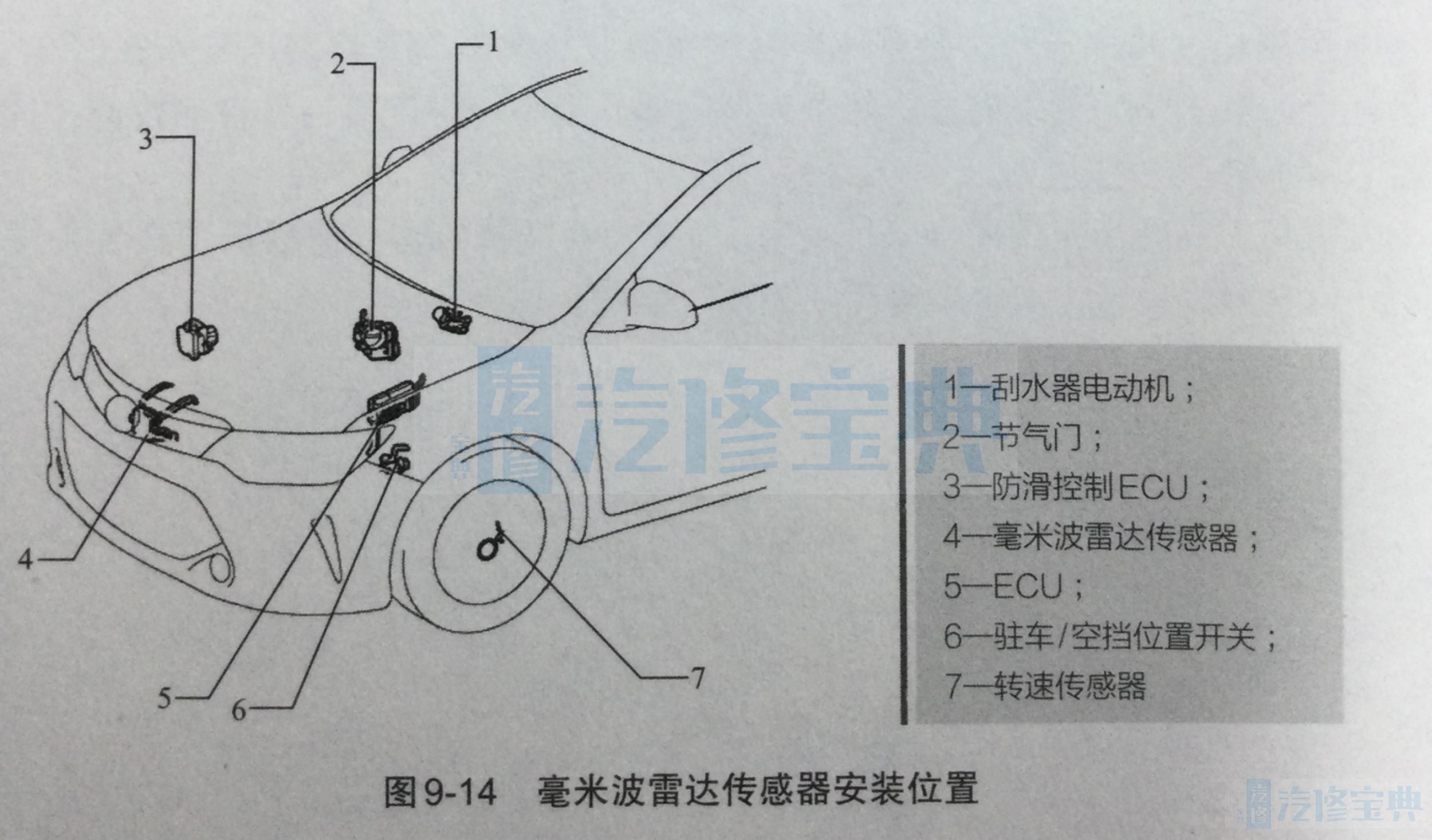
(1)结构与原理: 测距传感器又称雷达传感器,主要用于自适应巡航系统、自动泊车系统、倒车系统等,尤以自适应巡航系统和碰撞预测安全系统应用最为普遍。 丰田皇冠(2016款)、丰田凯美瑞(2016款混合动力车型)巡航系统和碰撞预防安全系统中所采用的毫米波雷达传感器结构与原理相同,安装位置如图9-14所示。
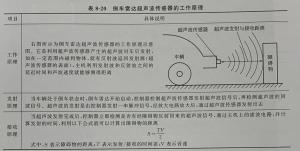
毫米波雷达传感器总成由毫米波雷达电路、信号处理电路和CPU组成。车速不低于2km/h时,毫米波雷达输出雷达波。毫米波雷达使用76.5GHz波段的频率。
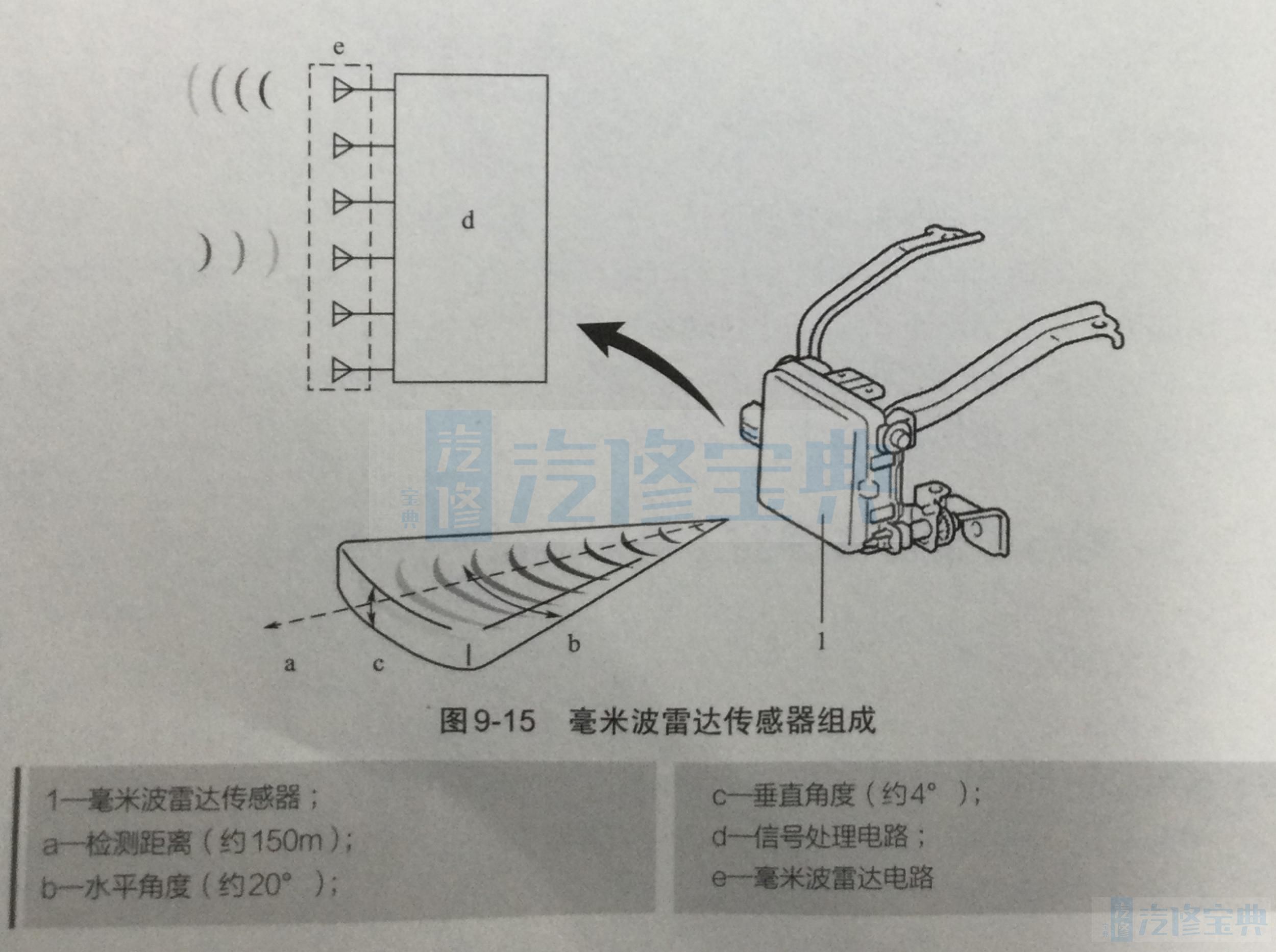
接收天线接收反射的毫米雷达波,信号处理电路通过产生毫米雷达波并计算接收天线接收到的信号检测物体的距离、相对速度和方向,然后将该信息传输至行驶辅助ECU总成,如图9-15所示。
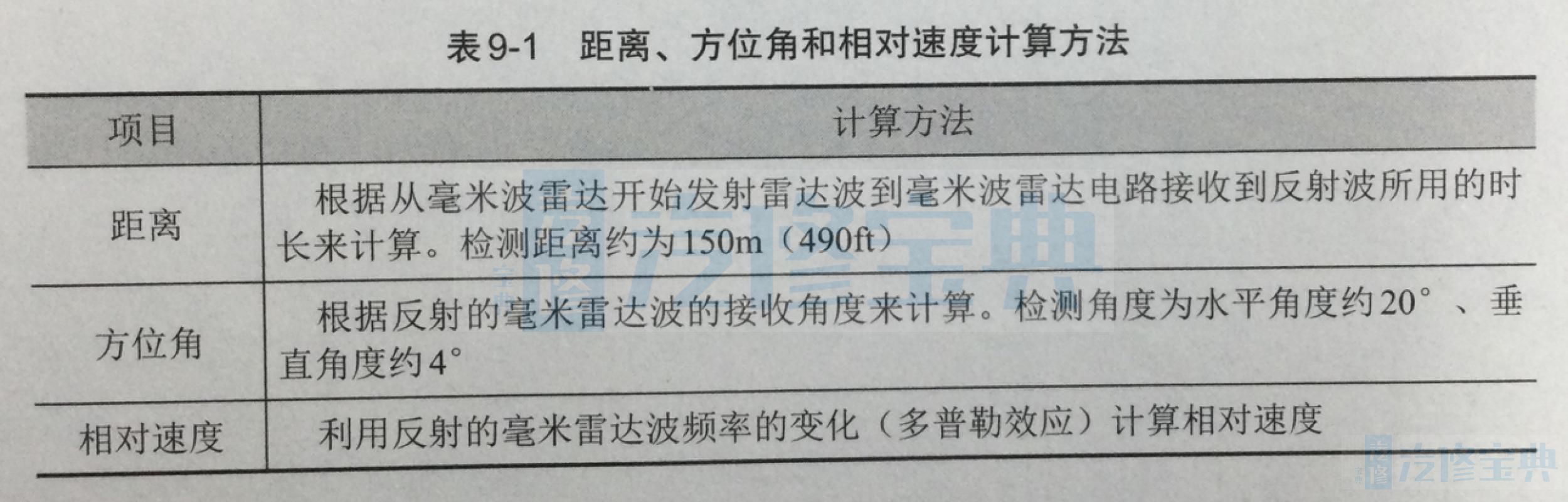
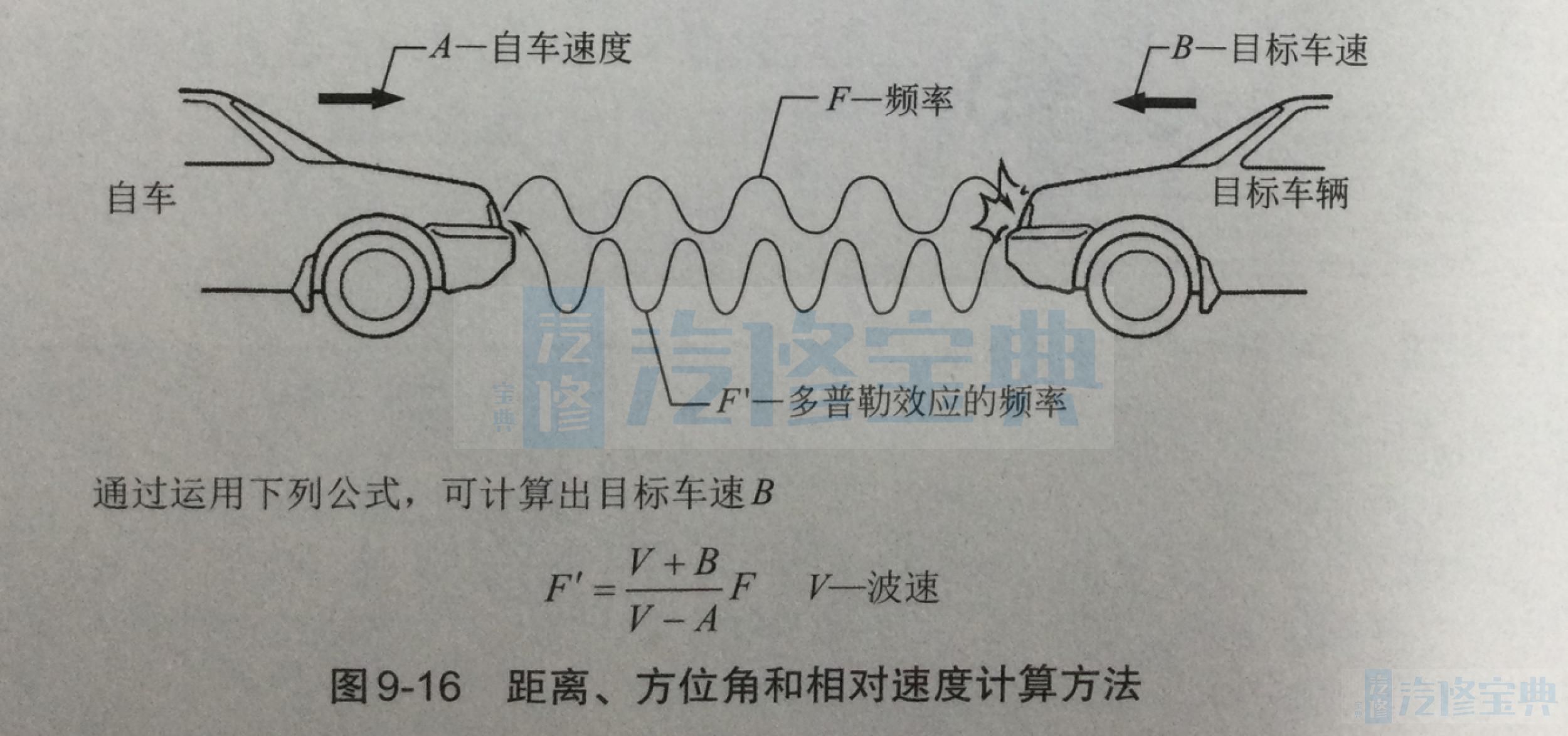
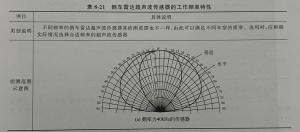
距物体的距离、方位角和相对速度是根据反射的毫米雷达波所提供的信息计算出来的。计算方法如表9-1、图9-16所示。
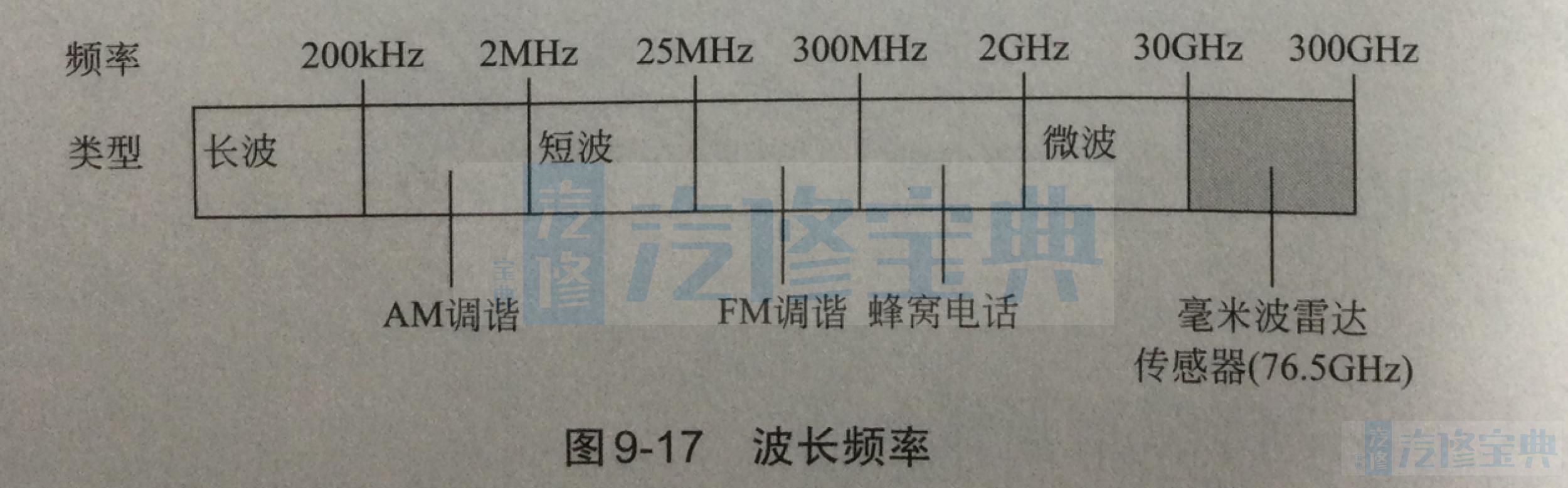
毫米波雷达在真空中使用30~300GHz之间的极高频率和1~10mm的极短波长。碰撞预测安全系统的毫米波雷达传感器采用76.5GHz波段内的频率,如图9-17所示。
毫米波雷达不宜受天气状况,如雨、雾或雪的影响,具有良好的物体识别特性。因此,非常适用于碰撞预测安全系统和动态雷达巡航控制系统。
(2)毫米波雷达传感器的调整:
毫米波雷达传感器信号不正常,会在碰撞预防安全系统控制单元中存储故障
码。确定传感器信号不正常后,需要先进行传感器调整,传感器本身不允许维修,只能更换总成。
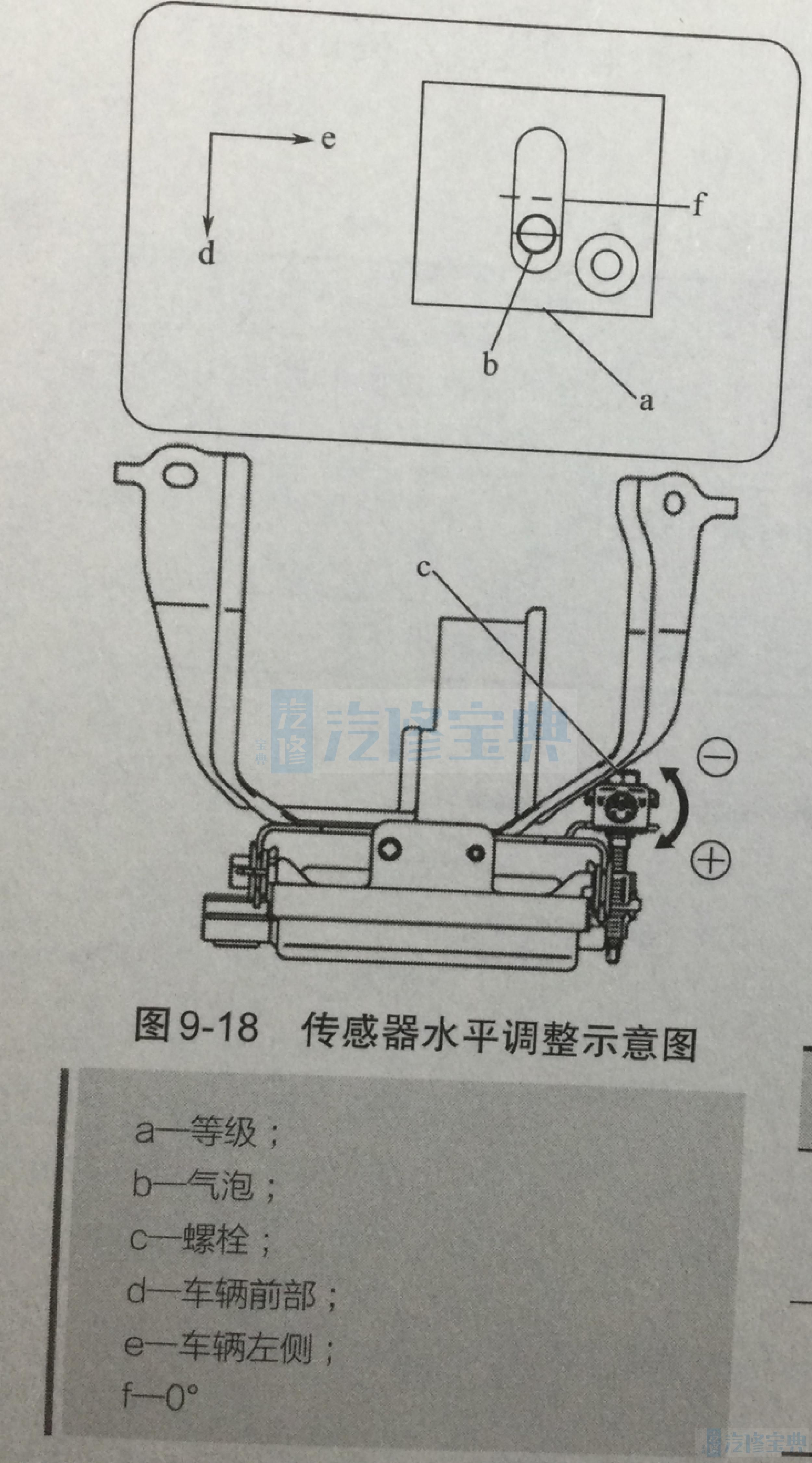
水平调整传感器总成:确保车辆停在水平路面上。调整前需要先检查轮胎压力,并从车上卸下超重物,如行李。拆下冷气进气管密封。
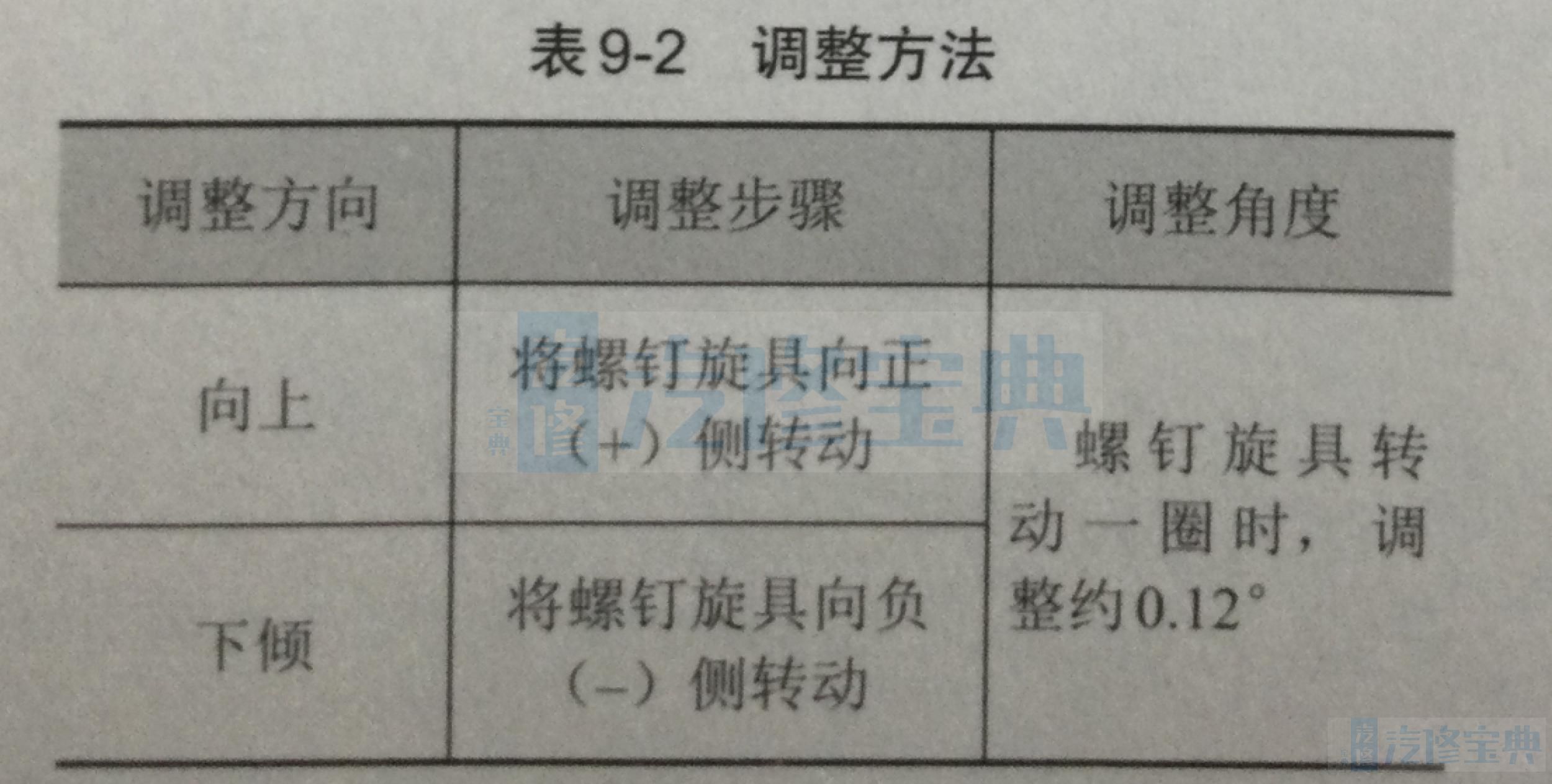
清除毫米波雷达传感器水平支架上的尘土、油污和异物。在毫米波雷达传感器水平支架上固定水平仪。检查水平仪气泡是否在红色框内。如果气泡不在红色框内,则使用螺钉旋具调整螺栓,直到气泡在红色框内为止,如图9-18所示。调整方法如表9-2所示