对于多传感器融合,有很多种组合和选择。 (1)激光雷达与视觉传感器融合激光雷达和视觉传感器融合是一个经典方案。在无人驾驶应用中,视觉传感器价格便宜,但是受环境光影像较大,可靠性相对较低;激光雷达探测距离远,对物体运动判断精准,可靠性高,但价格高视觉传感器可进行车道线检测、障碍物检测和交通标志的识别;激光雷达可进行路沿检测、动态和静态物体识别、定位和地图创建。对于动态的物体,视觉传感器能判断出前后两帧中物体或行人是否为同一物体或行人,而激光雷达则得到信息后测算前后两帧间隔内的运动速度和运动位移。 视觉传感器和激光雷达分别对物体识别后,再进行标定。对于安全性要求100%的无人驾驶汽车,激光雷达和视觉传感器融合将是未来互补的方案。 (2)激光雷达和毫米波雷达融合激光雷达和毫米波雷达融合是新的流行方案。毫米波雷达已经成为ADAS的核心传感器,它具有体积小、质量轻和空间分辨率高的特点,而且穿透雾、烟、灰尘的能力强,弥补了激光雷达的不足。 但毫米波雷达受制于波长,探测距离有限,也无法感知行人,并且对周边所有障碍物无法进行精准的建模,而这恰恰是激光雷达的强项。激光雷达和毫米波雷达,不仅可以在性能上实现互补,还可以大大降低使用成本,可以为无人驾驶的开发提供一个新的选择。 (3)视觉传感器和毫米波雷达融合将视觉传感器和毫米波雷达进行融合,相互配合共同构成智能网联汽车的感知系统,取长补短,实现更稳定可靠的
ADAS功能。视觉传感器与毫米波雷达融合具有以下优势。
①可靠性。目标真实,可信度提高。
②互补性。全天候应用与远距离提前预警。
③高精度。大视场角、全距离条件下的高性能定位。
④识别能力强。对各种复杂对象都能够识别。
在智能驾驶场景下,视觉传感器与毫米波雷达的数据融合大致有3种策略图像级、目标级和信号级。图像级融合是以视觉传感器为主体,将毫米波雷达输出的整体信息进行图像特征转化,然后与视觉系统的图像输出进行融合;目标级融合是对视觉传感器和毫米波雷达输出进行综合可信度加权,配合精度标定信息进行自适应的搜索匹配后融合输出;信号级融合是对视觉传感器和毫米波雷达传出的数据源进行融合。信号级别的融合数据损失最小,可靠性最高,但需要大量的运算。
传感器融合仿真技术实例例2-9 利用毫米波雷达和视觉传感器融合进行检测。
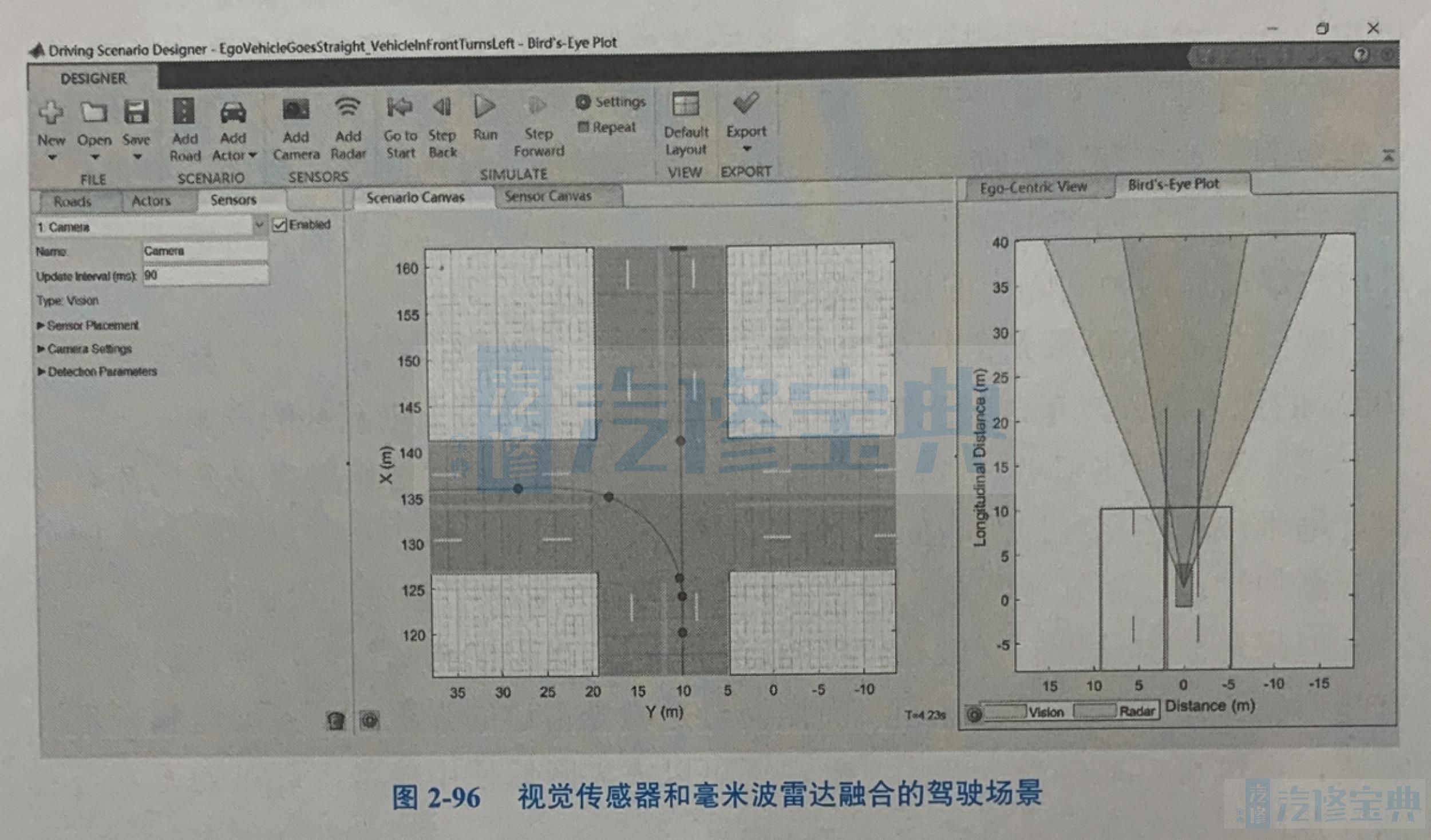
解:在 MATLAB的场景库中导入“ EgoVehicleGoesStraight VehiclelnFront-TurnsLeft.mat”的驾驶场景,如图2-96所示。该驾驶场景表示主车自南向北行驶,直行穿过十字路口;另一辆在主车前面的车,在十字路口左转弯行驶。
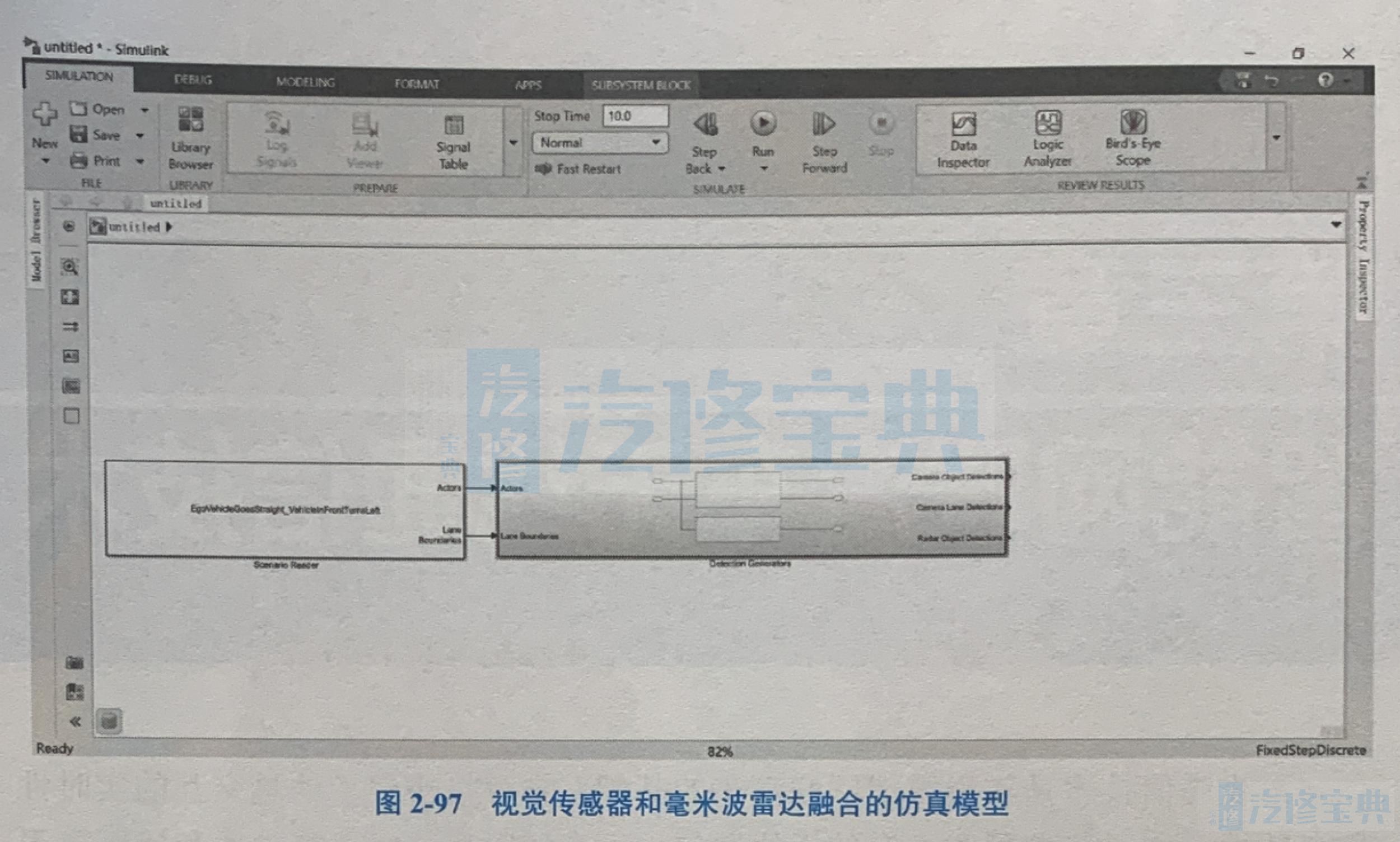
通过选择 Export> Export Simulink model从应用程序中生成仿真模型,如图2-97所示。
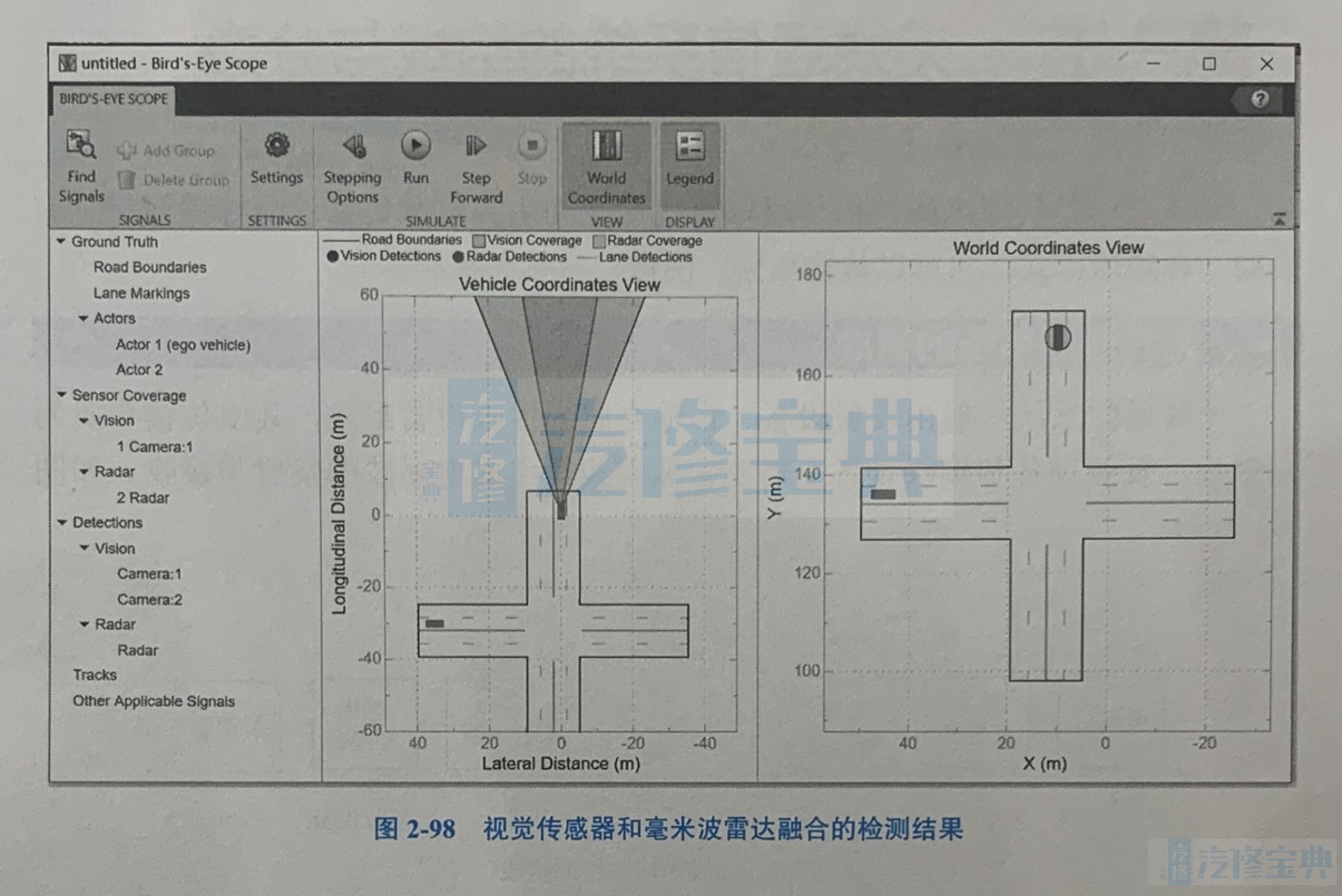
从 Simulink工具栏中单击“ Birds-Eye Scope”,打开鸟瞰图,单击“FindSignals”,点击“Run”,车辆开始运动并进行检测,毫米波雷达和视觉传感器融合检测车辆和车道线,如图2-98所示。检测结果储存在 MATLAB的工作区。