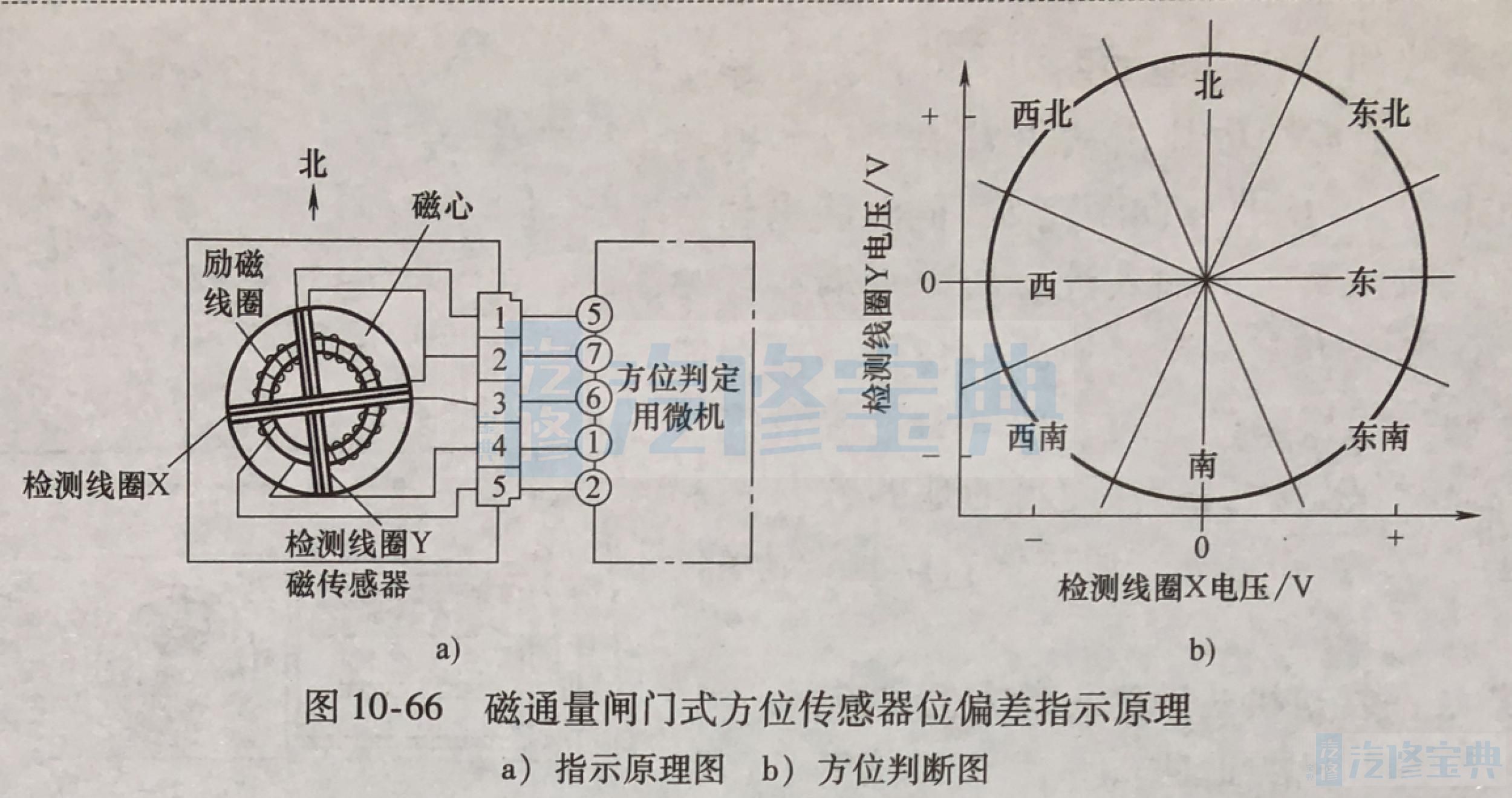
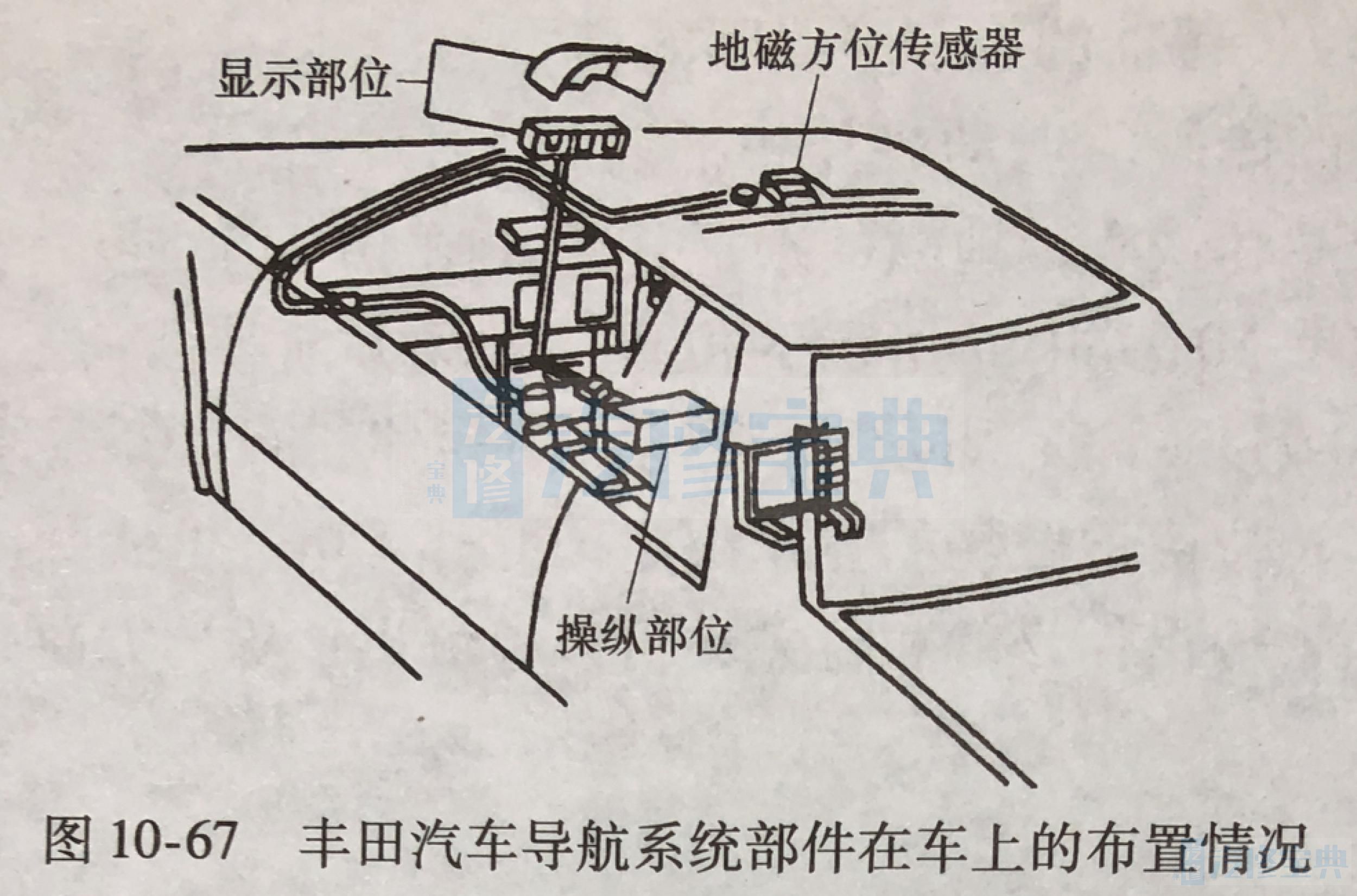
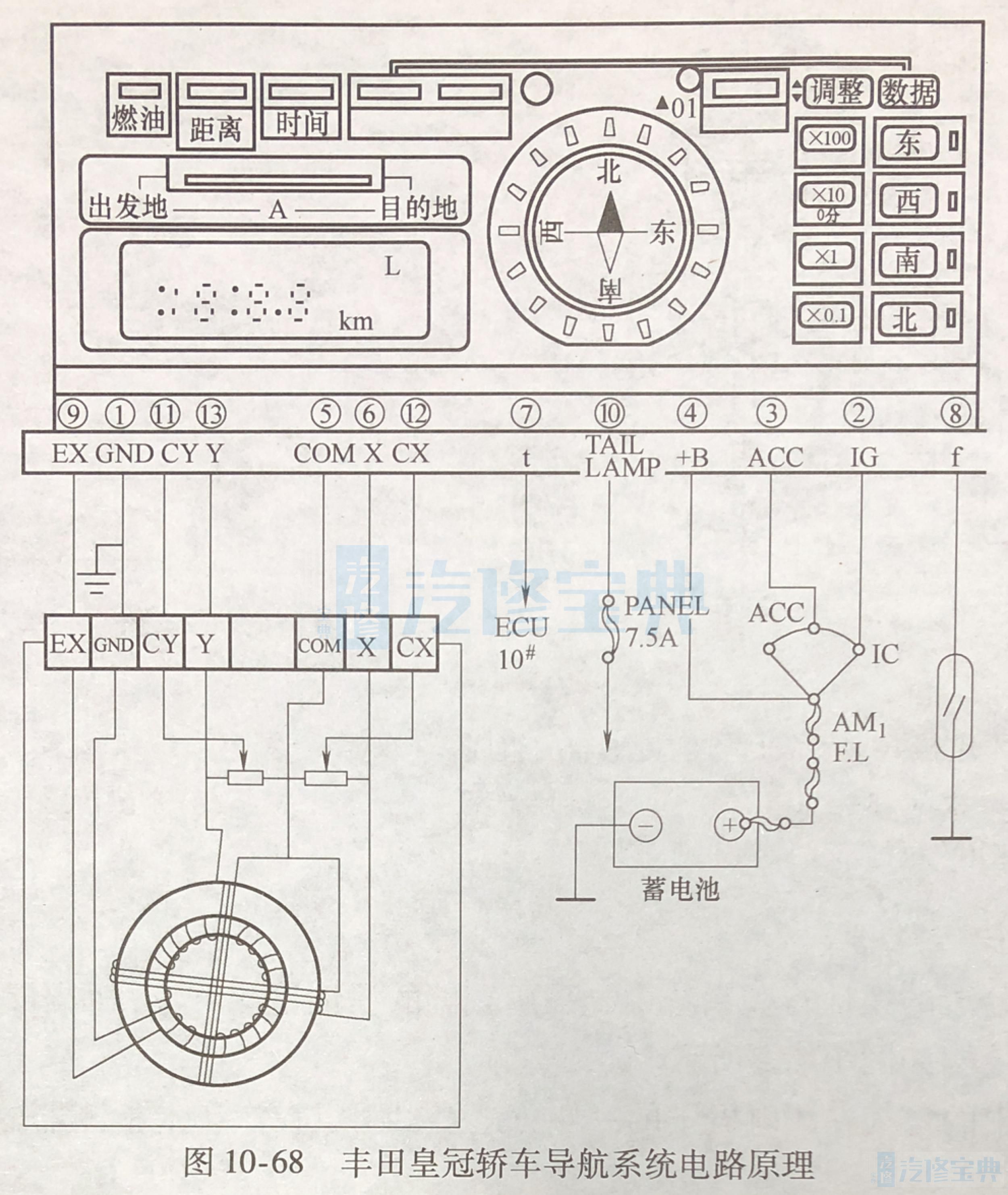
方位与方向传感器在汽车导航系统应用,用以指示汽车行驶方向的偏差。 1.磁通量闸门式方位传感器。 磁通量闸门式方位传感器用在汽车的导航系统中,是利用地磁进行检测的传感器,可以指示方向的偏差。方向指示的原理如图10-66所示。 当绕在环状铁心上的励磁线圈通入交流电时,产生强度与方向呈周期变化的磁场,测定与磁场交链的检测线圈X、Y的输出电压,就可知道方位了(图10-66b)。 以丰田汽车上使用的导航系统为例,说明方位传感器在汽车导航中的应用,导航系统由显示部分、操纵部分、地磁方位传感器及行驶距离传感器等组成。导航系统在车上的布置如图10-67所示,导航系统的电路原理如图10-68所示。
2.双线圈发电机式地磁矢量方位传感器。
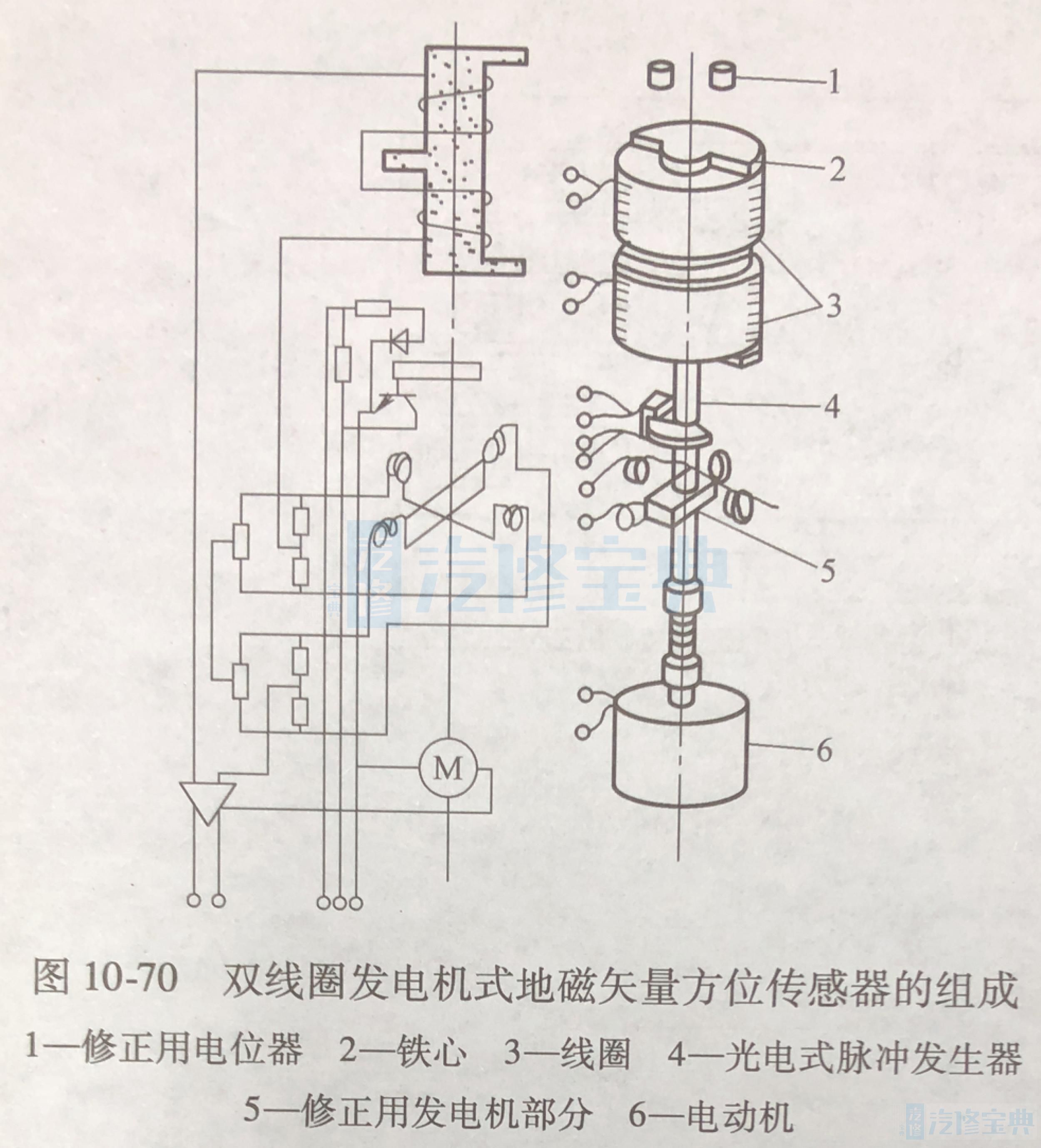
双线圈发电机式地磁矢量方位传感器的组成如图10-70所示。该方位传感器的上、下线圈的相位相反,所以垂直方向的磁感应电动势互相抵消。
如果改用电动机转动线圈和铁心,地磁的水平分量(图10-71)使铁心中的磁通密度发生变化,从而建立磁场。在图10-71中a所示的位置,磁场方向朝内;图10-71中b所示位置,磁场强度为零;在图10-71中c所示位置,磁场方向朝外。所以,在地磁检测线圈中,产生一个正弦交变电压,其相位由地磁场的方位决定。此外,由光电式脉冲发生器发出相位固定的脉冲信号,根据这两个输出信号的相位差,可以检测出地磁的方向,由此可检测出汽车的方位。
3.惯性式方向传感器。
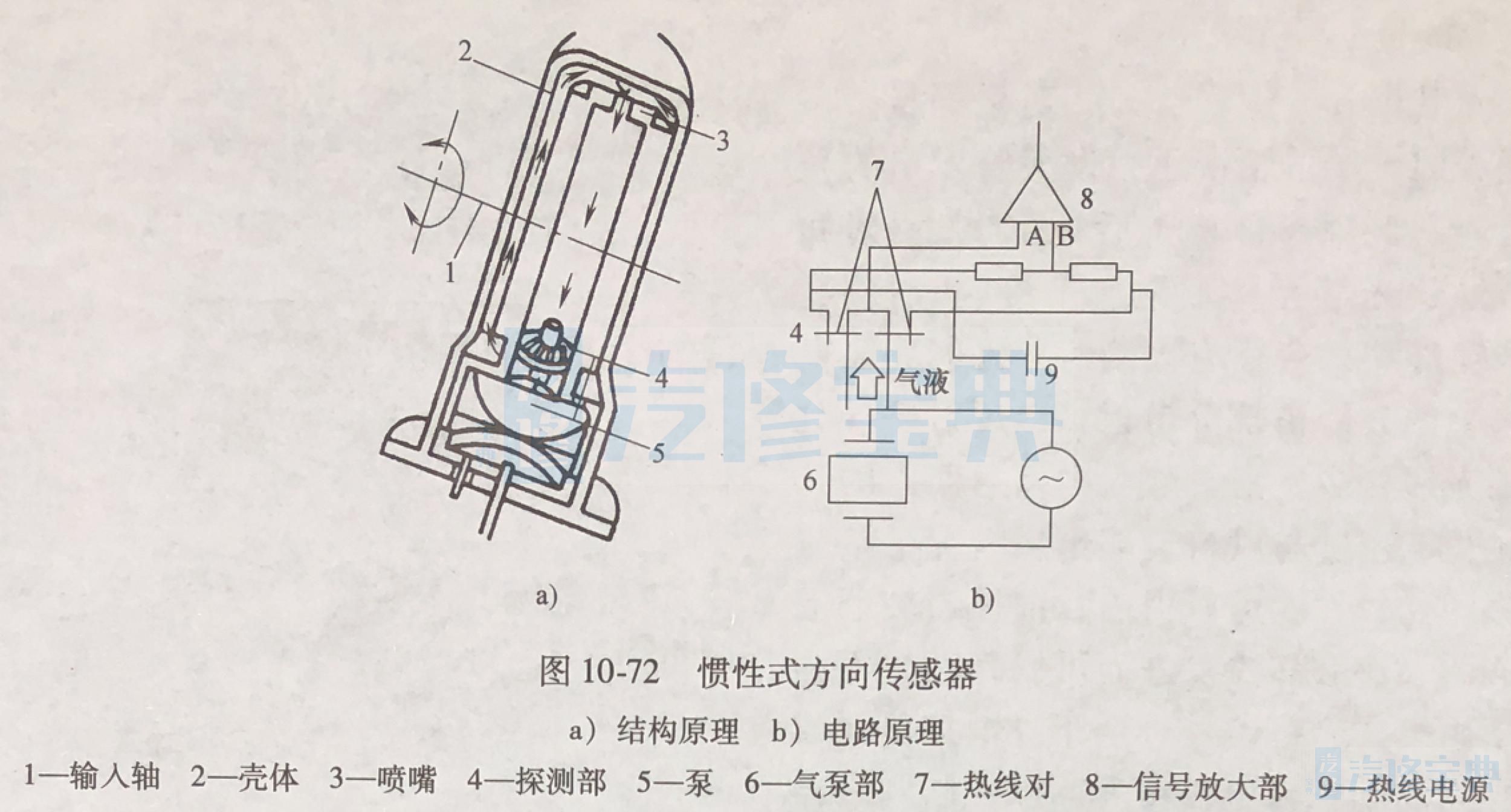
在日本丰田公司的惯性行驶系统中,采用氦气的惯性检测方位,而不是利用地磁。惯性式方向传感器的结构如图10-72所示。
密封在容器中的氦气在压电振子的一侧,这使得固定在汽车上检测器的两根热线冷却程度不同而产生温度差,并形成电位差。两热线与两个常值电阻连接成电桥电路(图10-72b),从A、B两点输出电压,并通过电压放大器放大后输送给ECU。传感器的输出电压与汽车偏转率成正比,ECU根据传感器输出的电压信号可判断出汽车的方向。