(1)安装位置识别: 霍尔式转矩传感器是利用霍尔效应原理,将驾驶员施加在方向盘上的力矩转换为电信号输送给转向控制ECU。奥迪A6、A7、Q5、Q7等车系采用的霍尔式转矩传感器安装在转向机构主动齿轮上,如图9-19所示。
(2)结构与原理:
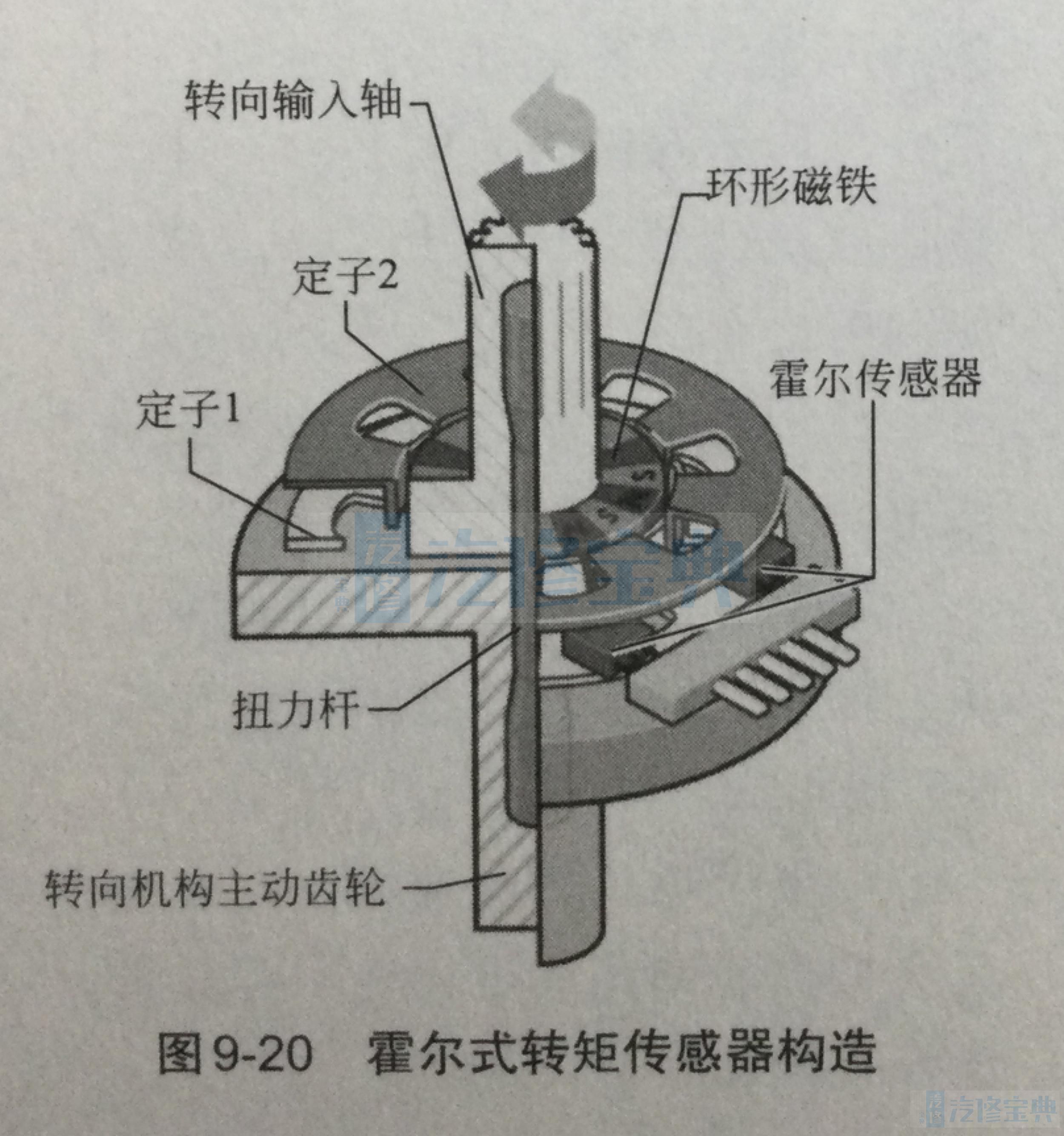
霍尔式转矩传感器结构如图9-20所示,主要由环形磁铁、定子1和定子2、霍尔传感器等组成。
在转向力矩传感器上,转向输入轴和转向机构主动齿轮是通过一根扭力杆连接起来的。该扭力杆有一定的抗扭能力。
转向输入轴上有个16极环形磁铁(8个极对),该磁铁与转向输入轴一同转动。
转向机构主动齿轮上有两个定子,每个定子8个齿,定子与转向机构主动齿轮一同
转动。在初始位置时,定子上的这些齿正好位于环形磁铁上相应的南极和北极之间。霍尔传感器与壳体刚性连接,不随着转动。
该传感器工作时是非接触式的,它利用磁阻效应原理来工作。定子1和定子2之间磁通量强度和方向就是转向力矩的直接量度,由两个霍尔传感器(冗余布置)来测量。根据所施加的转向力矩大小(其实就是扭转角大小),霍尔传感器的信号就在零位和最大位置之间变动。
①零位。转矩传感器在零位时,定子1和定子2的齿正好位于两磁极之间,如图9-21(a)所示。因此,定子1和定子2都不是朝南或朝北。在这两个定子之间没能建立起磁场。这两个霍尔传感器采用5V的输入电压供电。由于在这两个定子之间没能建立起磁场,因此这两个霍尔传感器输出电压为2.5V,这表示转矩为零,如图9-21(b)所示。
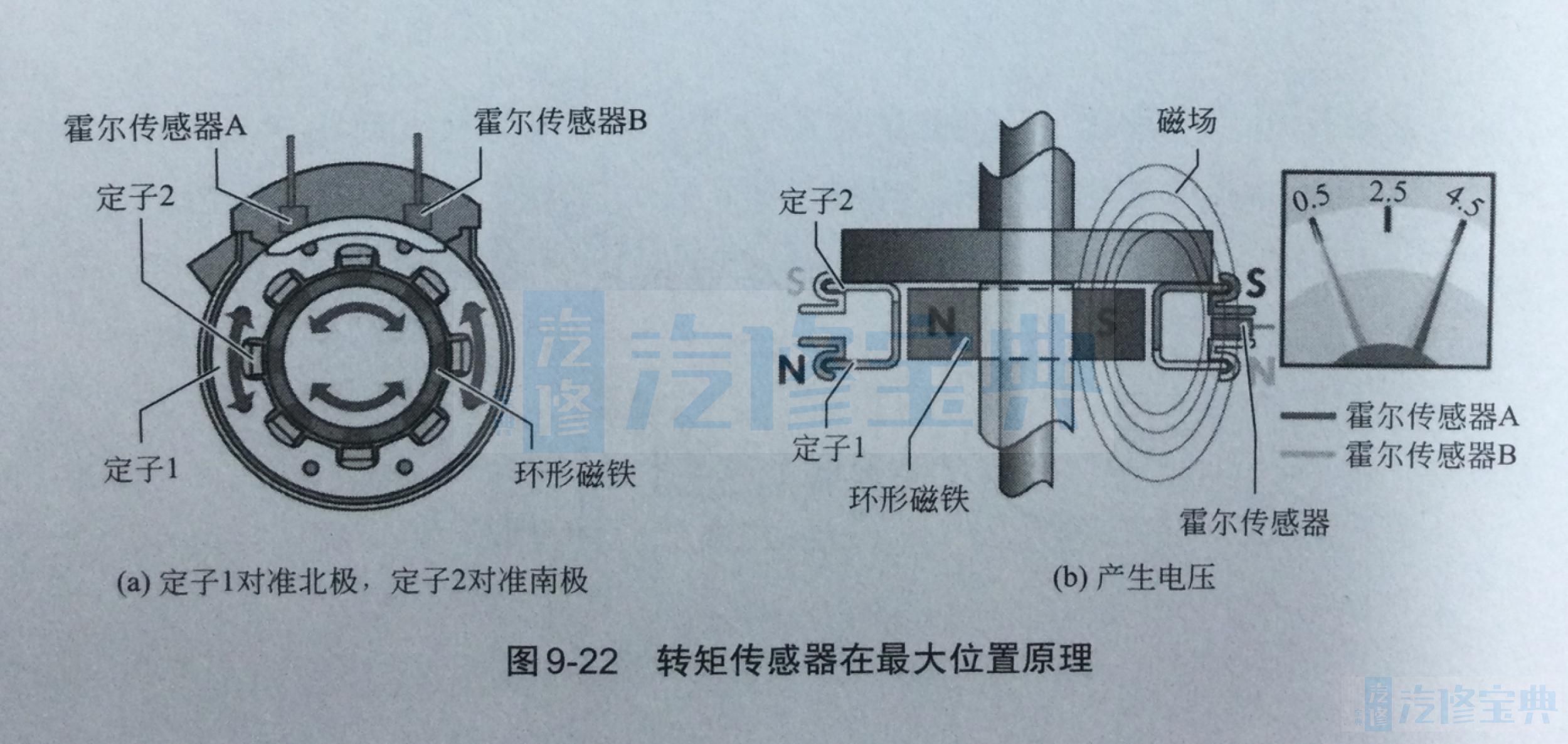
②最大位置。如果转动了方向盘,那么转向输入轴和转向机构主动齿轮之间就会产生一个扭转角,环形磁铁相对于定子1和2就扭转了。如果定子1的8个齿正好在环形磁铁的北极上,同时定子2的8个齿正好在环形磁铁的南极上,那么传感器就是在最大位置上了。这就是说,定子1对准北极了,而定子2对准南极了如图9-22(a)所示。
此时两个定子之间会建立起磁场,霍尔传感器会侦测到这个磁场并将其转换成电信号,如图9-22(b)所示。
如果霍尔传感器A输出4.5V最大电压,那么霍尔传感器B就输出0.5V最小电压。如果方向盘转动方向与此相反,那么霍尔传感器A输出0.5V,而霍尔传感器B输出4.5V。
如果转矩传感器损坏,则必须更换转向器了。电控单元识别出故障,控制单元会根据转向角和电机转子角计算出一个转向力矩替代信号。转向助力功能将逐渐被关闭。