通常只能通过避让绕行操作避免与另一辆车(例如堵车时最后一辆车)或障碍物碰撞。因为与制动操作时相似,避让绕行操作时驾驶员的反应时间起决定性作用,所以避让绕行辅助系统可以非常显著地防止出现碰撞危险。 避让绕行辅助系统可在必须避让障碍物的危险行驶状况下,通过有针对性的转向干预为驾驶员提供支持。此外该系统还有助于在避让绕行操作期间或之后使车辆保持稳定,可通过动态稳定控制系统、电子助力转向系统和辅助系统传感器数据分析之间的相互作用实现。
工作原理如下。
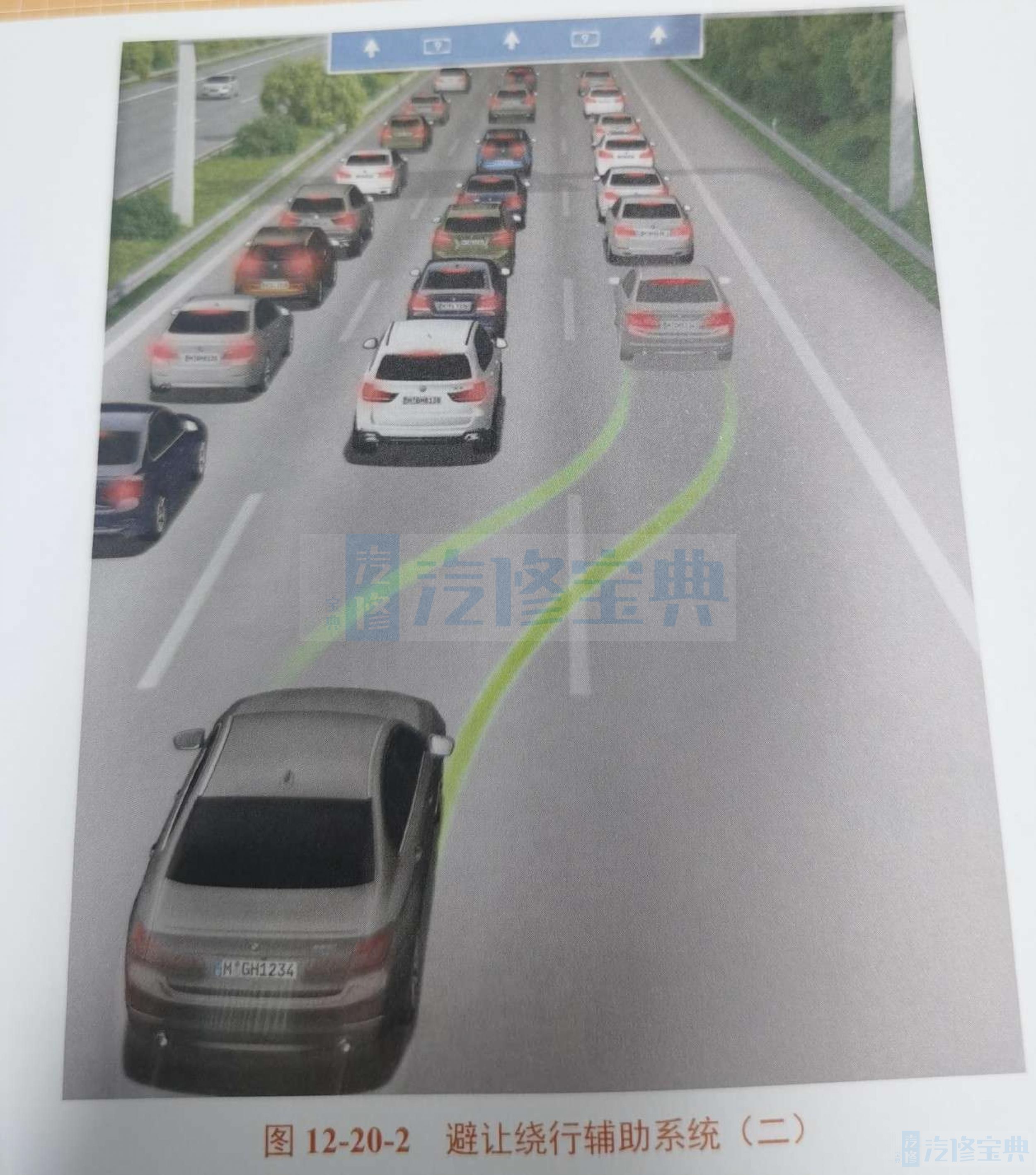
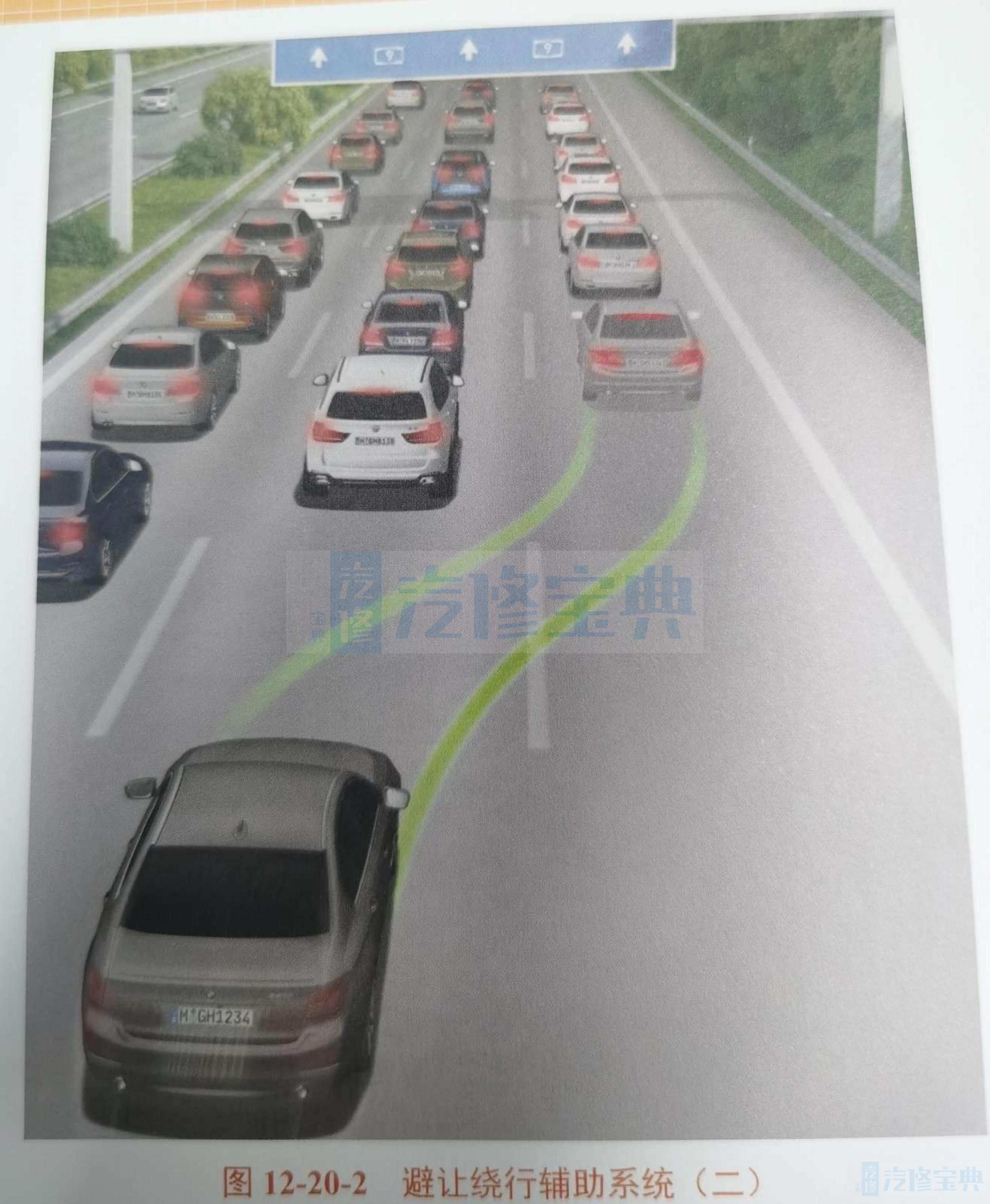
如果避让绕行辅助系统识别到车辆前方突然岀现障碍物且驾驶员必须快速避让该障碍物同时不必“显著”制动,就会进行紧急情况避让绕行。
系统在自身车辆的物理极限范围内计算“避让绕行轨迹”,用于使横向动力最小化。
如图所示,预计进行避让绕行操作前,会预先做好车辆准备。在此按特性调整用于稳定车辆的所有功能,以便降低车辆状态不稳定或驾驶员负担过重的风险。
避让绕行辅助系统检查当前车辆位置和驾驶员对方向盘的控制,然后将信息与计算出的“避让绕行轨迹”比较。如果系统识别到偏差,则协调进行校正式转向干预,以按照事先估计的“避让绕行轨迹”操控车辆。
如果识别到有碰撞危险的情况且发岀严重警告,则避让绕行辅助系统评估交通情况并根据这种危险情况分析用于避让绕行操作的自由空间。为此雷达传感器和立体摄像机监控车辆周围环境,如果前方车辆旁存在一种避让绕行方案且识别到本车侧面没有碰撞物体,则该系统可能进行支持性干预。
该系统在40~160km/h的车速范围内为驾驶员提供支持。驾驶员通过快速操作方向盘开始避让绕行操作,同时确定避让绕行方向。必要时会中止或抑制严重警告引起的制动于预。通过电子助力转向系统进行支持性转向干预。系统使车辆“敏捷地”转过障碍物,同时使车辆重新“稳定”在避让绕行通道内。
由于改善了车辆对驾驶员转向命令的反应,因此可以在不危及车辆总体稳定性的情况下快速高效地避让绕行。避让绕行辅助系统概览如图所示,其主要组件和重要传感器功能如下。
①具有停车和起步功能的主动定速巡航控制系统借助立体摄像机和前部雷达传感器识别物体或障碍物。
②四个侧面雷达传感器监控车辆周围环境,分析立体摄像机的数据,从而识别用于避让绕行的自由空间。
③在选装配置系统控制单元内计算规定轨迹,即真正的“避让绕行轨迹”。
④动态稳定控制系统控制单元内的行驶动态管理功能软件根据“避让绕行轨迹”计算规定转向力矩。
⑤规定转向力矩由电子助力转向系统转换为发动机扭矩,最终根据需要进行支持性转向干预。