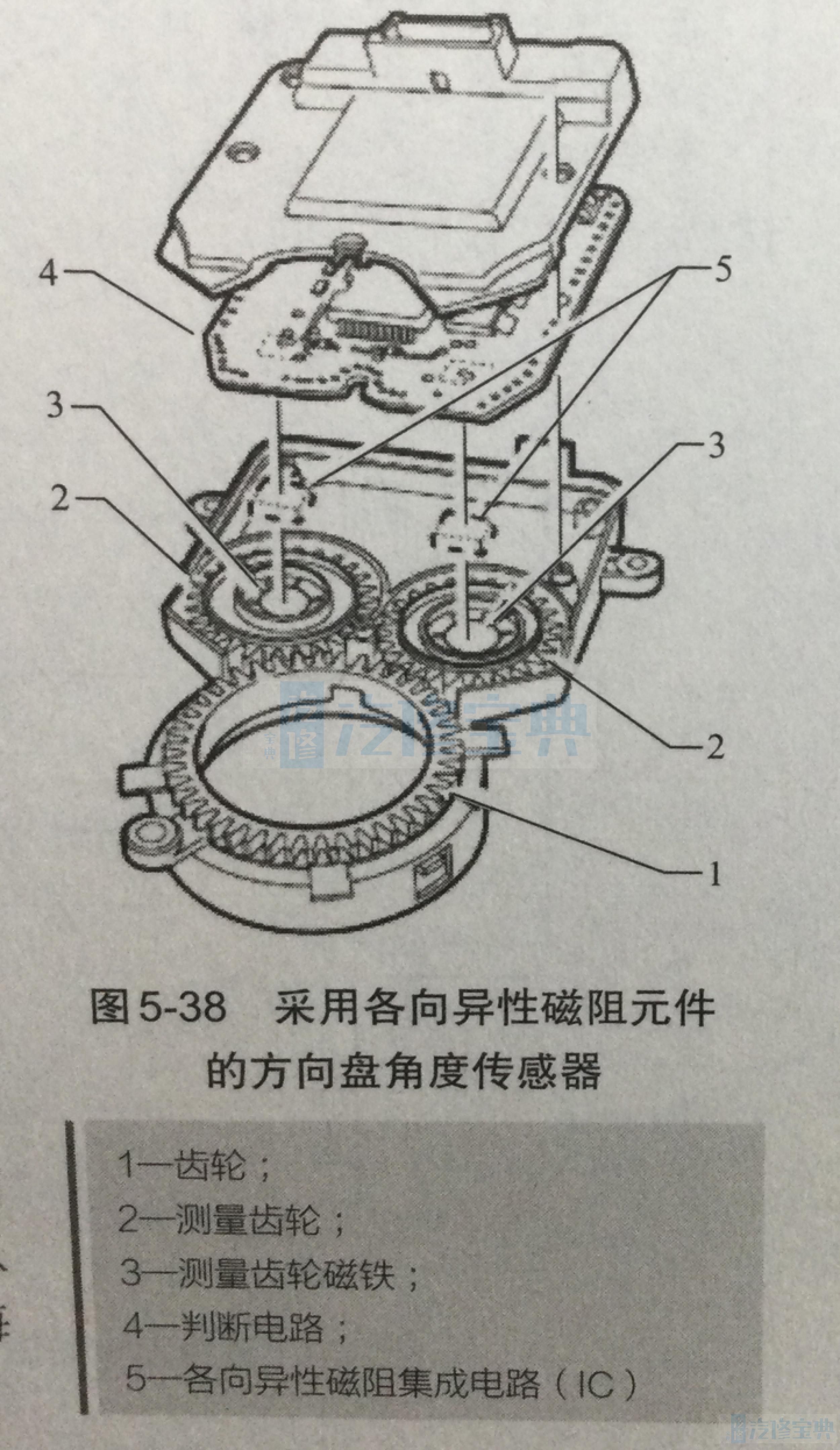
采用各向异性磁阻元件(AMR)的方向盘角度传感器如图5-38所示。 磁阻式传感器电阻随外部磁场方向而变。 通过测量两个齿轮的角度就可以得到方向盘转动四圈的角度信号。两个齿轮是由转向轴上的个齿轮驱动。两个齿轮相差一个齿,这样从两个齿轮的一对角度值就可以知道方向盘的每个可能的位置。
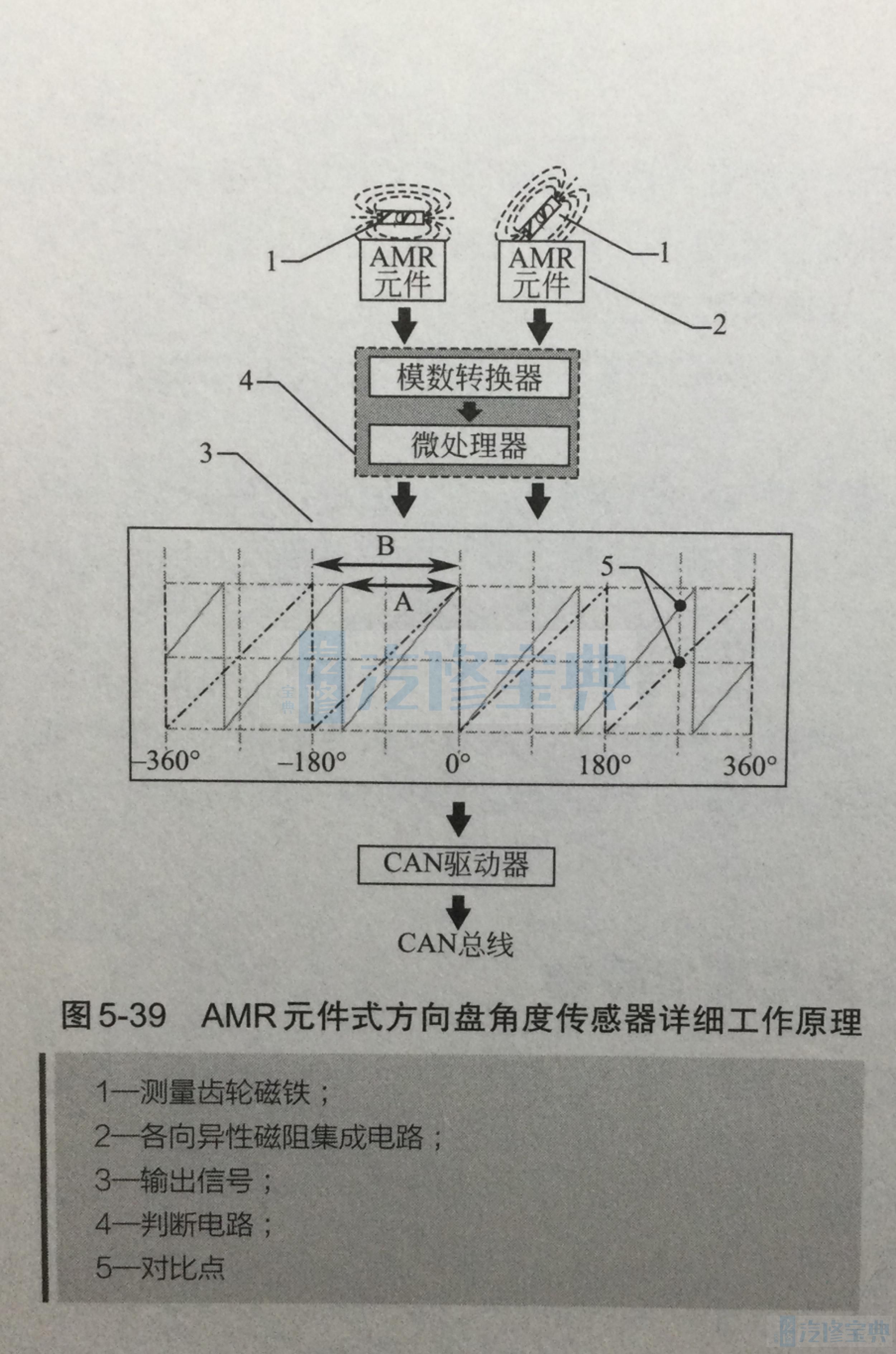
AMR元件式方向盘角度传感器详细工作原理如图5-39所示。
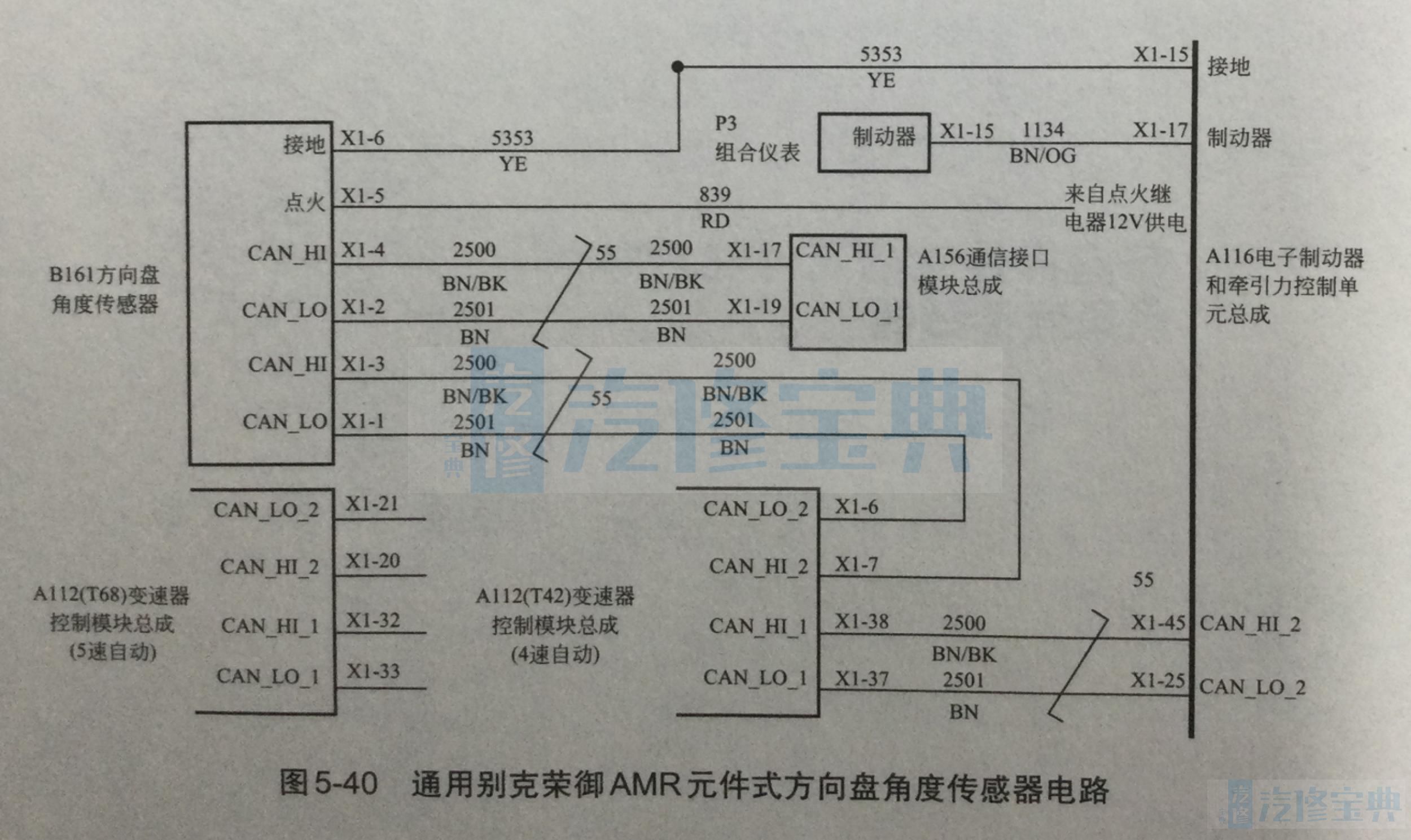
测量齿轮磁铁所产生磁场的角向与方向盘的角位相对应。该磁场改变各向异性磁阻元件的电阻值,使各向异性磁阻集成电路产生一对输出信号。两个测量齿轮之间的转速差使第二个各向异性磁阻集成电路的信号输出的范围比第一个各向异性磁阻集成电路的信号输出的范围要短。比较并判断这一差别以及两个各向异性磁阻集成电路输出信号在对比点处的变化率,从而计算出精确的方向盘角位。通用别克荣御汽车曾采用过这种类型的方向盘角度传感器,电路如图5-40所示。