

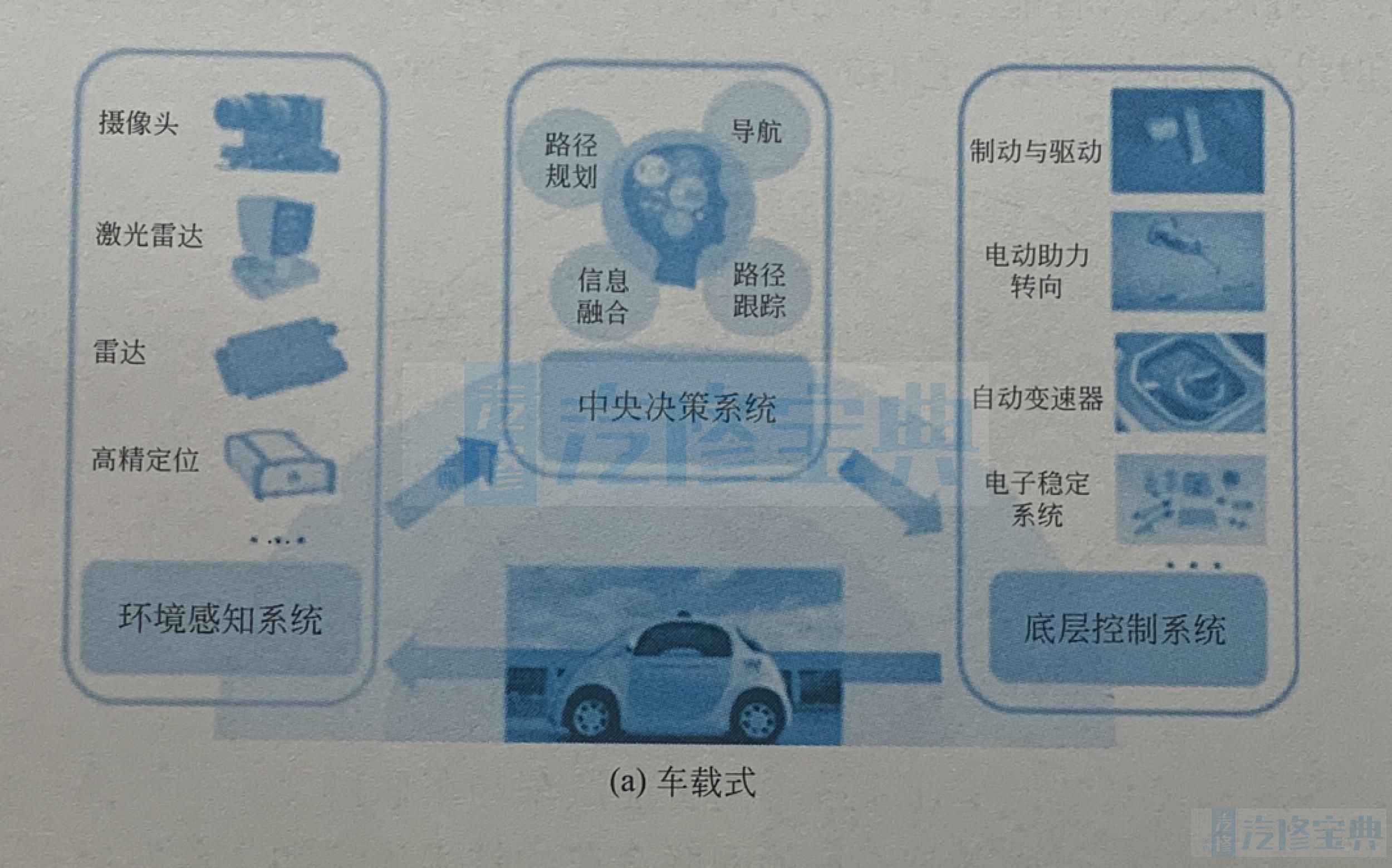
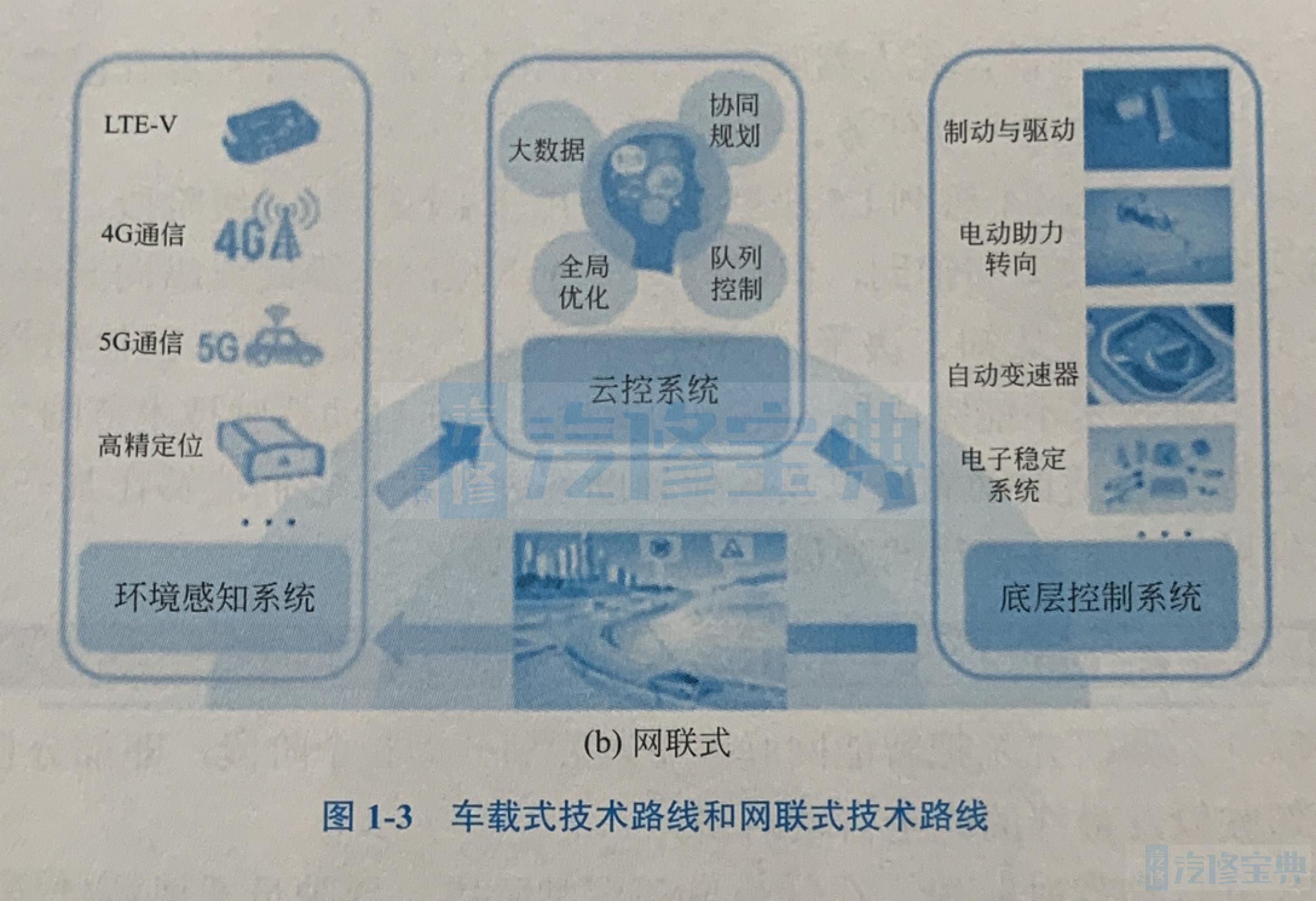
智能网联汽车技术路线主要分为基于传感器的车载式技术路线和基于通信互联的网联式技术路线,如图1-3所示。 车载式技术路线难以实现V2V、V2I之间的通信,大规模应用成本较高,并且缺少城市环境的全方位扫描;网联式方案则受限于无法实现车辆与行人(V2P)之间的通信,需要较大的基础设施投资。因此两种方案均不能完全满足未来全工况无人驾驶的需要。对于智能网联汽车,车载式和网联式将走向技术融合,通过优势互补,提供安全性更好、自动化程度更高、使用成本更低的解决方案。实现这种技术融合需要更先进的定位技术、更高分辨率的地图自动生成技术、可靠而直观的人机交互界面以及相关标准、法规等。





返回顶部