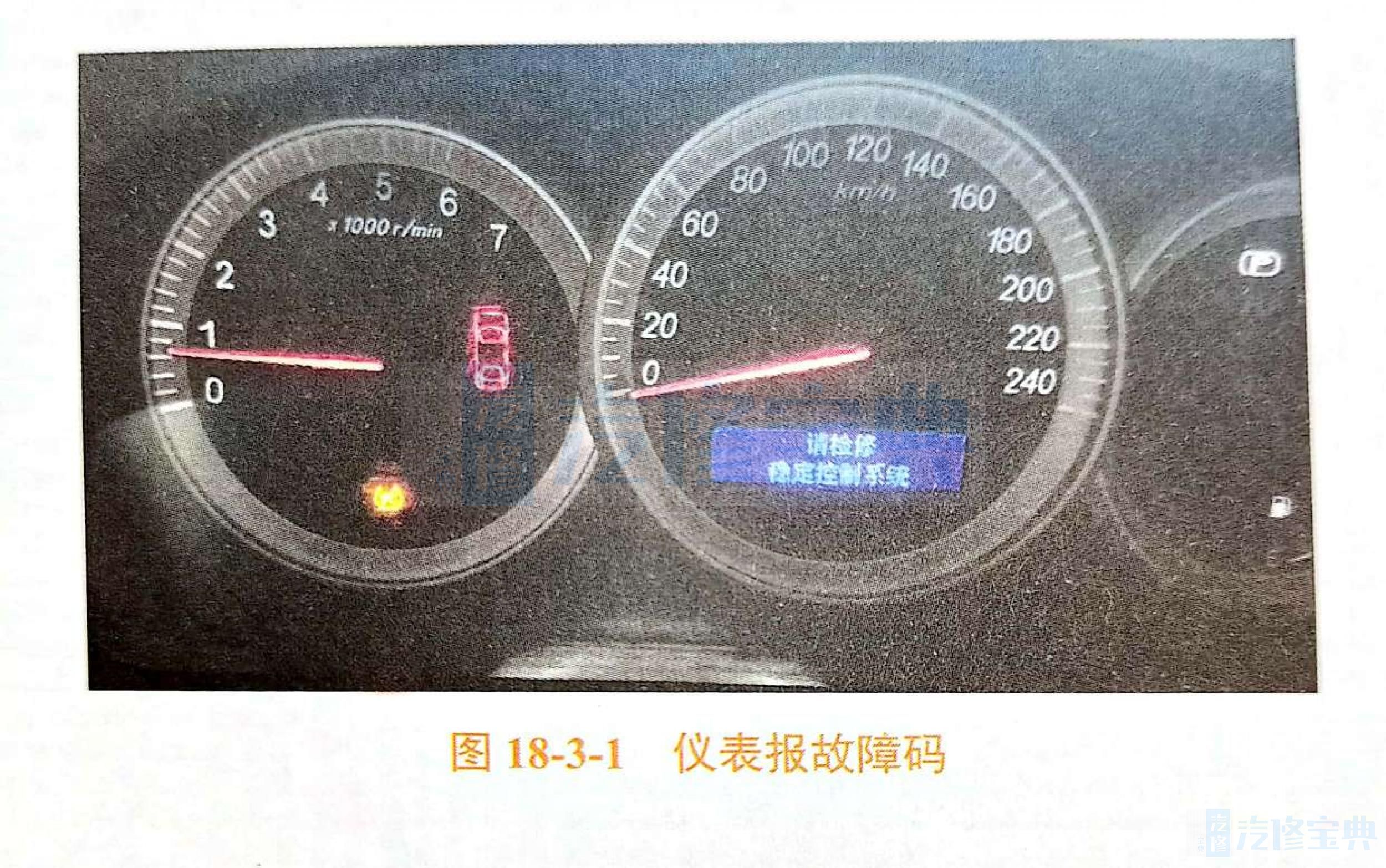
(1)车辆信息: 车型:2006年款别克君越。发动机:2.4升。行驶里程:170000公里。(2)故障现象: 仪表TC故障灯点亮,仪表显示屏显示“请检修稳定控制系统”,并且只要里程表公里数超过1000公里,就从0公里开始计数,小公里数一清零,大公里数就清零(图18-3-1)。
(3)故障诊断与排除:
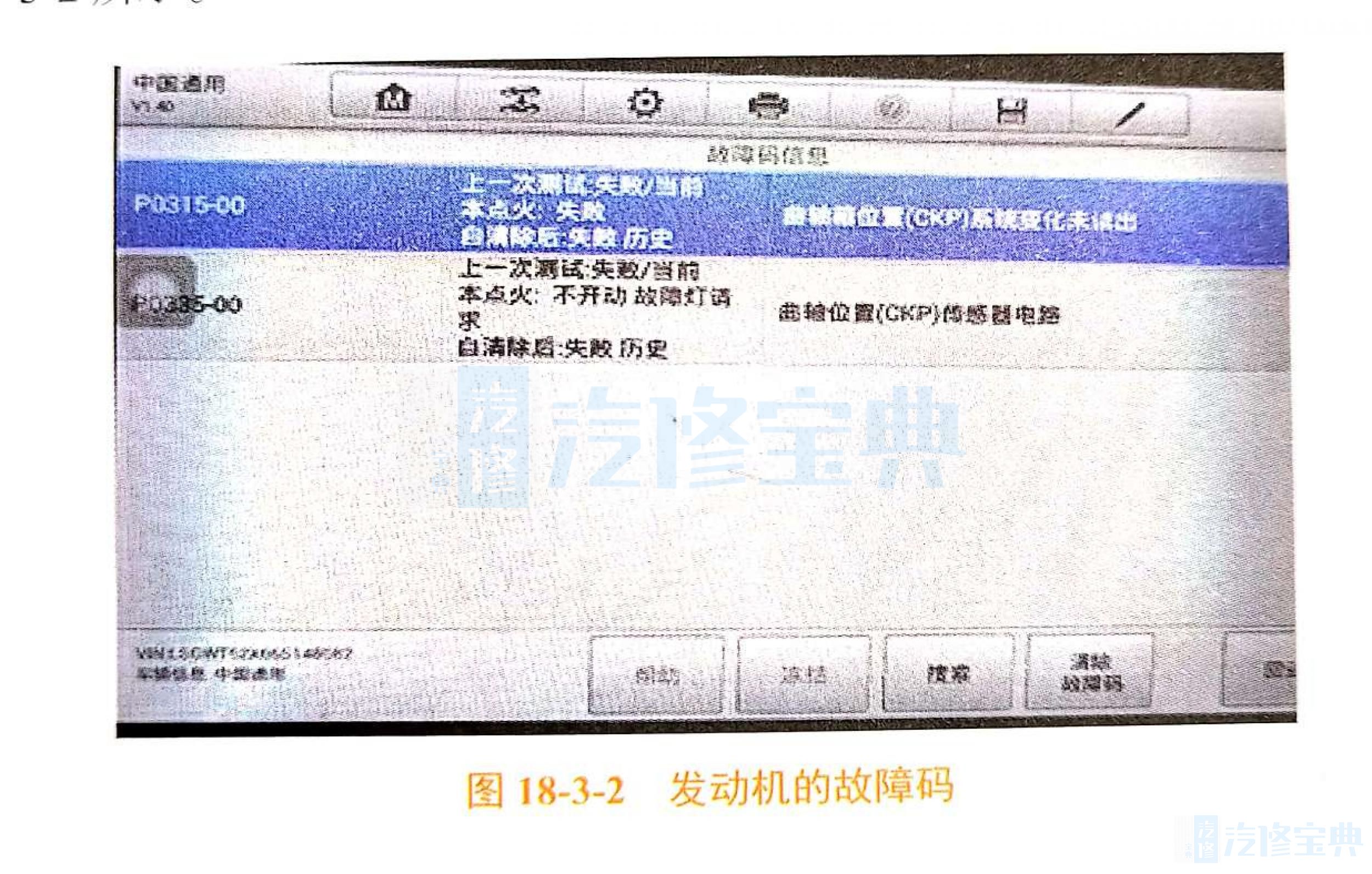
接车后司机只是反映该车亮TC灯,并且仪表显示“请检修稳定控制系统”其他无维修历史。先接上诊断仪,读取该车的故障码,读取到发动机的故障码如图18-3-2所示。
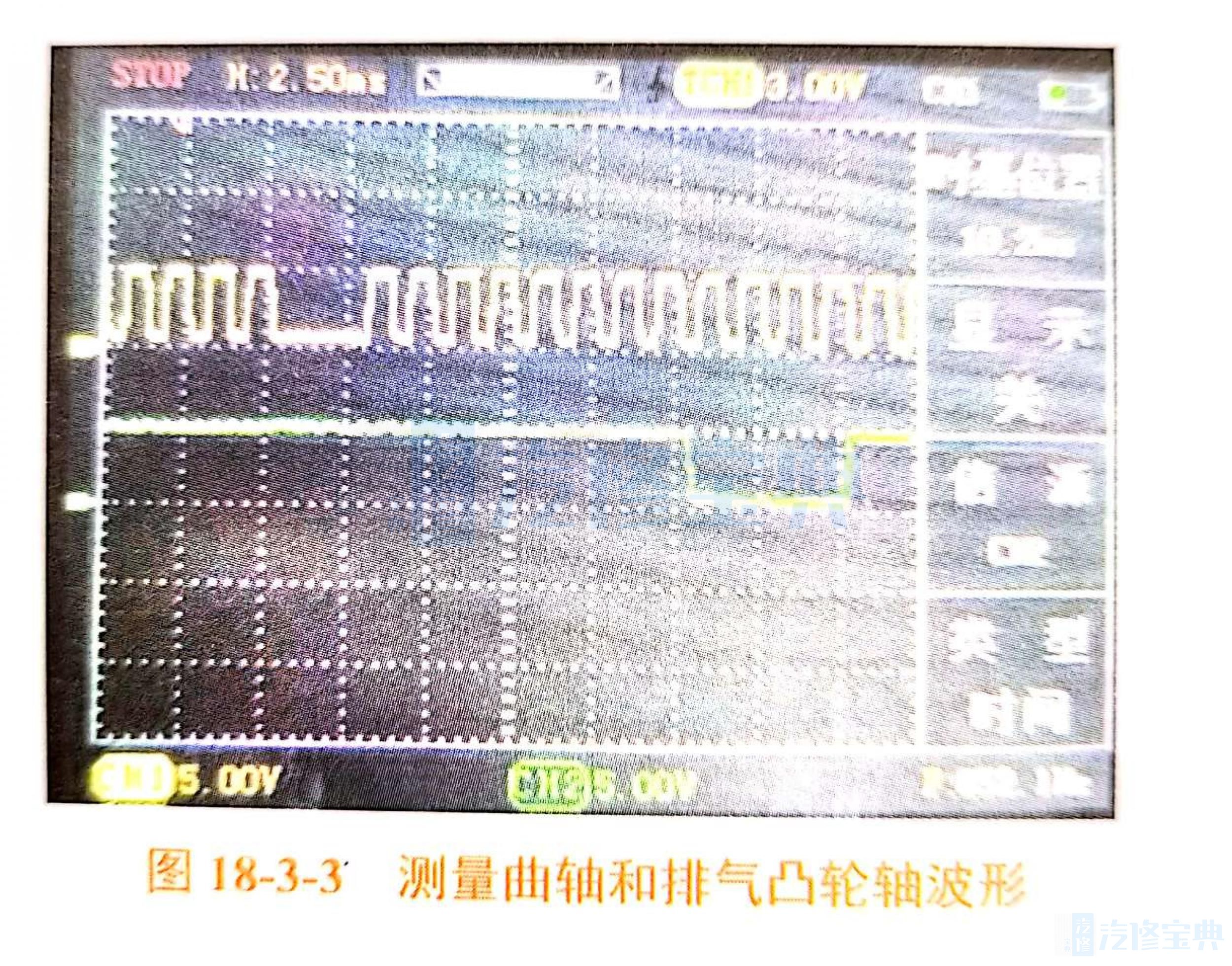
然后便对曲轴位置传感器进行测量,此车的曲轴位置传感器为三线霍尔式传感器,一根接地,一根为5V电源,一根为25V信号。传感器的数据都在正常范围内,于是用示波器对曲轴位置传感器和排气凸轮轴位置传感器进行波形测试,曲轴和排气凸轮轴波形如图18-3-3所示
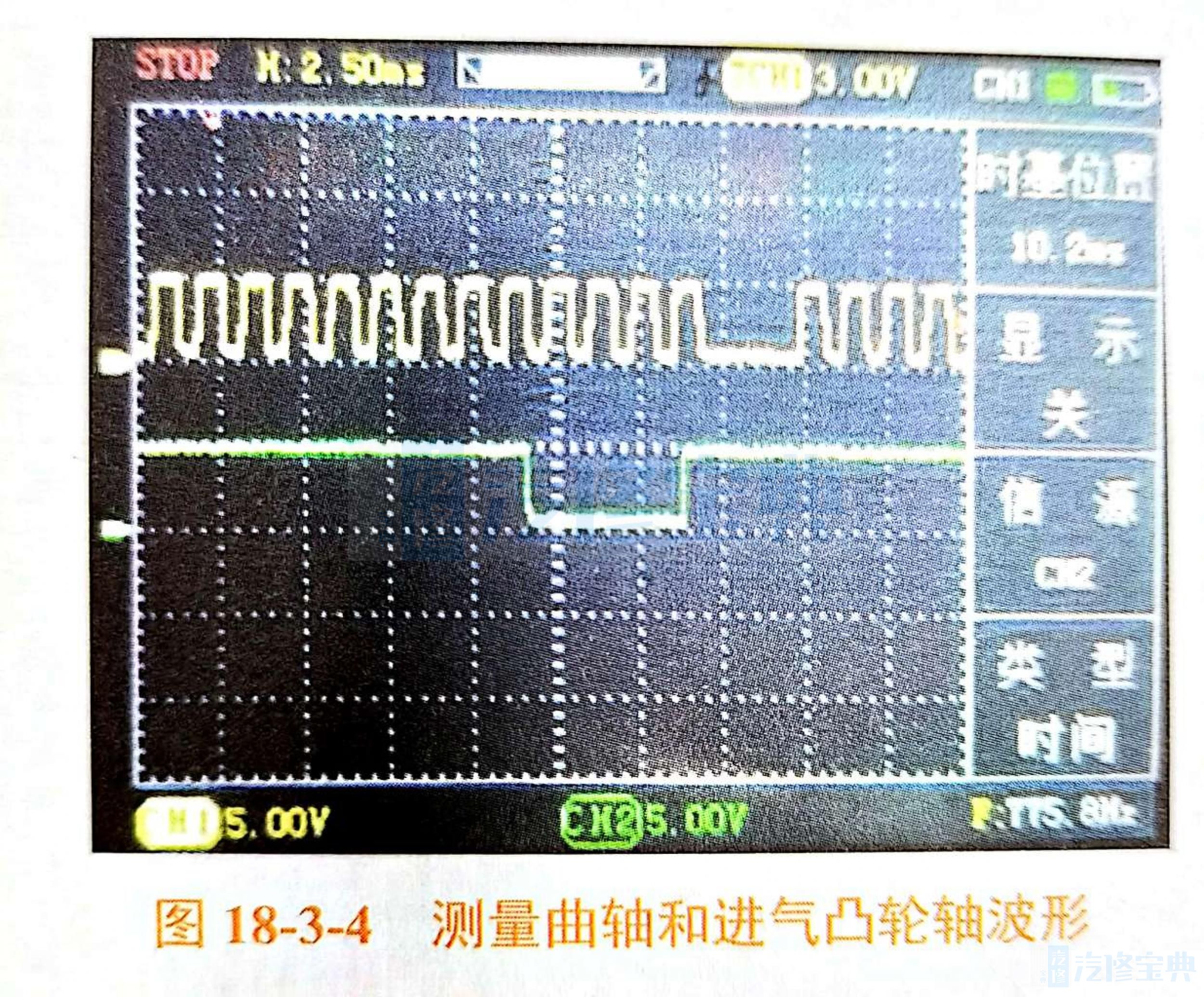
曲轴和进气凸轮轴波形如图18-3-4所示
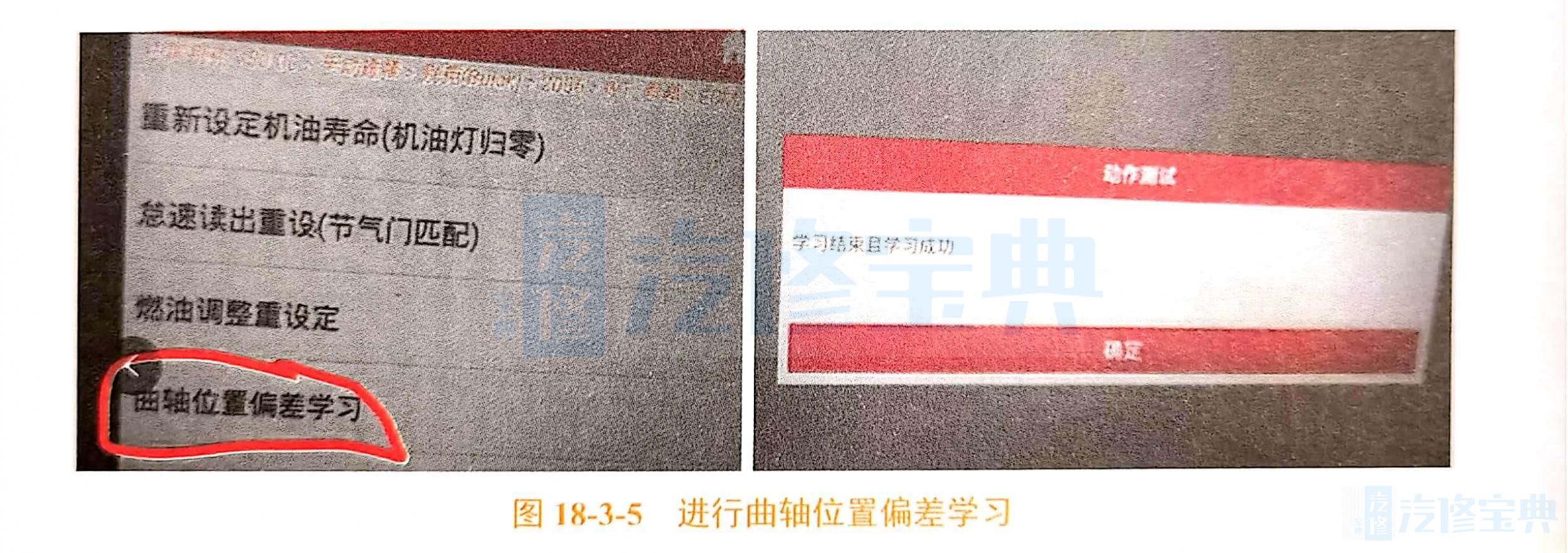
然而从波形和电压中可知该车的正时及信号电压都在正常范围内,便使用诊断仪对该车进行了曲轴位置偏差学习(图18-3-5)
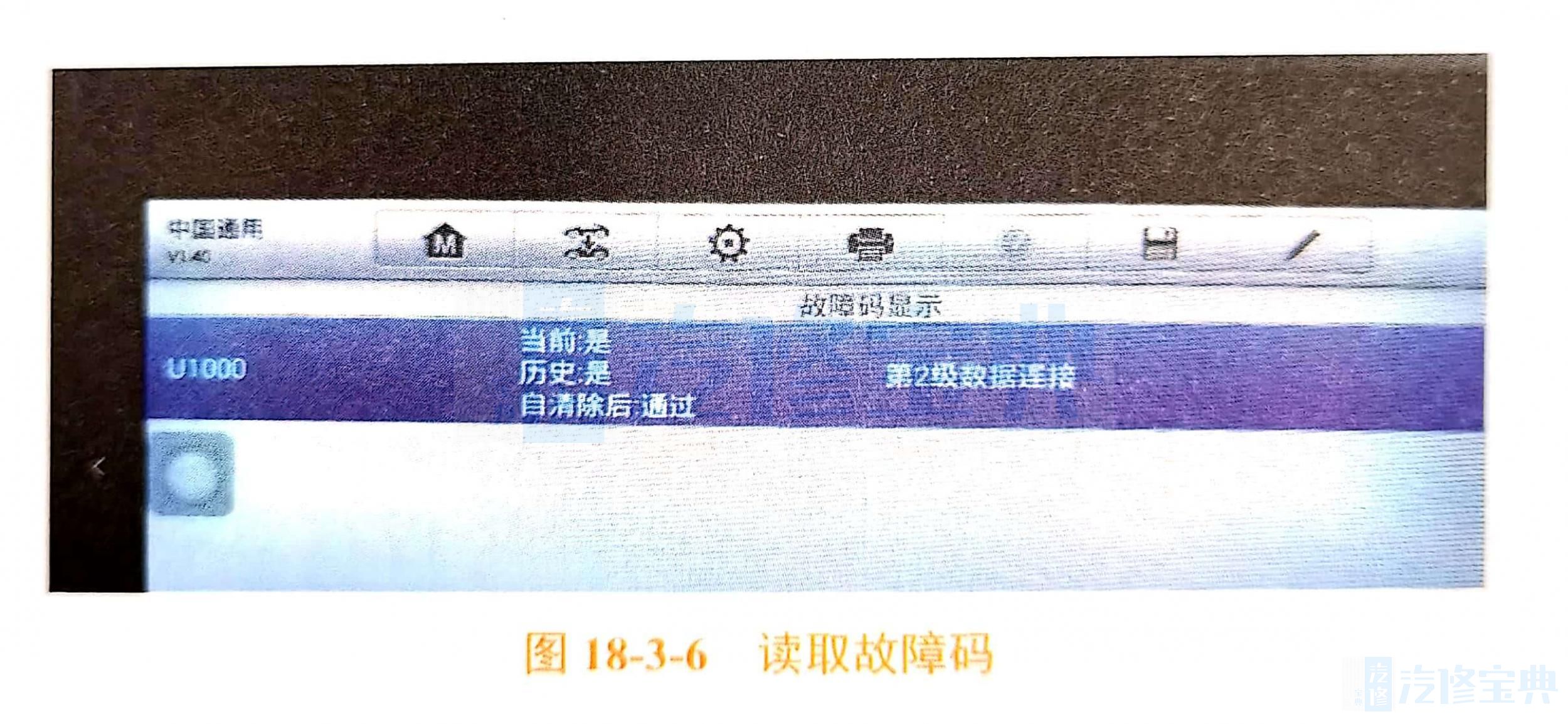
学习完后该故障码可以清除,不再出现但是仪表内TC故障灯依然点亮,路试读取ABS四个轮胎转速一致,没发见稳定系统有异常数据,再次读取故障码时,只有仪表显示第二级数据连接故障图18-3-6)
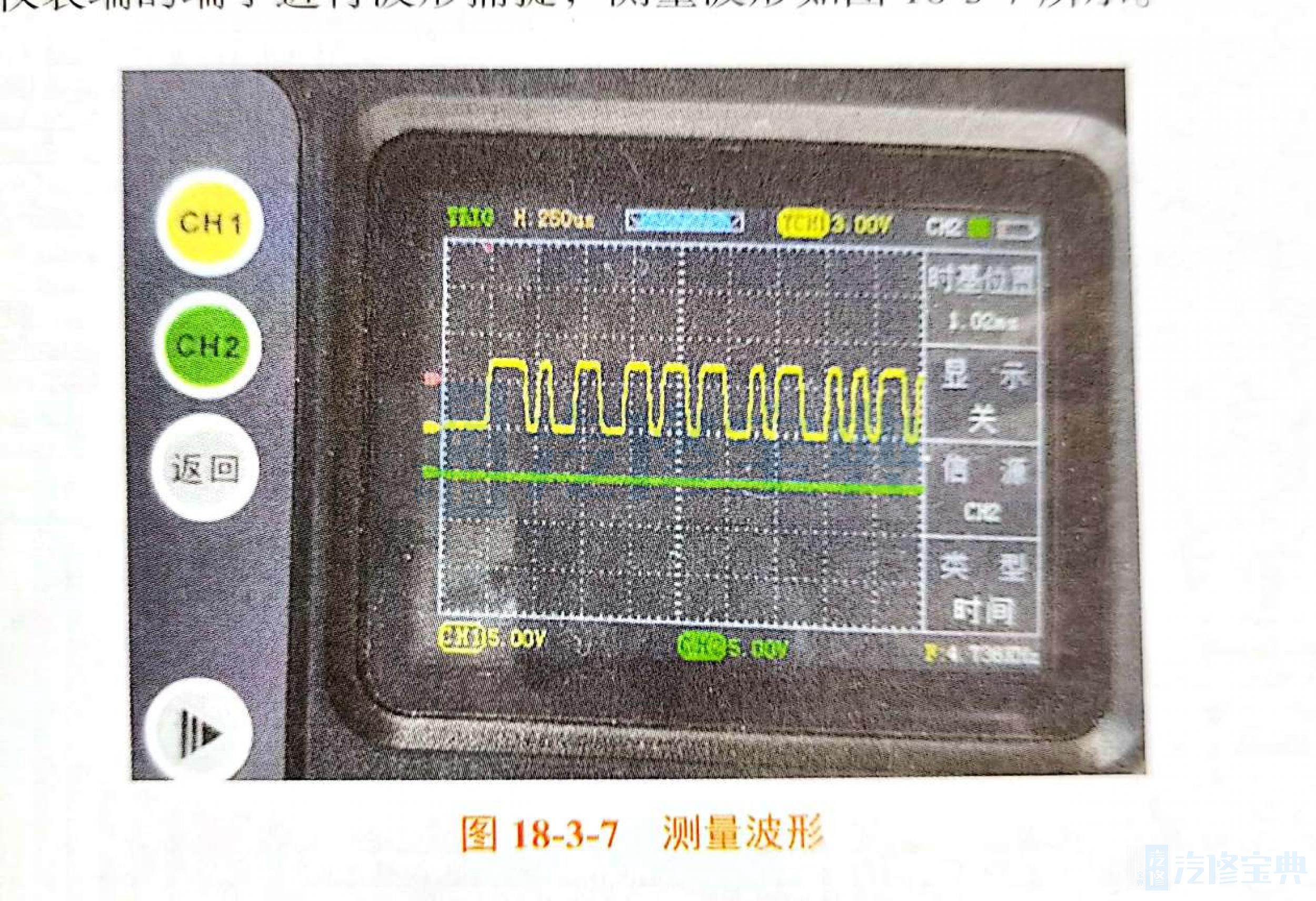
查看相关的资料后,便对此条数据总线进行了测量,电压为9V左右,然后对总线的结点到仪表端的端子进行波形捕捉,测量波形如图18-3-7所示。
波形正常,即可对外围线路进行故障排除。再次仔细读取该车的牵引数据值时,发现数据的牵引力控制系统警告灯是关闭的,而仪表却依然点亮引力控制系统警告灯因此判断为仪表问题,更换仪表。
更换仪表后对仪表的里程数据进行改写,多次试车后故障解决
(4)案例总结:
此类车型仪表有个通病就是数据在7万~9万公里和17万~19万公里这两个阶段数据会错乱,只需要对仪表进行数据改写,把仪表里程数跳过这两个阶段的范围即可。而这辆车曲轴箱位置(CKP)系统的变化未读出是因为其偏差读入功能用来计算由曲轴和曲轴位置传感器的微小公差偏差引起的基准期偏差。计算得到的偏差可使发动机控制模块(ECM)精确地补偿基准期偏差,从而使发动机控制模块能在更宽的发动机转速和负荷范围内检测缺火事件。完成读入程序后,发动机控制模块存储曲轴位置系统偏差值。如果实际曲轴位置偏差不在发动机控制模块中保存的曲轴位置系统偏差补偿值范围内,便会设置该故障码。对外围的线路电压、波形捕捉都在正常范围内,使用诊断仪让发动机ECU对曲轴位置学习一下便可解决。而第二级数据连接故障码是因为连接到 Class2串行数据电路上的模块,在车辆正常工作过程中,会监视串行数据通信情况。操作信息和指令在模块之间相互交换。当个模块接到一条关键的工作参数信息时,该模块会记录信息发送模块的识别号以判断其是否处于正常状态下。关键的工作参数是指,若未收到该参数时,模块必须使用默认值来替代该参数。如果在串行数据通信刚开始的大约前5秒钟时间内,某个模块不能将识别信号与至少一个关键参数进行关联,则设置DTC U1000或者U1255。当多个关键参数与识别信号不关联时,该故障码仅报告一次。出现此类故障时依然要对外围线路进行排查,发现外围线路均在正常范围内,便判断仪表损坏。
为了验证仪表损坏,再次读取牵引数据时发现数据的牵引力控制系统警告灯是关闭的,而仪表却点亮牵引力控制系统警告灯,于是确认是仪表的问题,更换仪表,故障排除。
以后在维修故障时不能只从片面的信息判断故障产生的部件,要从多方面采集故障的数据,对故障进行分析和验证,保证一次性修复率。如果从单方面去判断问题有可能会南辕北辙,浪费更多的时间。