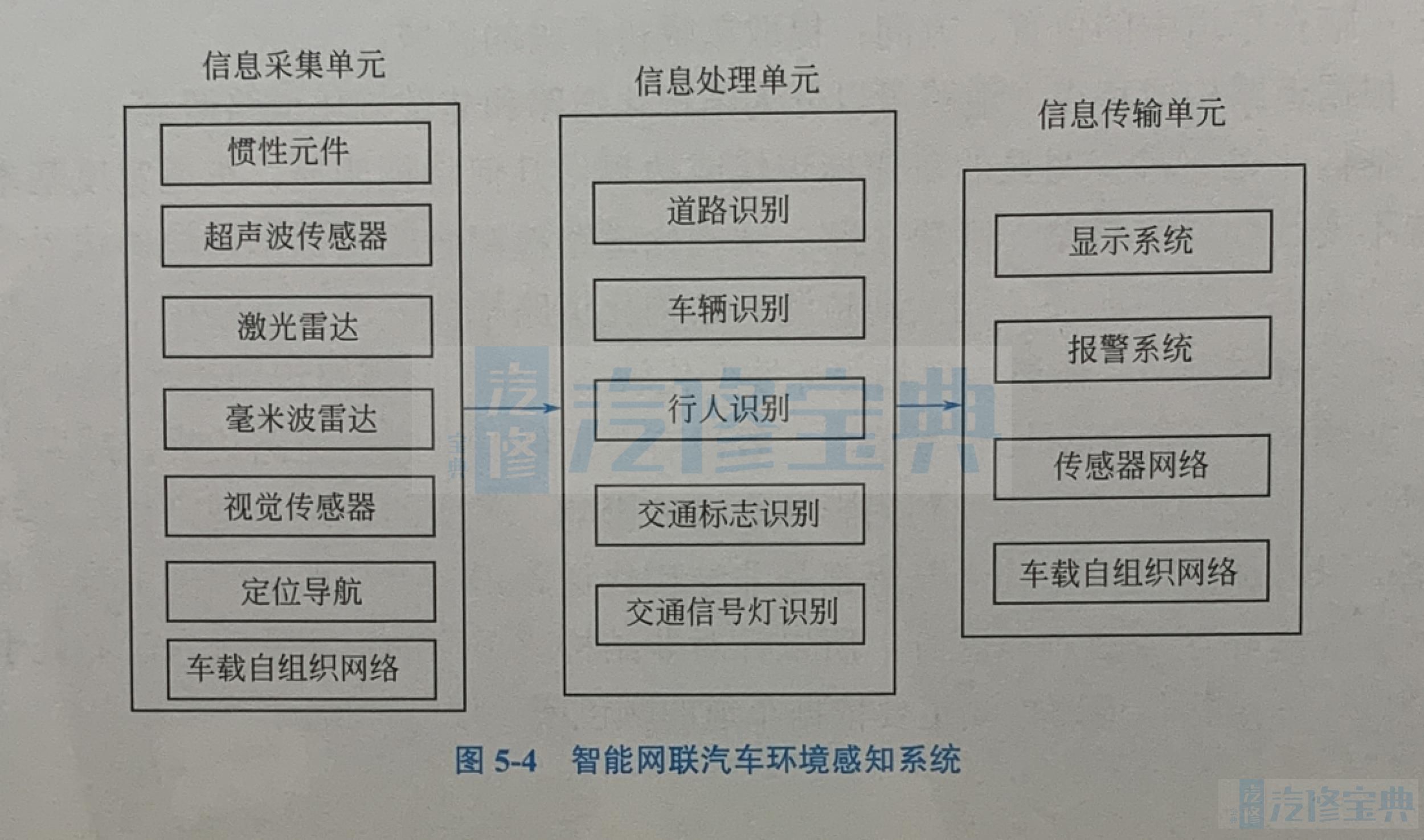
智能网联汽车环境感知系统由信息采集单元、信息处理单元和信息传输单元组成,如图5-4所示。
(1)信息采集单元 对环境的感知和判断是智能网联汽车工作的前提和基础,感知系统获取周围环境和车辆信息的实时性和稳定性,直接关系到后续检测或识别准确性和执行有效性。信息采集技术主要有超声波传感器、激光雷达、毫米波激光雷达、视觉传感器、定位导航及车载自组织网络技术等。
(2)信息处理单元 信息处理单元主要是对信息采集单元输送来的信号,通过一定的算法对道路、车辆、行人、交通标志、交通信号灯等进行识别(3)信息传输单元 信息处理单元对环境感知信号进行分析后,信息送入传输单元,传输单元根据具体情况执行不同的操作,如分析后的信息确定前方有障碍物,并且本车与障碍物车辆之间的距离小于安全距离,则将这些信息送入控制执行模块,控制执行模块结合本车速度、加速度、转向角等自动调整智能网联汽车的车速和方向,实现自动避障,在紧急情况下也可以自动刹车;信息传输单元把信息传输到传感器网络上,实行车内部资源共享;也可以把信息通过自组织网络传输给车辆周围的其他车辆,实现车辆与车辆之间信息共享。