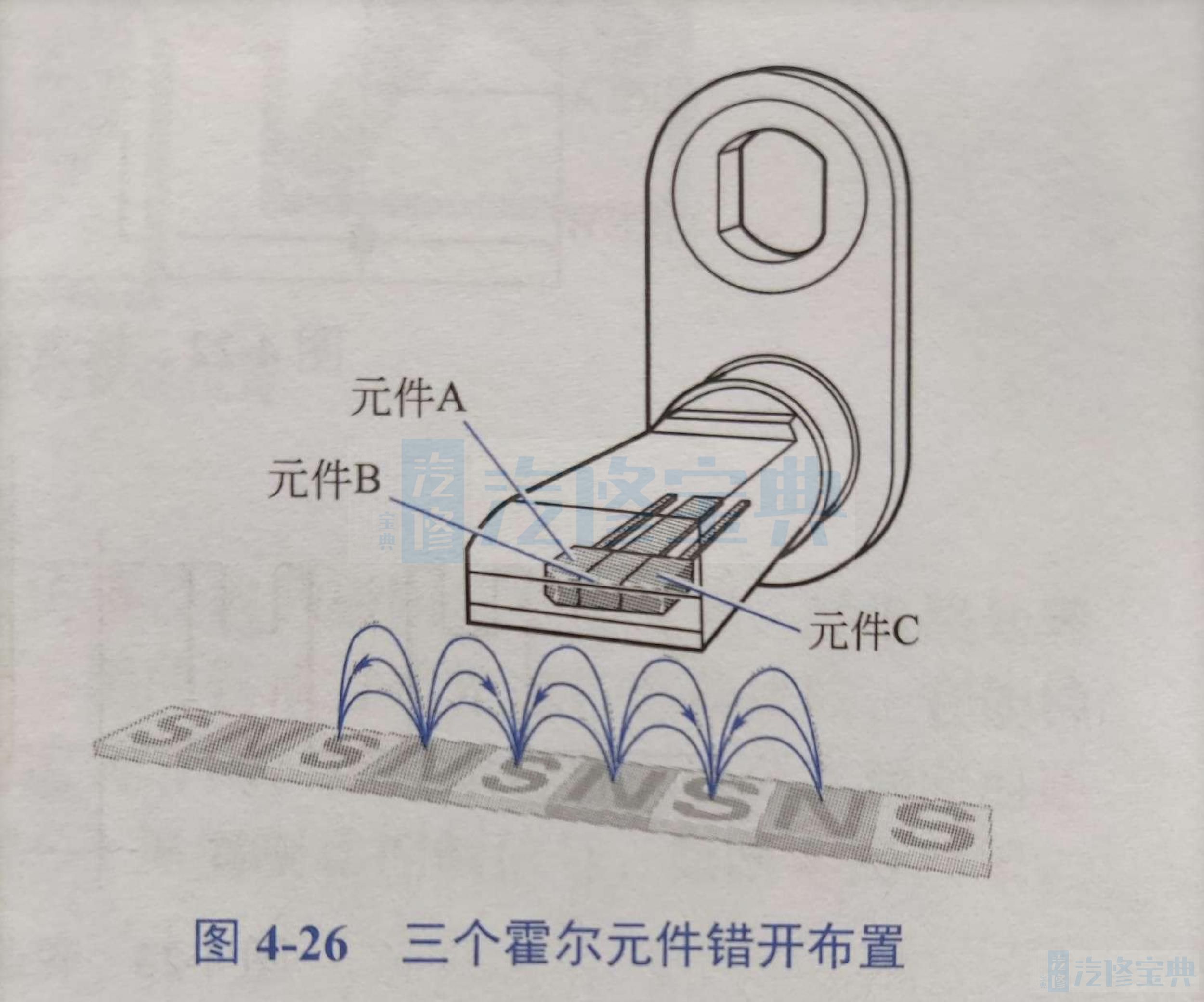
传感器感知磁通量的变化,三个霍尔元件是错开布置的,如图4-26所示,元件之间的距离是这样选择的:当元件C测出的磁通量最小时,元件A测出的磁通量最大。传感器内会产生一个差动信号(AC)。
霍尔元件B布置在A和C之间。当信号A和C以及差动信号为零时,元件B测出的磁通量最大。信号B何时达到最大值(正或负)就作为判定旋转方向的依据。例如,如果差动信号(A-C)的过零点是由信号的下降沿得到的,且信号B的最大值为负,那么就认为车轮在逆时针转动,如图4-27所示。


传感器感知磁通量的变化,三个霍尔元件是错开布置的,如图4-26所示,元件之间的距离是这样选择的:当元件C测出的磁通量最小时,元件A测出的磁通量最大。传感器内会产生一个差动信号(AC)。
霍尔元件B布置在A和C之间。当信号A和C以及差动信号为零时,元件B测出的磁通量最大。信号B何时达到最大值(正或负)就作为判定旋转方向的依据。例如,如果差动信号(A-C)的过零点是由信号的下降沿得到的,且信号B的最大值为负,那么就认为车轮在逆时针转动,如图4-27所示。

返回顶部