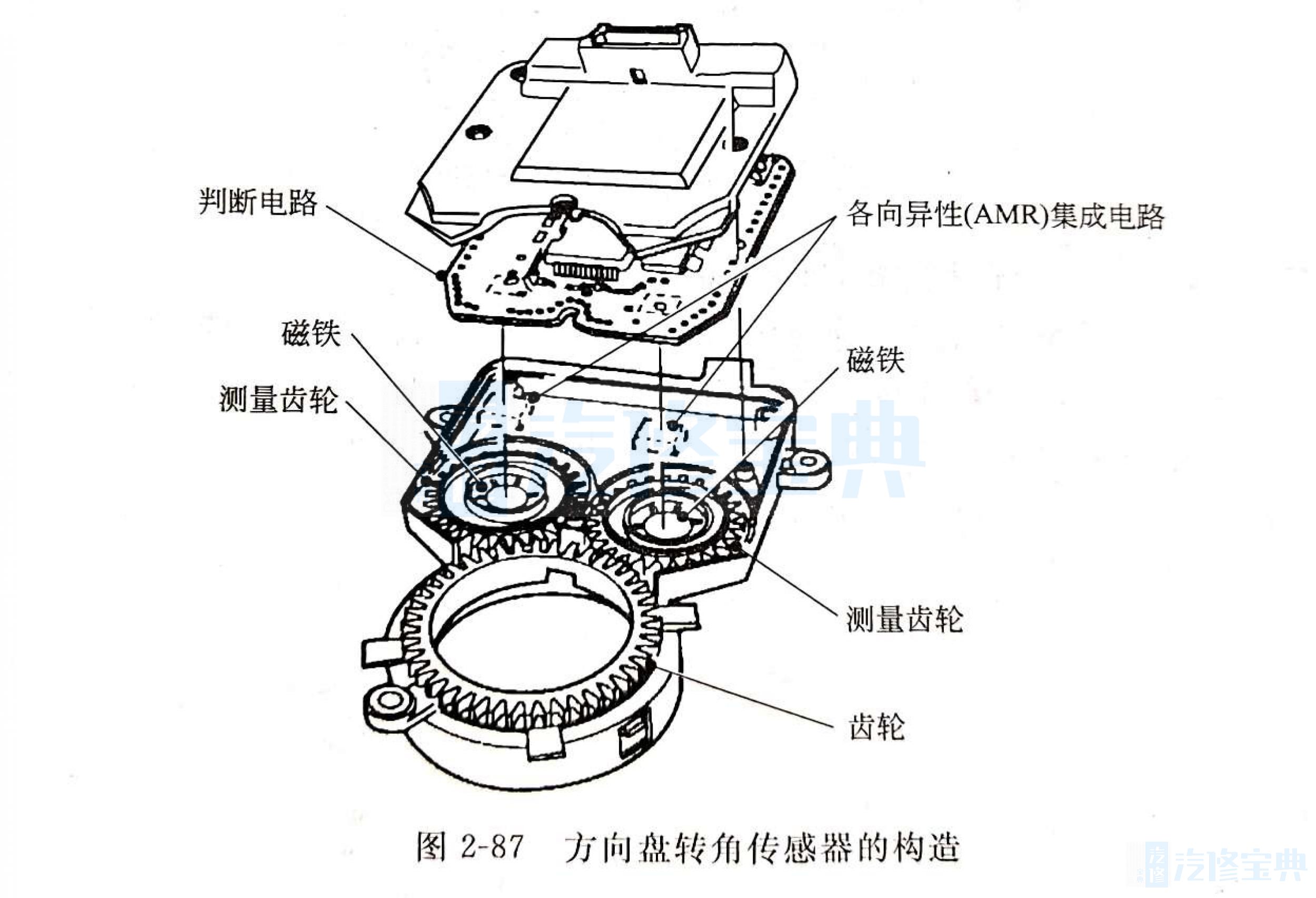
磁性薄膜在平行于膜面的外磁场作用下达到饱和磁化时,薄膜的电阻率将随外磁场方向装和电流方向的变化而变化,这种效应就是各向异性磁阻( Anisotropic Magneto Resistance,的AMR)效应。 1.结构。 别克荣御ESP系统中使用了各向异性磁阻式方向盘转角传感器,方向盘转角传感器位于方向盘下面,其内部结构如图2-87所示。
2.工作原理当驾驶员转动方向盘时,由键与方向盘连接的齿轮带动两个中心部分的磁铁的测敏齿轮转动。磁铁上方AMR传感器的电阻随着测量齿轮的转动而改变,电阻的变化反映了测量齿轮的位置,进而反映了方向盘角度的变化,即能产生一个可表示±760°方向盘旋转角度的输出信号。传感器的模拟输出信号通过一个A/D转换器输入到微处理器中,结合两个测量齿轮转动后的位置可以求出总的转动角度。由于两个测量齿轮的齿数不同,它们的转动速度也不同,故产生不同相位的两个转角信号,电子控制单元利用这个信息计算出驾驶员所要求的方向这种传感器的一个特点是在发动机点火时刻就可以立即得到方向盘绝对转角位置,无需利用算法推断。传感器信号通过CAN总线输出。传感器框图如图2-88所示。
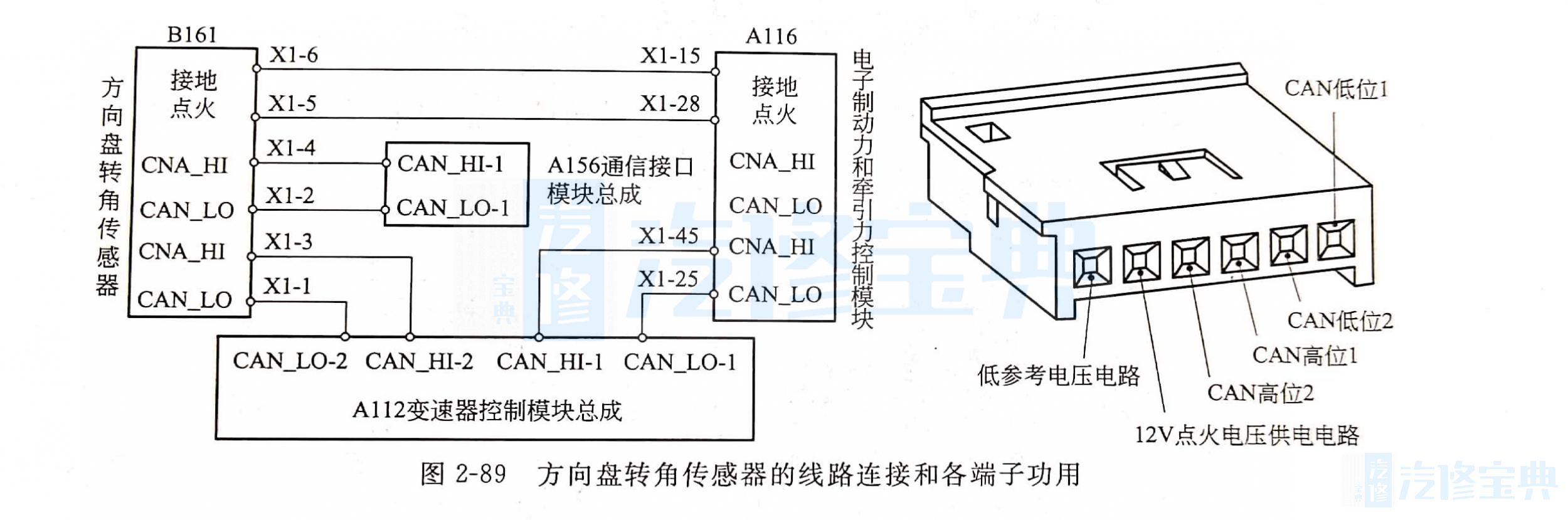
3.连接电路别克荣御方向盘转角传感器的线路连接和各端子功用见图2-89。根据电路图2-89,可以进行如下检测。
4.检测。
根据图2-89,可以进行如下检测:
(1)检测供电电压。
关闭点火开关,脱开传感器插头,再将点火开关置于“ON”,使用万用表测量5与6端电压,应该为12V,否则应检查线路。
(2)解码器读取故障码。
由于传感器信号通过CAN总线输出,因此通过解码器的自诊断检测是比较准确和快捷的方法。方向盘转角传感器出现故障,则会显示故障代码C0460。
3)校准方向盘转角传感器。
电子控制单元监测并判断方向盘转角传感器的输出信号,当车辆沿直线行驶了15min或以上时,电子控制单元将该行驶方向设定为正前方向。可使用Tech2进行方向盘转角传感器校准,初始化传感器的具体操作步骤是:
①将方向盘置于车辆笔直向前的正中位置;
②将Tech2连接到车辆上,并执行“Tech2方向盘转角传感器校准程序”即可。