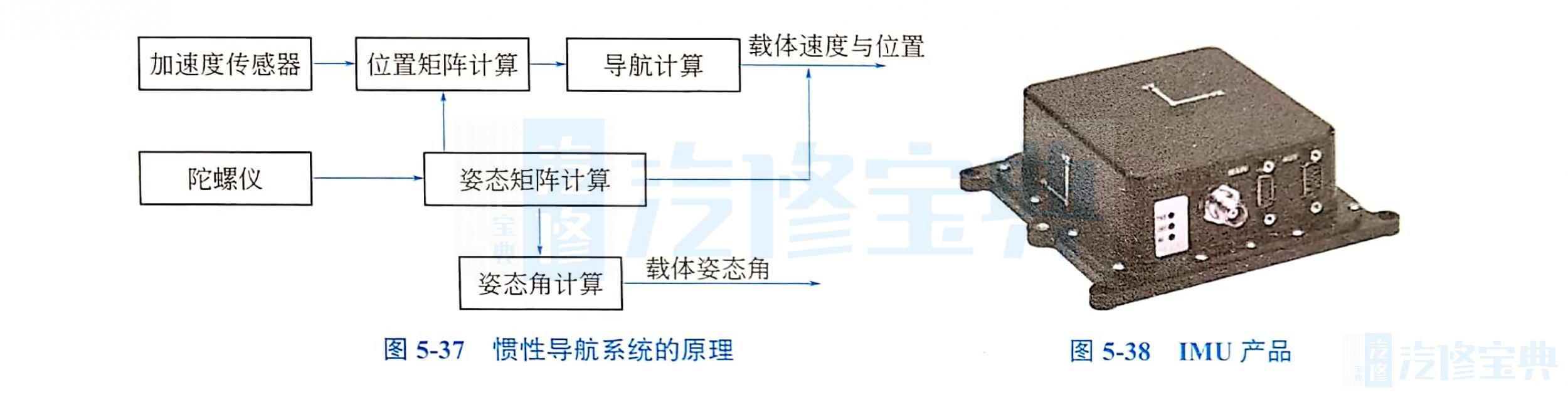
惯性导航系统(INS)是一种利用惯性传感器测量载体的角速度信息,并结合给定的初始条件实时推算速度、位置、姿态等参数的自主式导航系统。具体来说惯性导航系统属于一种推算导航方式,即从一已知点的位置根据连续测得的运动载体航向角和速度推算出其下一点的位置,因而可连续测出运动体的当前位置惯性导航系统主要采用加速度传感器和陀螺仪传感器来测量载体参数,其原理如图5-37所示。 加速度传感器和陀螺仪结合就是惯性测量单元(IMU),一个测量速度,一个测量方向。IMU的一个重要特征在于它以高频率更新,其频率可达到1000Hz,所以IMU可以提供接近实时的位置信息。 惯性导航系统可以看成是IMU与软件的结合。图5-38所示为U产品,通过内置的微处理器,能够以最高200Hz的频率输出实时的高精度三维位置、速度、姿态信息。
基于GPS或BDS和惯性传感器的融合是无人驾驶汽车一种重要的定位技术。
惯性导航系统主要有两个作用:一个是在GPS信号丢失或很弱的情况下,暂时替代GPS,用IMU进行定位:另一个作用是配合激光雷达进行精准定位。
惯性导航系统主要具有以下优点。
①由于它是不依赖于任何外部信息,也不向外部辐射能量的自主式导航系统,故隐蔽性好,也不受外界电磁干扰的影响。
②可全天候在全球任何地点工作。
③能提供位置、速度、航向和姿态角数据,所产生的导航信息连续性好而且噪声低。
④数据更新率高,短期精度和稳定性好。
惯性导航系统主要具有以下缺点。
①由于导航信息经过积分而产生,定位误差随时间而增大,长期精度差。
②每次使用之前需要较长的初始对准时间。
③不能给出时间信息。