一、车道偏离报警系统定义。 车道偏离报警( Lane Departure Warning,LDW)系统是一种通过报警或振动等方式辅助驾驶员减少汽车因车道偏离而发生交通事故的系统。该系统通过摄像头检测前方车道线,计算出车身与车道线之间的距离,判断汽车是否偏离车道;在驾驶员无意识(未打转向灯)偏离原车道时,系统能在偏离车道0.5s之前发出警告或转向盘开始振动,提示驾驶员回到本车道内,减少因汽车偏离车道引发的危险,如图7-9所示。
二、车道偏离报警系统组成。
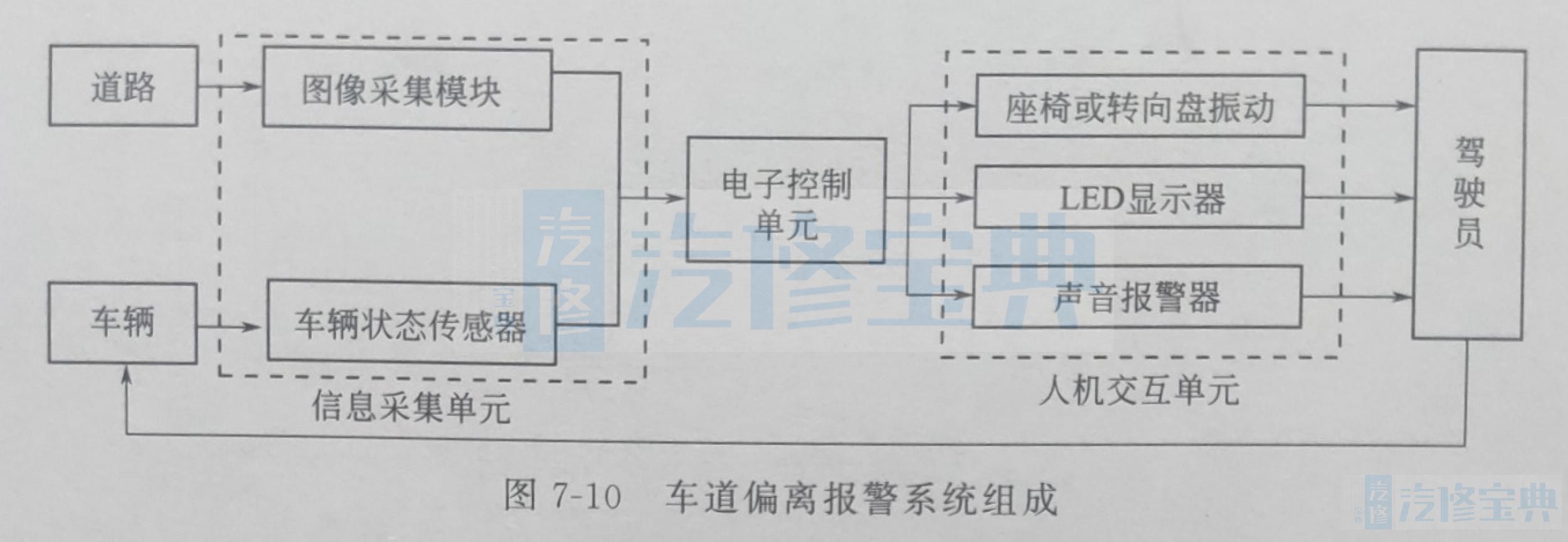
车道偏离报警系统主要由信息采集单元、电子控制单元和人机交互单元等组成,如图7-10所示。
(1)信息采集单元信息采集单元包括图像采集模块和车辆状态传感器,图像采集模块是利用视觉传感器(摄像头)完成车辆前方道路图像和环境信息的采集,并将模拟视频信号转换为数字视频信号;车辆状态传感器采集车速、车辆转向状态等车辆运动参数。
(2)电子控制单元电子控制单元完成数字图像处理、车辆状态分析以及决策控制等功能,判断汽车是否偏离车道,如果发生偏离,就发出报警信息。
(3)人机交互单元人机交互单元通过显示界面向驾驶员提示系统当前的状态,当存在危险情况时,报警装置可以发出声音、光的提示,也有座椅或转向盘振动的形式。
三、车道偏离报警系统工作原理。
当车道偏离报警系统开启时,系统利用安装在汽车上的图像采集单元获取车辆前方的道路图像,控制单元对图像进行分析处理,从而获得汽车在当前车道中的位置参数,车辆状态传感器会及时收集车速、车辆转向状态等车辆运动参数,控制单元的决策算法判定车辆是否发生车道偏离。当检测到汽车距离当前车道线过近有可能偏入临近车道或驶离本车道而且驾驶员并没有打转向灯时,人机交互界面就会发出警告信息,提醒驾驶员注意纠正这种无意识的车道偏离,及时回到当前行驶车道上,为驾驶员提供更多的反应时间,从而尽可能地减少车道偏离事故的发生。如果驾驶员打开转向灯,正常进行变线行驶,则车道偏离报警系统不会做出任何提示。
四、车道偏离报警系统功能。
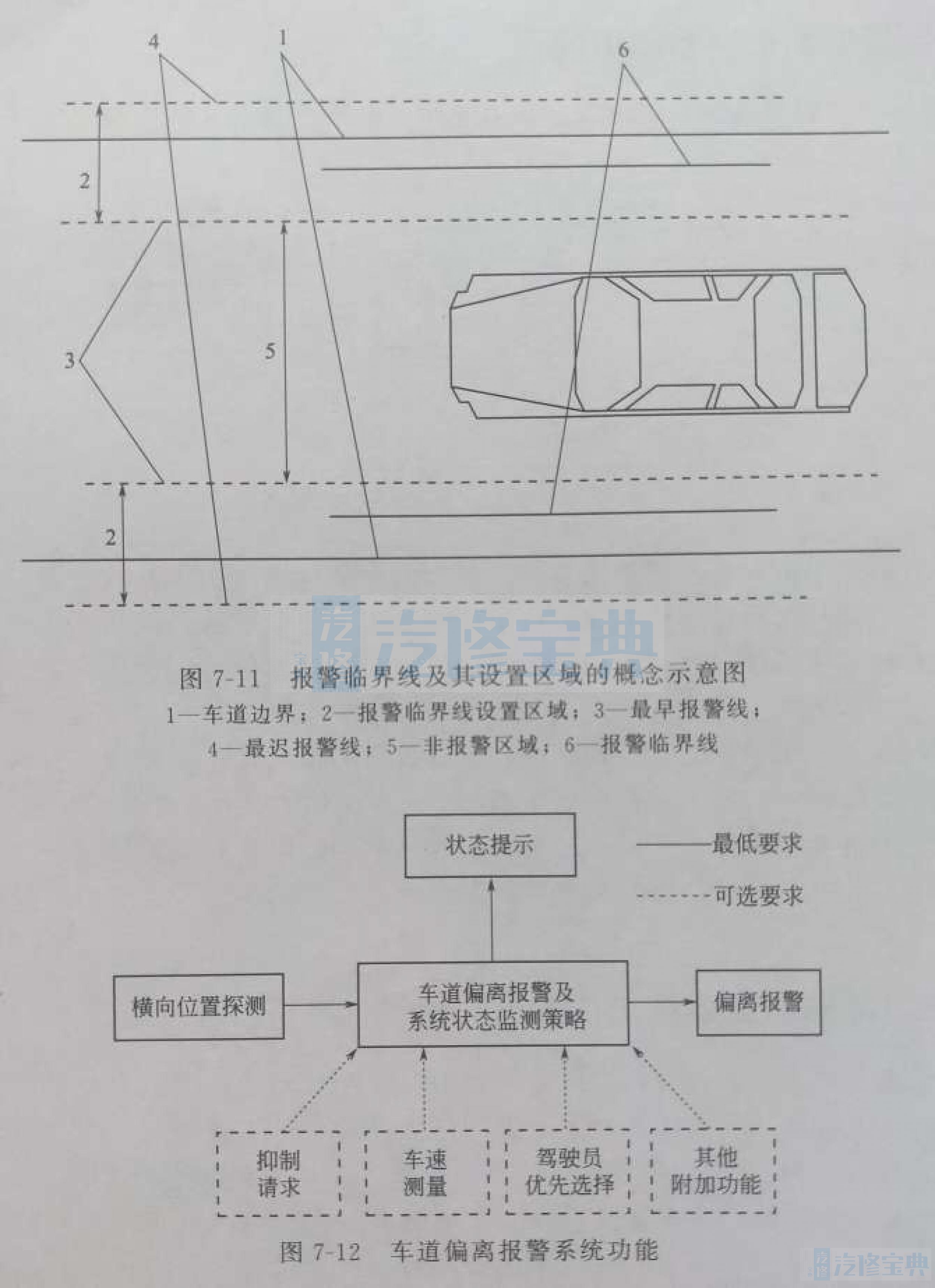
报警临界线及其设置区域的概念示意图如图7-11所示。
车道偏离报警系统的功能构成如图7-12所示,其中抑制请求、车速测量、驾驶员优先选择以及其他附加功能是可选的。
抑制请求是指当探测到驾驶员有意要偏离车道时,能根据驾驶员请求或系统功能而禁止系统发出报警的能力。
偏离报警是指在没有抑制请求的前提下,因满足车道偏离报警条件而向驾驶员发出的报警。
状态提示是对系统当前所处状态的提示,如开或关、故障、失效等。
五、车道偏离报警系统要求。
1.基本要求。
车道偏离报警系统至少应具有下列功能。
①监测系统状态,包括系统故障、系统失效、系统的开/关状态(如果有开关)。
②向驾驶员提示系统当前的状态。
③探测车辆相对车道边界的横向位置。
④判断是否满足报警条件。
⑤发出报警。
2.操作要求。
①当满足报警条件时,系统应自动发出报警提醒驾驶员。
②乘用车最迟报警线位于车道边界外侧0.3m处;商用车最迟报警线位于车道边界外侧1m处。
③当偏离速度0
车道偏离报警系统对应用环境有较高的要求,如行车速度、路面宽度、车道标线的清晰程度、天气条件、光照变化等,都将影响车道偏离报警系统的应用效果。研究各种鲁棒性强、能适应各种天气条件、克服光照变化以及阴影条件影响的车道偏离评价算法是所有基于视觉的车道偏离报警系统的发展趋势。