1.车距传感器的作用。 车距传感器(如图2-138所示)应用在在APC(自动车距控制)系统中。APC系统是通过一个基于毫米波雷达技术的车距传感器进行距离测量的。系统同时测量与视野范围内几个物体的距离以及沿车辆纵向的相对车速。通过这些测量值,计算出每个物体与其视野范围中心线的角度偏差(方位角)。 2.车距传感器安装位置。 车距传感器安装在保险杠塑料盖板后面,如图2-139所示。发出光束的透镜很容易辨认出来。
3.结构。
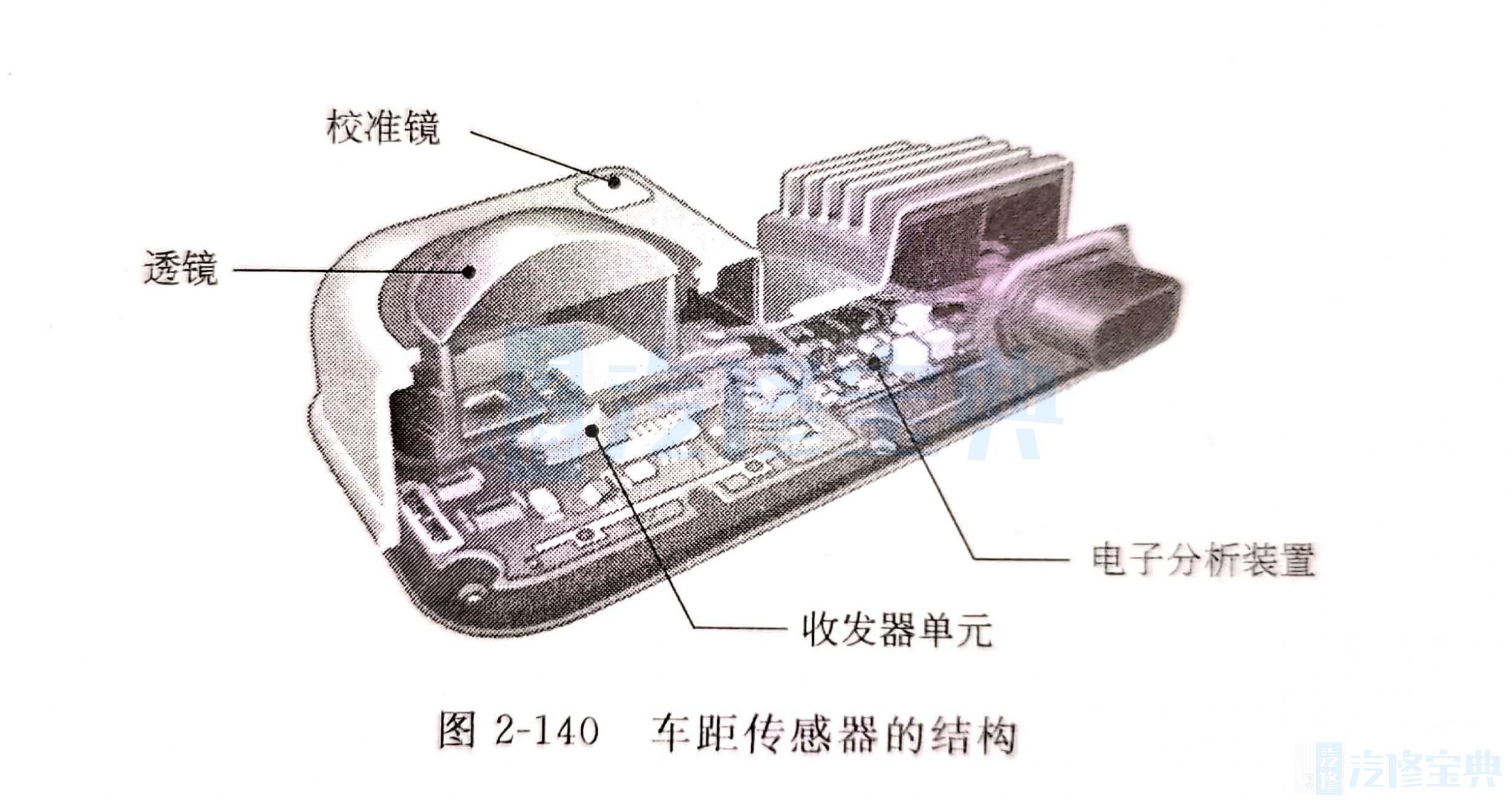
车距传感器主要由透镜、校准镜、电子分析装置和收发单元等组成,如图2-140所示。
在车距传感器壳体内集成了计算效率非常高的处理器。它将进行以下附加计算:
①行车道预报。
②相关物体的选择。
③距离和定速巡航。
④发动机控制单元、制动助力器和组合仪表的启用。
⑤自诊断。
4.工作原理。
车距传感器的视野范围可以比作大灯聚光灯的照亮区域。对于大灯而言,传感器的视野区域中心线必须与行驶方向精确对准车距传感器依靠电磁波工作,该波以光速c进行传播。频率为f的波运行一个周期需要个波长A。它的发射频率为f=76.5GHz,波长λ=3.92mm。频率f为30~150GHz的波称为毫米波。
(1)车辆匀速行驶:
如果在车距传感器的探测区域内没有发现车辆,则车距传感器会发送信号给电控单元电控单元会控制车辆保持期望车速行驶。
(2)车辆减速行驶:
如果一辆带APC系统汽车(后车辆)的车距传感器探测到前方同一车道上有一辆行驶较慢的汽车(前车辆),车距传感器向APC系统控制单元输入信号,APC系统控制单元会自动控制减小发动机的扭矩,并在必要时采取必要的制动,以此将两车车距调节到驾驶员预设的值,该值为受时间控制的值,如图2-141所示。
当车距传感器检测到前方有慢车插入时,并向APC系统控制单元发送信号。车辆通过减速作出反应,使本车速度与前车速度相当,如图2-142所示。
(3)车辆减速或变道行驶。
当车距传感器检测到前方车辆加速或者变换行车道时,并向APC系统控制单元发送信号,如图2-143所示。APC控制单元根据此信号控制本车重新加速,恢复到预设车速