环境感知方法主要有惯性元件、超声波传感器、激光雷达、毫米波雷达、视觉传感器、自组织网络、融合传感等。 (1)惯性元件惯性元件主要是指汽车上的车轮转速传感器、加速度传感器微机械陀螺仪、转向盘转角传感器等,通过它们感知汽车自身的行驶状态。 (2)超声波传感器超声波传感器主要用于短距离探测物体,不受光照影响,但测量精度受测量物体表面形状、材质影响大。 (3)激光雷达激光雷达可以获取车辆周边环境二维或三维距离信息,通过距离分析识别技术对行驶环境进行感知。激光雷达能够直接获取物体三维距离信息,测量精度高,对光照环境变化不敏感;但它无法感知无距离差异的平面内目标信息,体积较大,价格较高,不便于车载集成。 (4)毫米波雷达毫米波雷达与激光雷达一样,也可以获取车辆周边环境二维或三维距离信息,通过距离分析识别技术对行驶环境进行感知。毫米波雷达抗干扰能力强,受天气情况和夜间的影响小,体积小;传播损失比激光雷达少,行人的反射波较弱,难以探测。
实时性好,体积小,能耗低,价格低;但易受光照环境影响,三维信息测量精度较低。
(6)自组织网络 通过车载自组织网络可以获取车辆行驶周边环境信息和周边其他车辆行驶信息,也可以把车辆本身的信息传递给周边其他车辆。通过车载自组织网络能够获取其他传感手段难以实现的宏观行驶环境信息,可实现车辆之间信息共享,对环境干扰不敏感(7)融合传感 融合传感是指运用多种不同传感手段获取车辆周边环境多种不同形式信息,通过多信息融合技术对行驶环境进行感知,如视觉与毫米波雷达视觉与激光雷达、视觉与超声波传感器的融合等。其优点是能够获取丰富的车辆周边环境信息,具有优良的环境适应能力,为安全快速辅助驾驶提供可靠保障;
缺点是系统复杂,成本高。
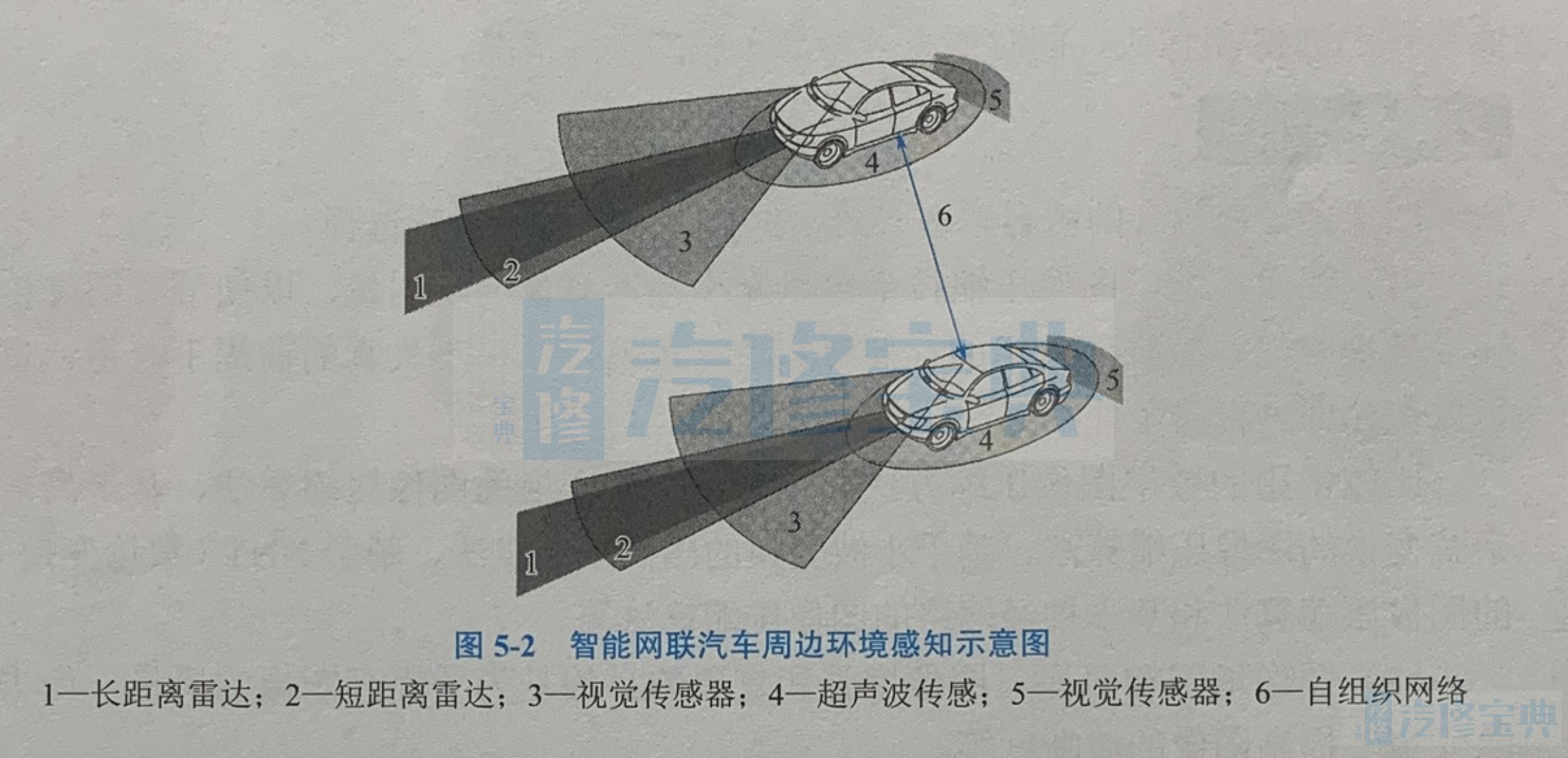
图5-2所示为智能网联汽车周边环境感知示意图。