视觉传感器在智能网联汽车上的应用是以摄像头的方式出现,主要用于自适应巡航控制系统、车道偏离预警系统、车道保持辅助系统、汽车并线辅助系统、自动刹车辅助系统中的障碍物检測和道路检测等。 摄像头有单目摄像头和双目摄像头,如图2-27所示。
单目摄像头是利用摄像头采集车辆前方路况信息,并依靠数据库中保存的物体标志性特征轮廓识别前方物体,从而依靠独立的算法计算出物体与车辆的距离和接近速率。单目摄像头的优点是成本低廉,能够识别具体障碍物的种类,识别准确;缺点是由于其识别原理导致其无法识别没有明显轮廓的障碍物,工作准确率与外部光线条件有关,并且受限于数据库,没有自学习功能。
双目摄像头可以通过视频接收信号计算出汽车与其他物体间的距离。双目摄像头优点是功能较单目摄像头更强大,探测距离更准确,探测距离更远;缺点是成本高于单目摄像头。
摄像头有红外摄像头和普通摄像头,红外摄像头既适合白天工作,也适合黑夜工作;普通摄像头只适合白天工作,不适合黑夜工作。目前使用的主要是红外摄像头。
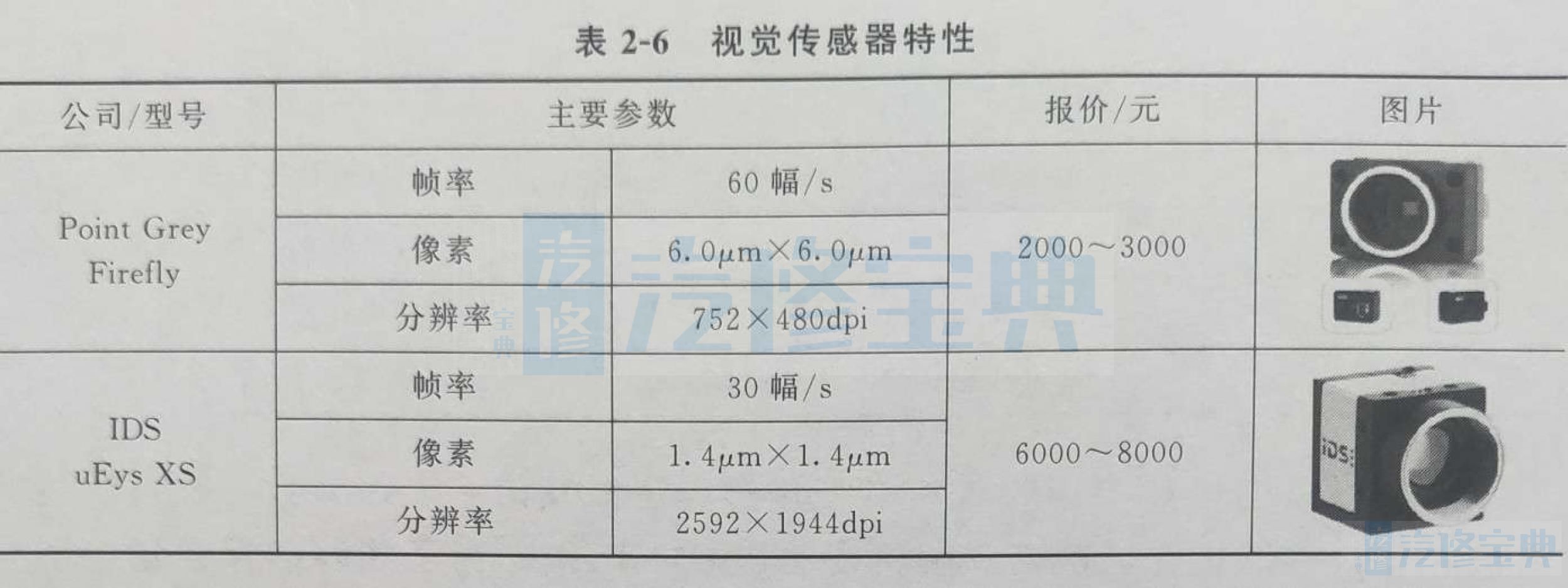
目前,汽车上使用的视觉传感器主要型号见表2-6,表中报价仅供参考。
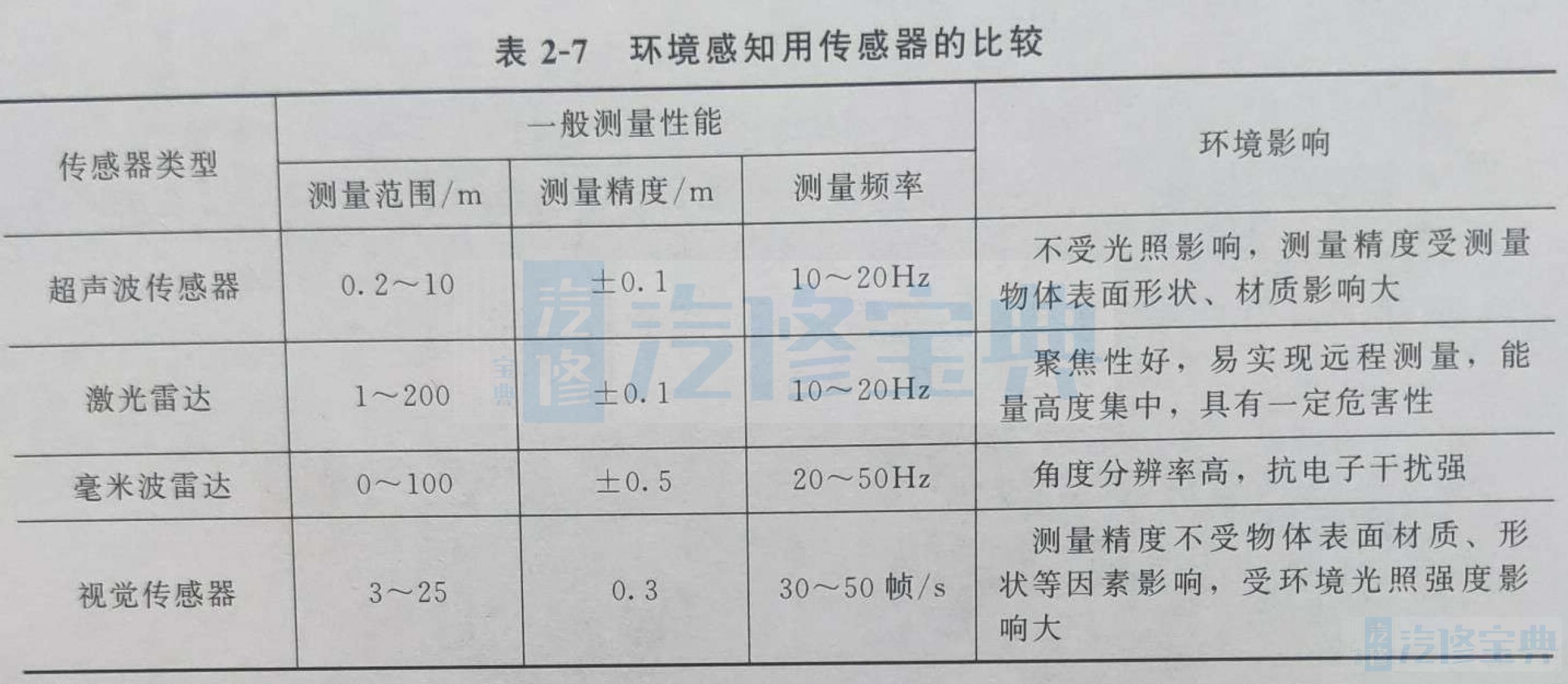
超声波传感器、激光雷达、毫米波雷达和视觉传感器作为主要的环境感知传感器,它们的选择需要综合考虑其性能特点和性价比,它们之间的比较见表2-7。