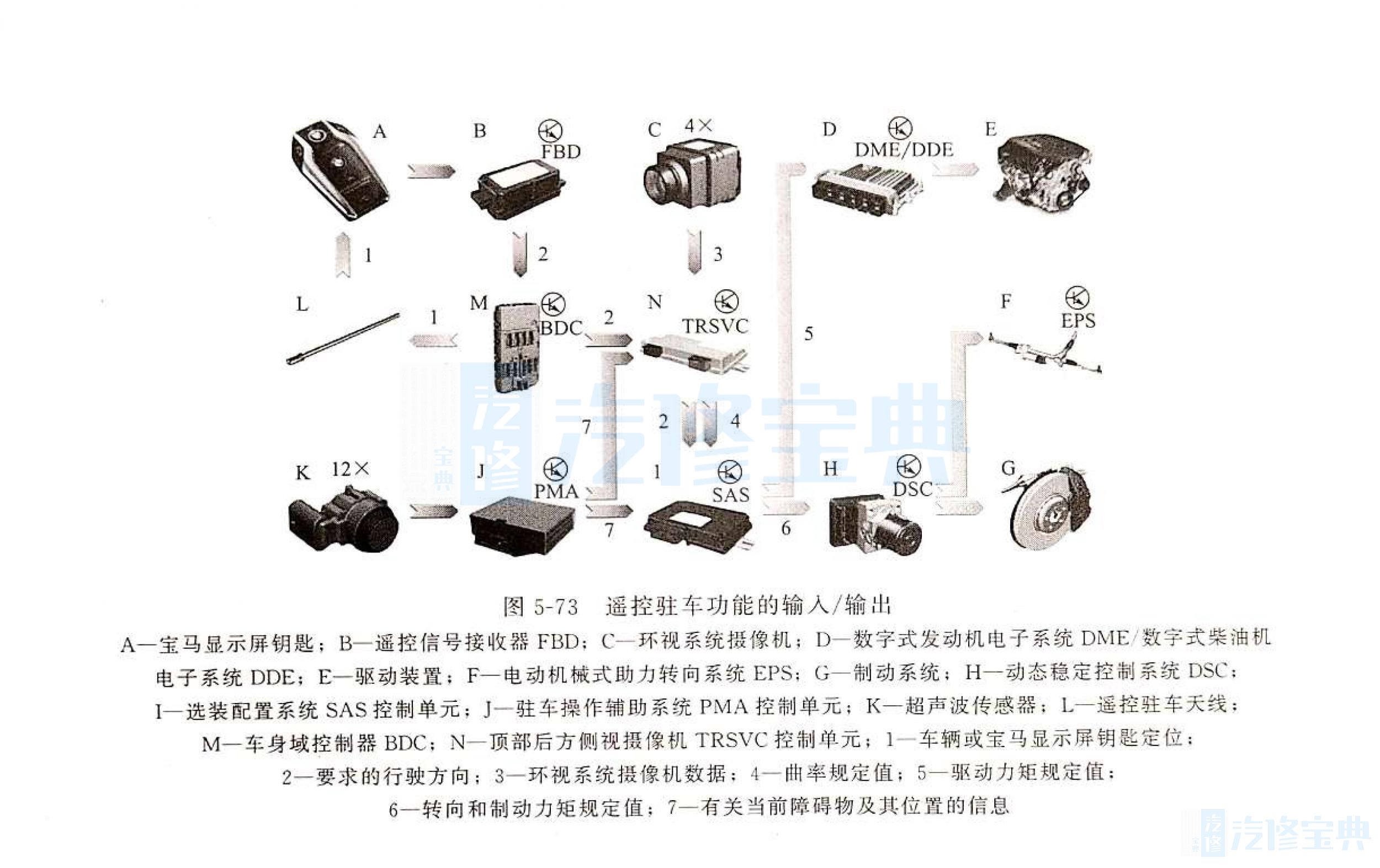
顶部后方侧视摄像机 TRSVO控制单元和SAS控制单元是遥控驻车功能的主要系统组件。通过驻车距离监控系统和驻车操作辅助系统的超声波传感器以及环视系统摄像机进行环境识别。进行驾驶员或宝马显示屏钥匙定位时使用舒适登车系统天线和遥控驻车天线图5-72突出展示了遥控驻车功能系统组件。遥控驻车功能的输入/输出如图5-73所示。
1.纵向导向。
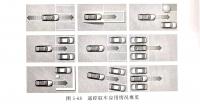
如图5-74所示,顺利启用并按压遥控驻车按钮后,驾驶员通过按压箭头符号规定所需行驶方向。由此要求的行驶方向(2)被发送至遥控信号接收器(B),并通过车身域控制器(M)和 TRSVC控制单元(N)传输至SAS控制单元(1)。在整个驻车过程中,车身域控制器通过遥控驻车天线(L)和舒适登车系统天线检查驾驶员是否位于操作范围(1)内由于装有遥控天线,因此车辆后方的操作范围超过仅通过舒适登车系统天线实现时的范围负责纵向导向的SAS控制单元由此确定相应规定值(5和6),并将其发送至DSC控制单元(H)和数字式发动机电子系统DME或数字式柴油机电子系统DDE(D)。根据驻车操作辅助系统PMA(7和J)提供的距离信息,系统自动进行制动和加速。
2.横向导向。
启用遥控驻车功能期间, TRSVO控制单元(N)通过超声波传感器(K)和环视系统摄像机(C)测量停车位。通过这种方式可计算出停车终止线和最大允许曲率,并将其发送给SAS控制单元(1)。在SAS控制单元内根据这些数据计算“规定曲率”,“规定曲率”是需车辆行驶轨道的曲率计算的规定曲率由SAS控制单元传输至DSC控制单元(H),并在此换算为转向力矩电动机械式助力转向系统EPS使用。此外,还在DSC控制单元内计算车速。
3.系统限制。
系统不能免除准确评估交通情况和驻车情况的自身责任。由于存在系统限制,并非在所有情况下系统均可自动做出适当反应,有发生事故或物品损坏的危险。应观察交通情况和驻车情况并结合具体情况进行主动干预,在挂车模式下通过遥控驻车功能提供驻车支持出现路面不平,例如碎石路面,路面光滑,上坡或下坡坡度较大,停车位内有树叶堆积或雪堆等情况时,该功能可能会受到限制。