激光雷达是以发射激光束来探测目标位置的雷达系统,其功能包含搜索和发现目标;测量其距离、速度、角位置等运动参数;测量目标反射率、散射截面和形状等特征参数。 激光雷达根据扫描机构的不同,有二维和三维两种。它们大部分都是靠旋转的反射镜将激光发射出去并通过测量发射光和从障碍物表面反射光之间的时间差来测距,三维激光雷达的反射镜还附加一定范围内俯仰,以达到面扫描的效果。 二维激光雷达和三维激光雷达在先进驾驶辅助系统上得到了广泛应用。与三维激光雷达相比,二维激光雷达只在一个平面上扫描,结构简单,测距速度快,系统稳定可靠;但二维激光雷达用于地形复杂、路面高低不平的环境时,由于它只能在一个平面上进行单线扫描,故不可避免会出现数据失真和虚报的现象。同时,由于数据量有限,用单个二维激光雷达也无法完成越野环境下的地形重构。 一、激光雷达的特点。 激光雷达以激光作为载波,激光是光波波段电磁辐射,波长比微波和毫米波短得多。激光雷达具有以下特点。 ①全天候工作,不受白天和黑夜的光照条件的限制。 ②激光束发散角小,能量集中,有更好的分辨率和灵敏度,探测精度高。 ③可以获得幅度、颗率和相位等信息,且多普勒频移大,可以探测从低速到高速的目标。 ④抗干扰能力强,隐蔽性好,激光不受无线电波干扰,能穿透等离子鞘套,低仰角工作时,对地面的多路径效应不敏感。 ⑤激光雷达的波长短,可以在分子量级上对目标探测且探测系统的结构尺寸可做的很小。 ⑥激光雷达具有三维建模功能,能够检测周围360°所有物体。
二、激光雷达的组成。
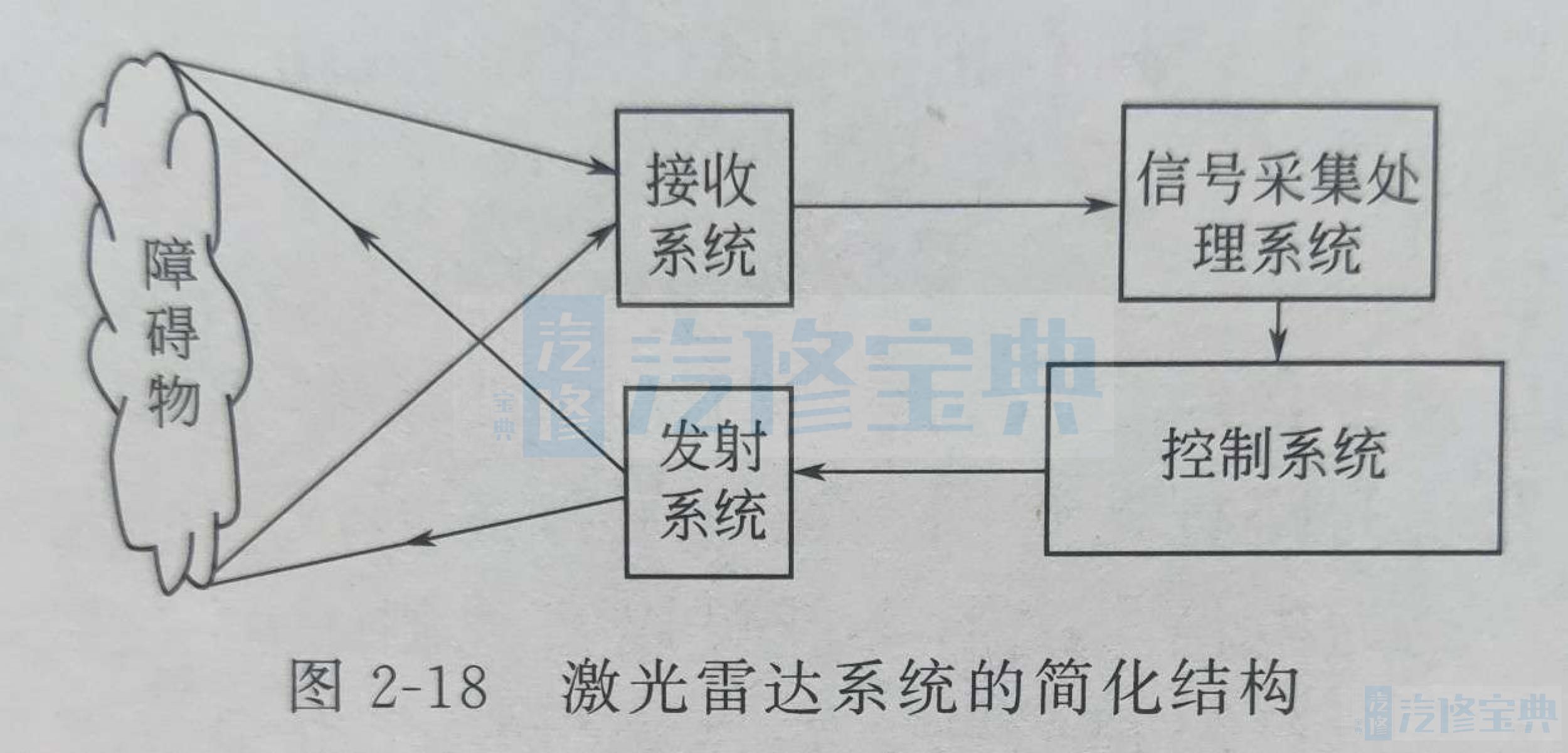
激光雷达是由激光发射系统、光电接收系统、信号采集处理系统、控制系统等组成,其简化结构如图2-18所示。
激光雷达发射系统主要负责向障碍物发出激光信号;接收系统主要负责接收经障碍物反射之后回来的激光信息:信号采集处理系统主要负责将接收回来的信号进行处理,使它能够符合下一级系统的要求,它是激光雷达系统最关键的环节,将直接影响激光雷达系统的测量精度:控制系统主要作用是提供信号并且对接收回来的信号进行数据处理。
2.干涉测距法。
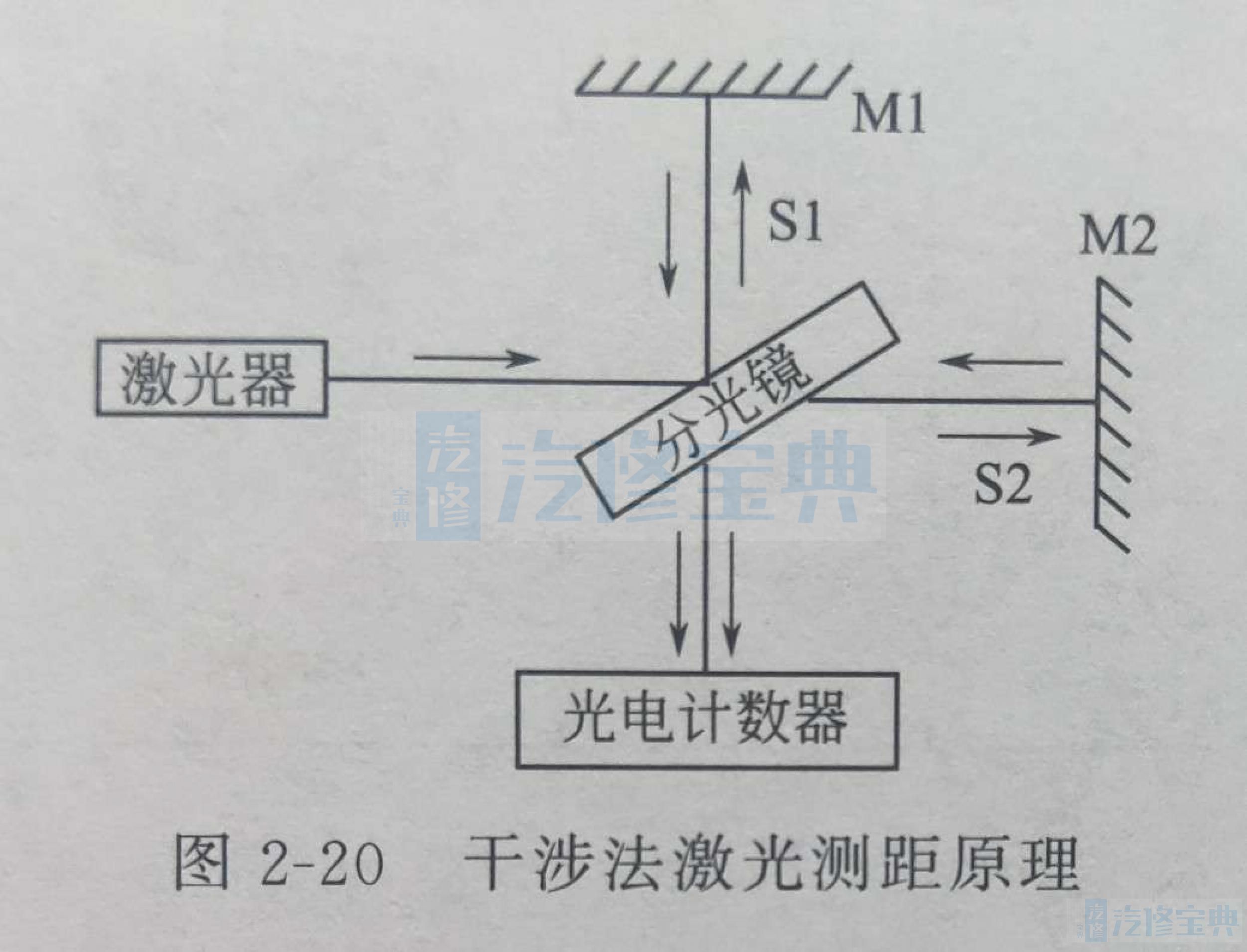
干涉测距法的基本原理是利用光波的干涉特性实现距离的测量。根据干涉原理,产生干涉现象的条件是两列有相同频率、相同振动方向的光相互叠加,并且这两列光的相位差固定。
干涉测距法原理如图2-20所示,激光器发射出一束激光,通过分光镜分为两束相干光波,两束光波各自经过反射镜M1和M2反射回来,在分光镜处又汇合到一起。由于两束光波的路程差不同,通过干涉后形成的明暗条纹也不同,所以传感器将干涉条纹转换为电信号之后,就可以实现测距功能。
干涉法测距技术虽然已经很成熟,并且测量精度也很好,但是它一般是用在测量距离的变化中,不能直接用它测量距离,所以干涉测距一般应用于干涉仪、测振仪、陀螺仪中。
3.相位测距法。
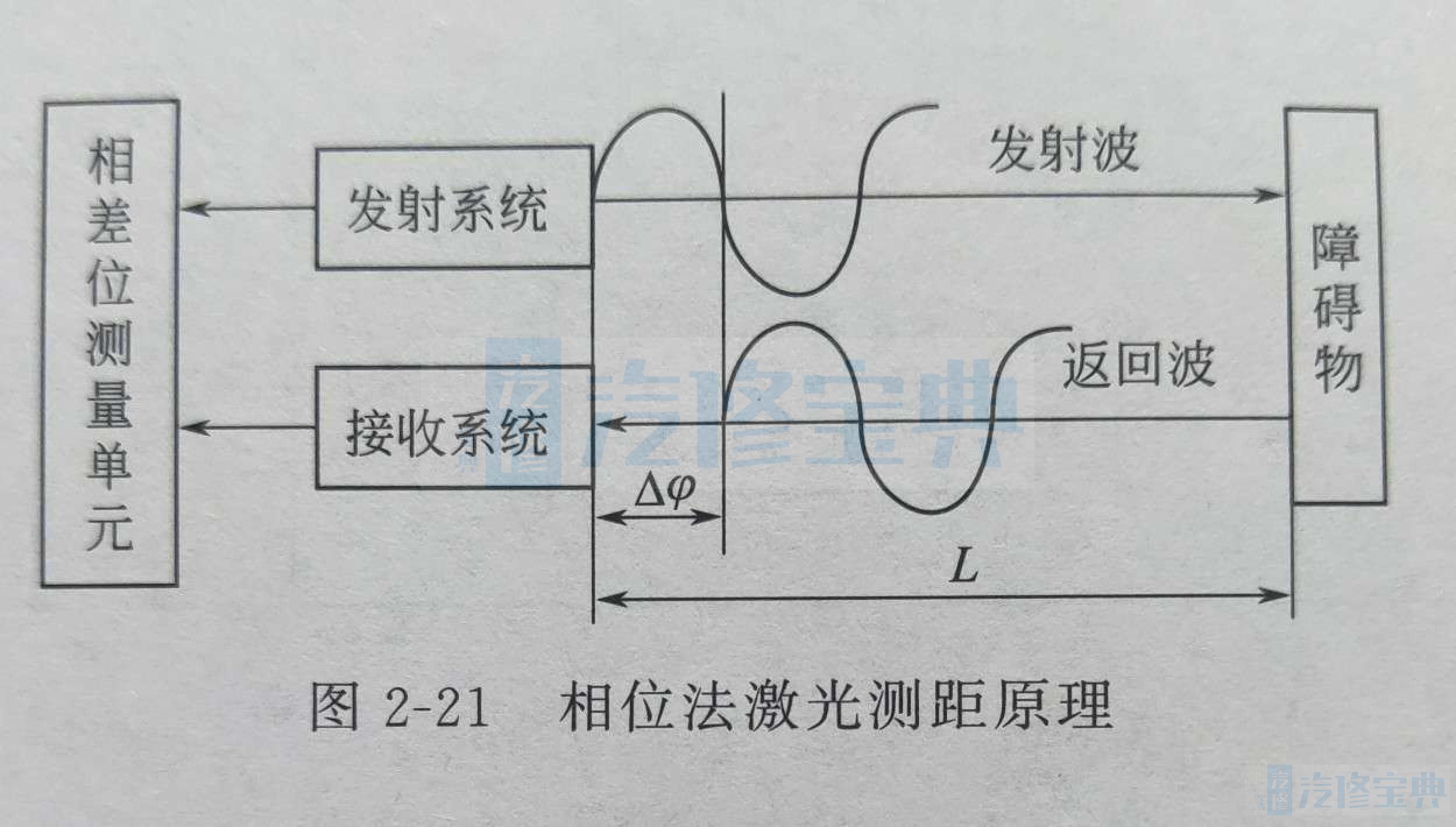
相位测距法的原理是利用发射波和返回波之间所形成的相位差来测量距离的。首先,经过调制的频率通过发射系统发出一个正弦波的光束,然后,通过接收系统接收经过障碍物之后反射回来的激光。只要求出这两束光波之间的相位差,便可通过此相位差计算出待测距离。相位法激光测距原理如图2-21所示。
激光从发射到接收的时间为
式中,t为激光从发射到接收的时间:△ψ为发射波和返回波之间的相位差;
w为正弦波角频率;f为正弦波频率。
待测距离为:
相位测距法由于其精度高、体积小、结构简单、昼夜可用的优点,被公认为是最有发展潜力的距离测量技术。相比于其他类型的测距方法,相位测距法朝着小型化、高稳定性、方便与其他仪器集成的方向发展。
四、激光雷达的应用。
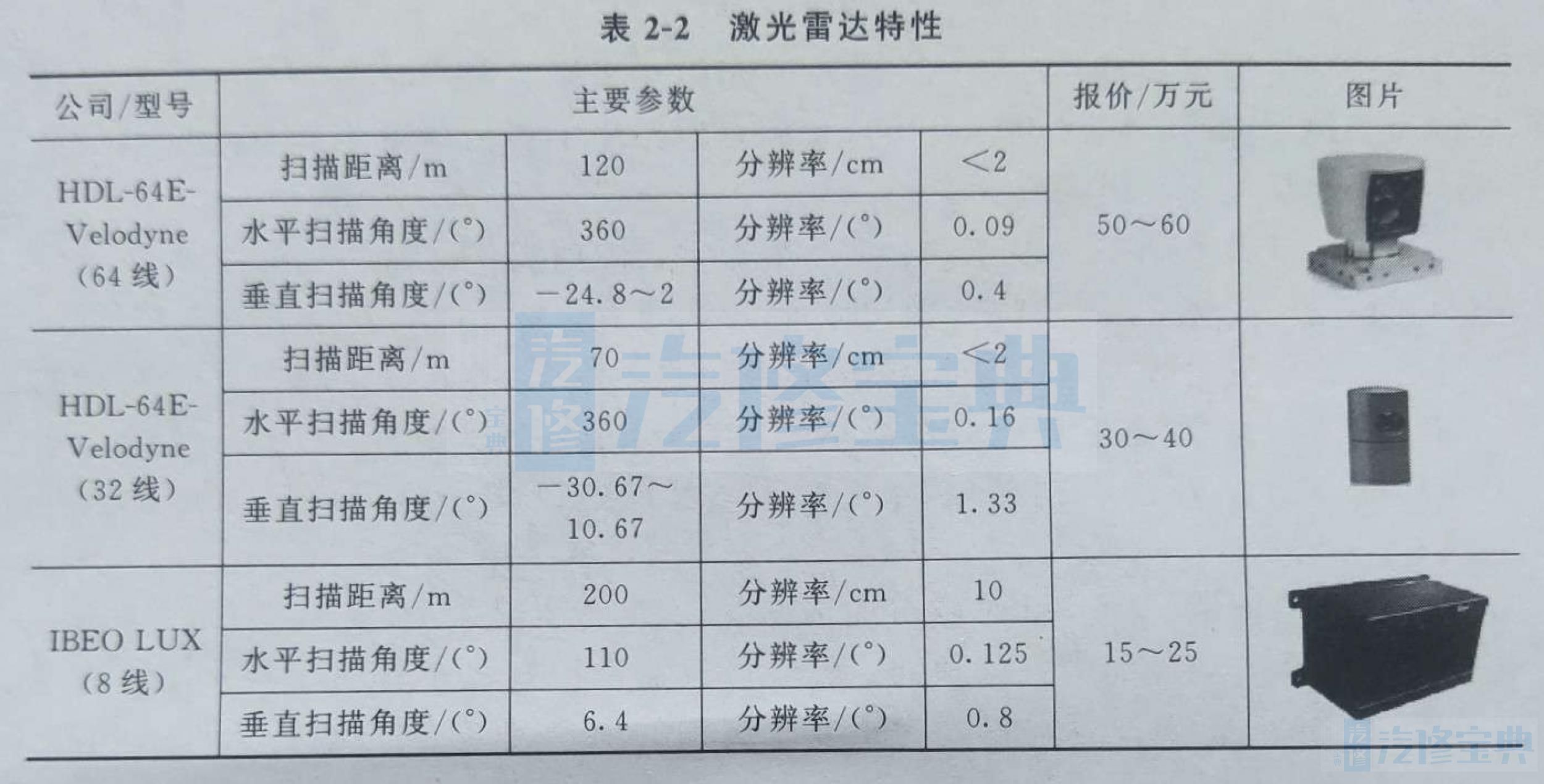
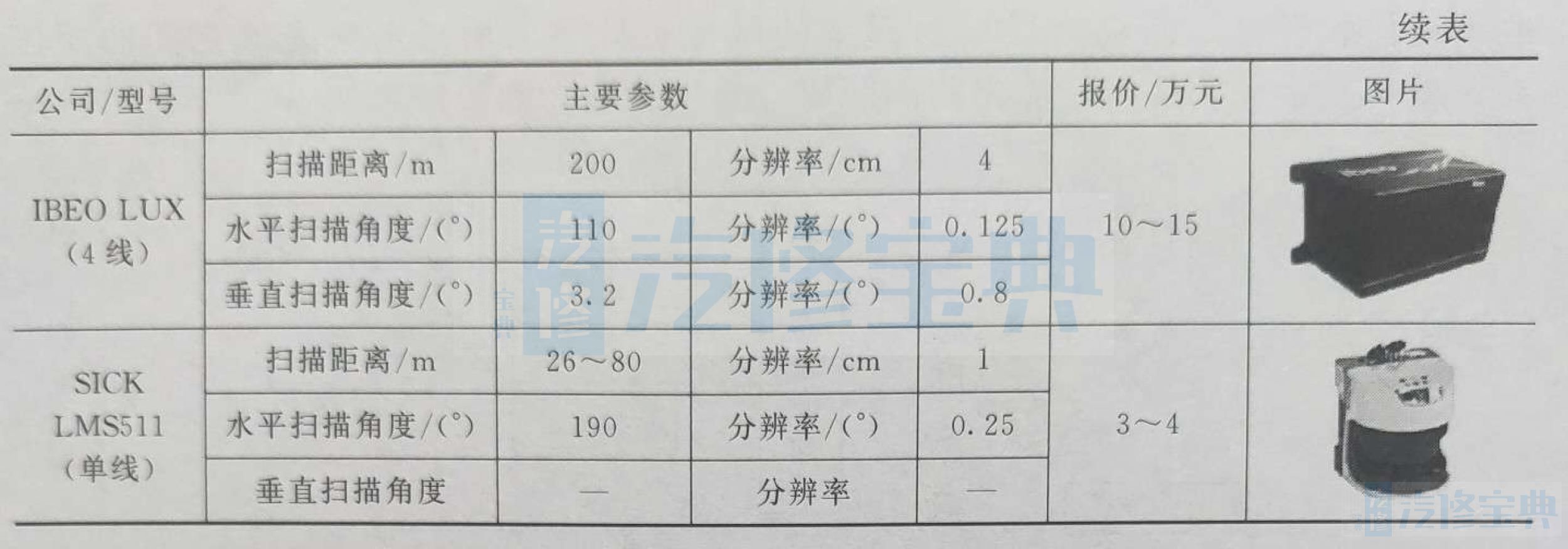
目前,汽车上应用的激光雷达主要型号见表2-2,表中报价仅供参考。
IBEO LUX(4线)激光雷达是德国IBEO公司借助高分辨率激光测量技术,推出第一款多功能的汽车智能传感器。它拥有110°的宽视角,0.3~200m的探测距离,绝对安全的1等级激光。
在有限的空间内,集7种功能和低成本于一体,能轻松应对路面上的多种危险交通路况,轻易集成到任何车体并观察到任何角度。因此,LUX(4线)激光雷达不仅保证了使用的便利性,而且提高了安全性。
LUX(4线)激光雷达不仅输出原始扫描数据,同时输出每个测量对象的数据,如位置、尺寸、纵向速度、横向速度等,拥有远距离、智能分辨率、全天候等能力,结合110°的宽视角,在以下7个方面拥有出色的性能。
(1)行人保护:当一个人出现在车辆行驶的前方路面上,需要车辆提供保护的场合。LUX(4线)激光雷达能检测0.3~30m视场范围内所有行人。通过分析对象的外形、速度和腿部移动来区分行人与普通物体,传感器在启动安全保护措施(如安全气囊)前300ms时发出警告,这样便可在发生碰撞之前保护行人。
(2)自适应巡航控制系统的启和停:基于LUX(4线)激光雷达的自适应巡航控制系统可在0~200km/h的速度范围内实现自动行驶,可在没有驾驶员帮助的情况下自动调整车速,如有必要,刹车停行。宽视场范围使得它能及时地检测到并线的车辆,并且快速判断它的横向速度。
(3)车道偏离预警:LUX(4线)激光雷达可以检测车辆行驶前方的车道线标识和潜在的障碍,同时也可以计算车辆在道路中的位置。如果车辆可能会偏离航线,系统会立即发出预警。
(4)自动紧急刹车:LUX(4线)激光雷达实时检测车辆行驶前方的所有静止的和移动的物体,并且判断它们的外形,当要发生危险时,自动紧急刹车。
(5)预碰撞处理:通过分析所有的环境扫描数据,不管是即将发生什么样的碰撞(如擦碰),预碰撞功能会在碰撞发生前100ms发出警告。LUX(4线)激光雷达能计算出碰撞的初始接触点并且采取措施以减小碰撞,提前启动安全系统。
(6)交通拥堵辅助:针对城市拥堵路况,LUX(4线)激光雷达能够在上下班路上消除频繁启停而带来的烦恼。驾驶员只需掌握好汽车转向盘,该功能在速度小于30km/h的路况下显得尤为重要。缓和的加/减速度和可靠行人保护功能,使车辆驾驶既安全又省心。
(7)低速防碰撞功能:行驶途中,哪怕是一小会儿的分神也有可能导致事故的发生,引入低速防碰撞功能,使得以前在30km/h时速下时常发生的类似事故不再发生,LUX(4线)激光雷达检测并分析前方的路况,车辆会在发生碰撞前自动停驶。