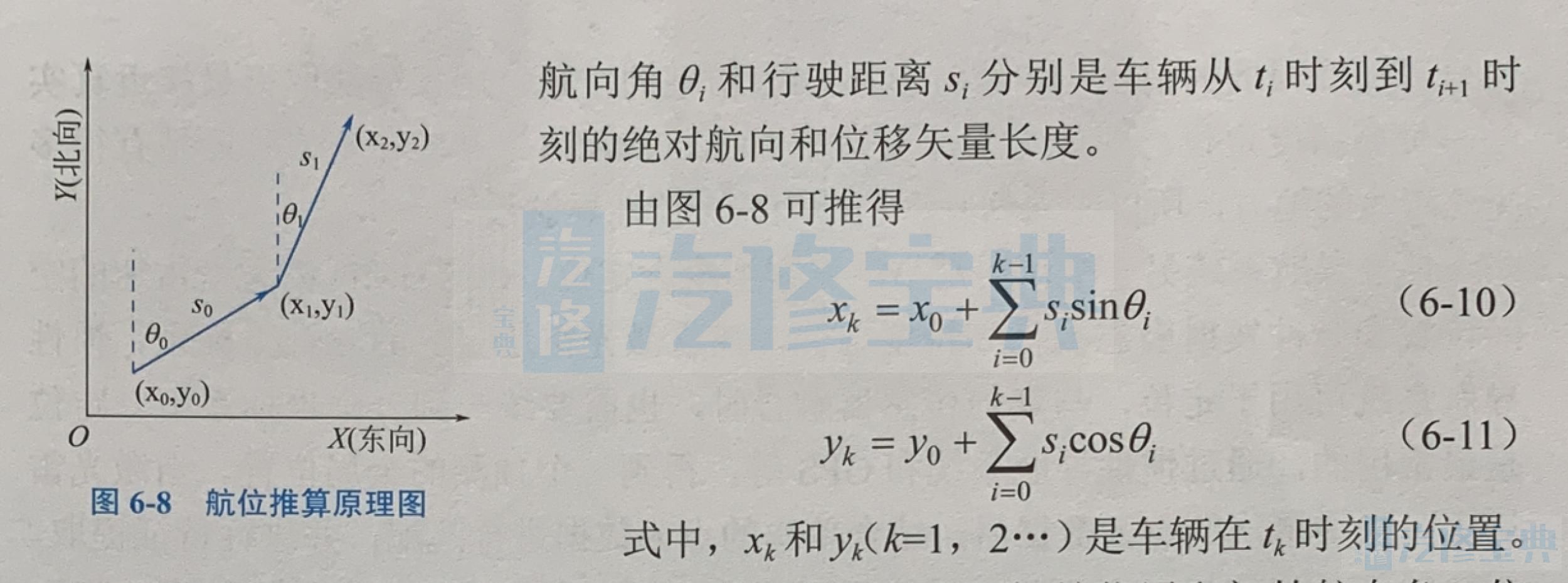
车辆航位推算( Dead Reckoning,DR)方法是一种常用的自主式车辆定位技术。相对于GPS系统,它不用发射接收信号,不受电磁波影响,机动灵活,只要车辆能达到的地方都能定位。但是由于这种定位方法的误差随时间推移而发散,所以只能在短时间内获得较高的精度,不宜长时间单独使用DR是利用载体上某一时刻的位置,根据航向和速度信息,推算得到当前时刻的位置,即根据实测的汽车行驶距离和航向计算其位置和行驶轨迹。它一般不受外界环境影响,但由于其本身误差是随时间积累的,所以单独工作时不能长时间保持高精度。 DR的主要原理是利用DR传感器测量位移矢量,从而推算车辆的位置。航位推算原理图如图6-8所示。其中,(xi,y2)(i=1,2…)是车辆在ti时刻的初始位置,
由此可见,航位推算必须通过其他手段提供车辆初始位置和初始航向角,位移和航向角的变化量要实时采样,而且采样频率要足够高,这样就可以近似认为采样周期内车辆加速度为零。航位推算的误差随距离和时间积累,不能长期单独使用,可以借助于GPS系统对其定位误差进行补偿。
由于航迹推算是一个累积的过程,因此,所有的传感器误差均会造成位置误差的累积,产生定位误差累积的原因主要有:里程计误差;角速率陀螺漂移误差航向误差。
减小航迹推算累积误差主要有以下方法。
①利用GPS精准定位信息对导航传感器的误差进行校正。
②采用卡尔曼滤波技术对陀螺仪信息进行滤波处理,减少干扰和漂移误差。