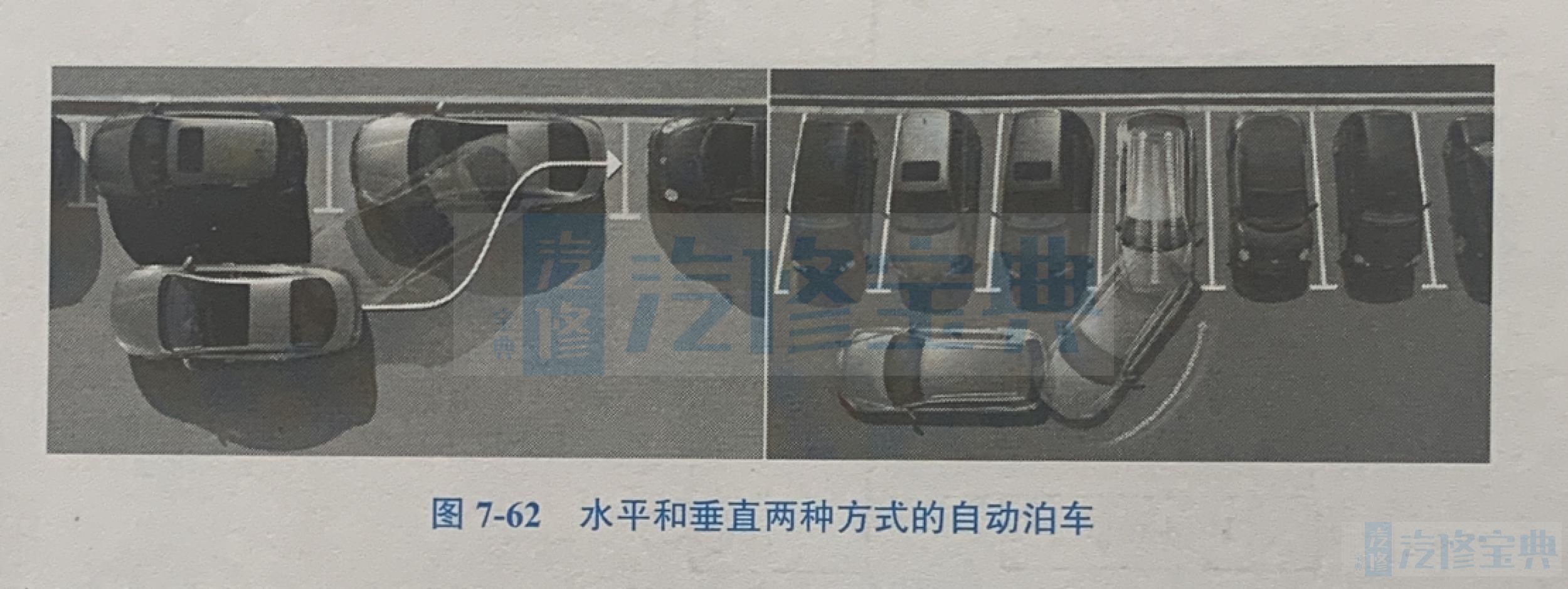
雪佛兰科鲁兹配备的自动泊车辅助系统可以实现水平和垂直两种方式的自动泊车,如图7-62所示。在泊车入位过程中,驾驶员仅需要控制制动踏板、加速踏板及排挡杆,转向盘操作由电脑完成,帮助驾驶员准确地将车停到指定位置,方便驾驶员操控车辆。
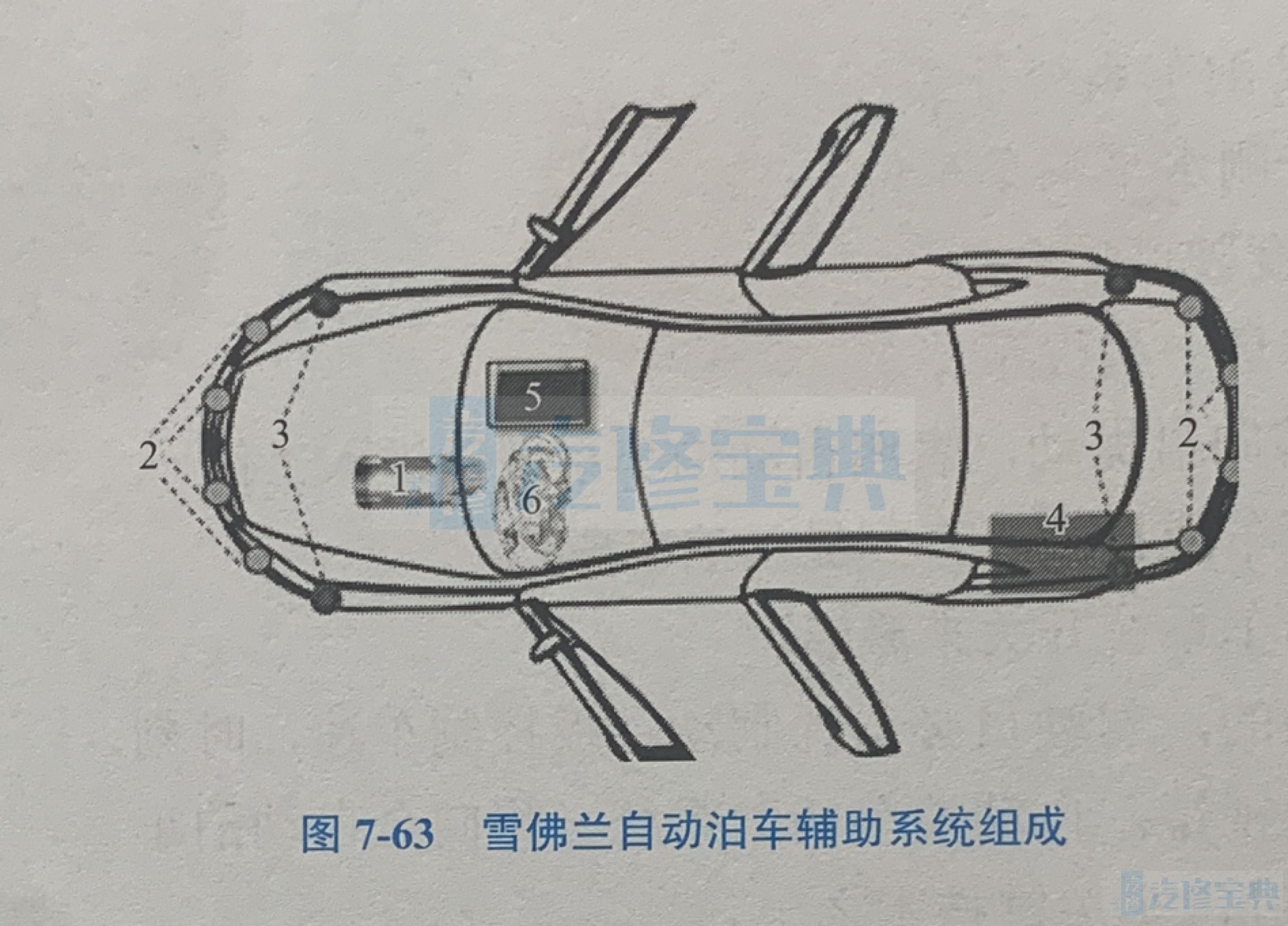
该自动泊车辅助系统组成如图7-63所示,图中1代表带自动转向功能的电动转向机;2代表8个驻车辅助传感器(UPA),用于测量泊车过程中与障碍物的距离,探测距离为1.5m;3代表4个泊车辅助传感器(APA),用于测量寻车过程中车位的长短,探测距离为1.5m;4代表APA模块,位于后备厢左侧衬板内,是驻车辅助、自动泊车辅助、侧盲区报警功能的主控模块,此模块在底盘拓展网络和低速网络上通信,向电动转向、仪表、收音机等模块发送控制指令和信息;5代表启用/关闭按钮,共有2个,分别打开和关闭UPA和APA功能;6代表仪表。
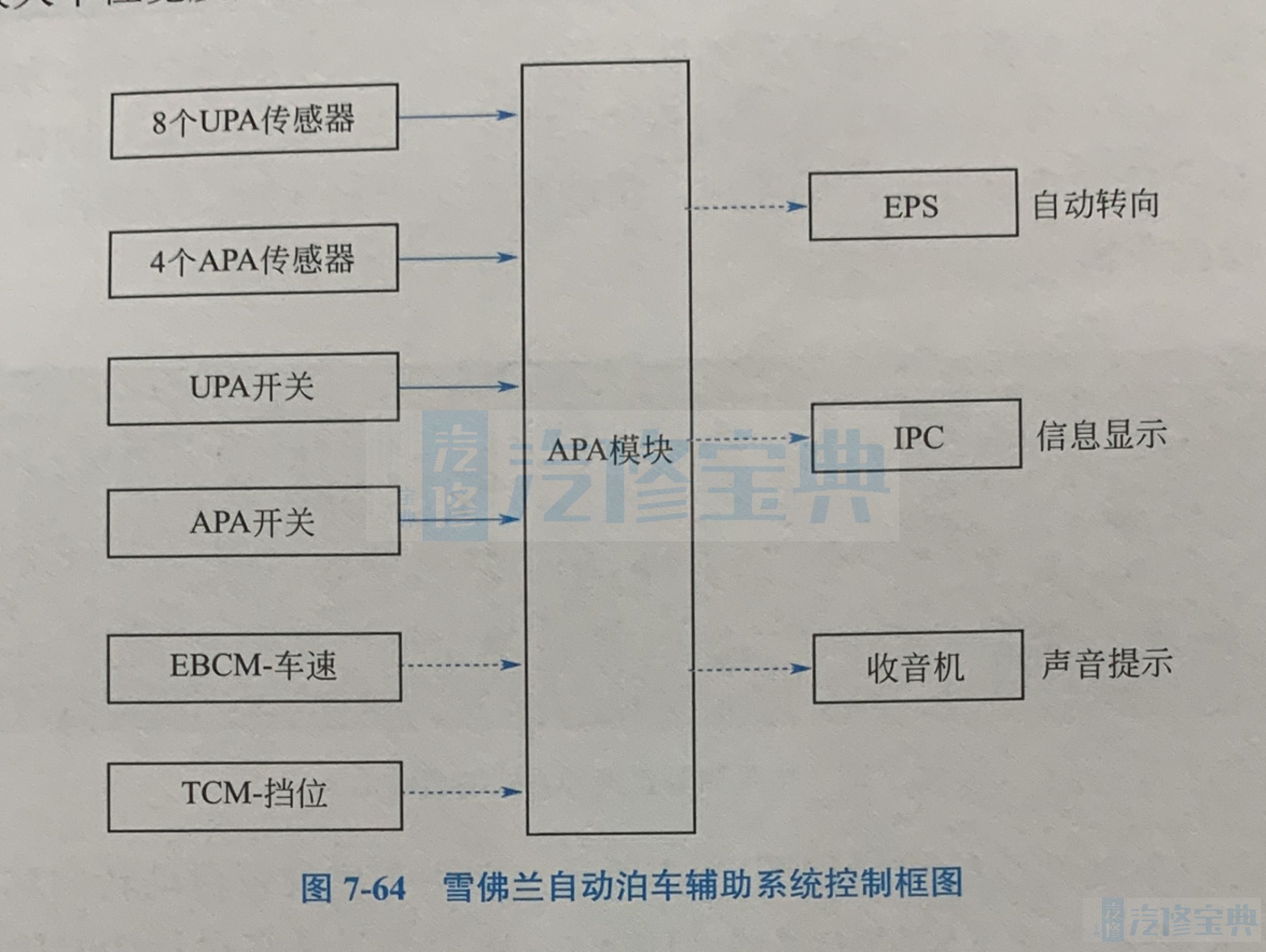
自动泊车辅助系统控制框图如图7-64所示,图中实线表示专线信号,虚线表示网络信号。系统进入工作状态时,通过APA传感器监测与路边车辆的相对位置来搜索车位。搜索到合适的车位以后,APA模块通过仪表和收音机扬声器向驾驶员提示停车并挂入倒挡。驾驶员按指令操作后,APA模块向EPS(电动助力转向)模块发出转向控制指令,并通过持续的APA和UPA传感器信号来判定车辆实际位置,通过仪表向驾驶员发出指示,直到完全停车入位自动泊车辅助系统水平泊车时,参照车辆与本车的距离应控制在0.3~1.5m范围内,最小车位长度为车身长度加0.8m,最大车位长度为12m;垂直泊车时,参照车辆与本车的距离应控制在0.3~1.5m范围内,最小车位宽度为车身宽度加
0.8m,最大车位宽度为12m。
自动泊车操作步骤如下。
①在车辆处于D挡时,按下自动泊车系统开关。
②按下开关后,系统默认寻找右侧水平泊车车位。
③驾驶车辆以低于30km/h的速度驶过停车位。
④系统找到车位后,在驾驶员信息中心提示停车。
⑤踩下制动踏板,挂入R挡,转向盘振动,表明自动泊车系统已进入工作。
⑥按驾驶员信息中心提示信息停车或换挡,直到显示泊车成功。
⑦如需要垂直泊车,需要长按泊车系统开关来激活。
自动泊车辅助系统都不是全自动的,驾驶员必须踩制动踏板控制车速,时刻盯紧汽车的倒车雷达显示屏和左右后视镜。自动泊车辅助系统必将向全自动泊车系统发展,全自动泊车是实现无人驾驶汽车关键技术之一。