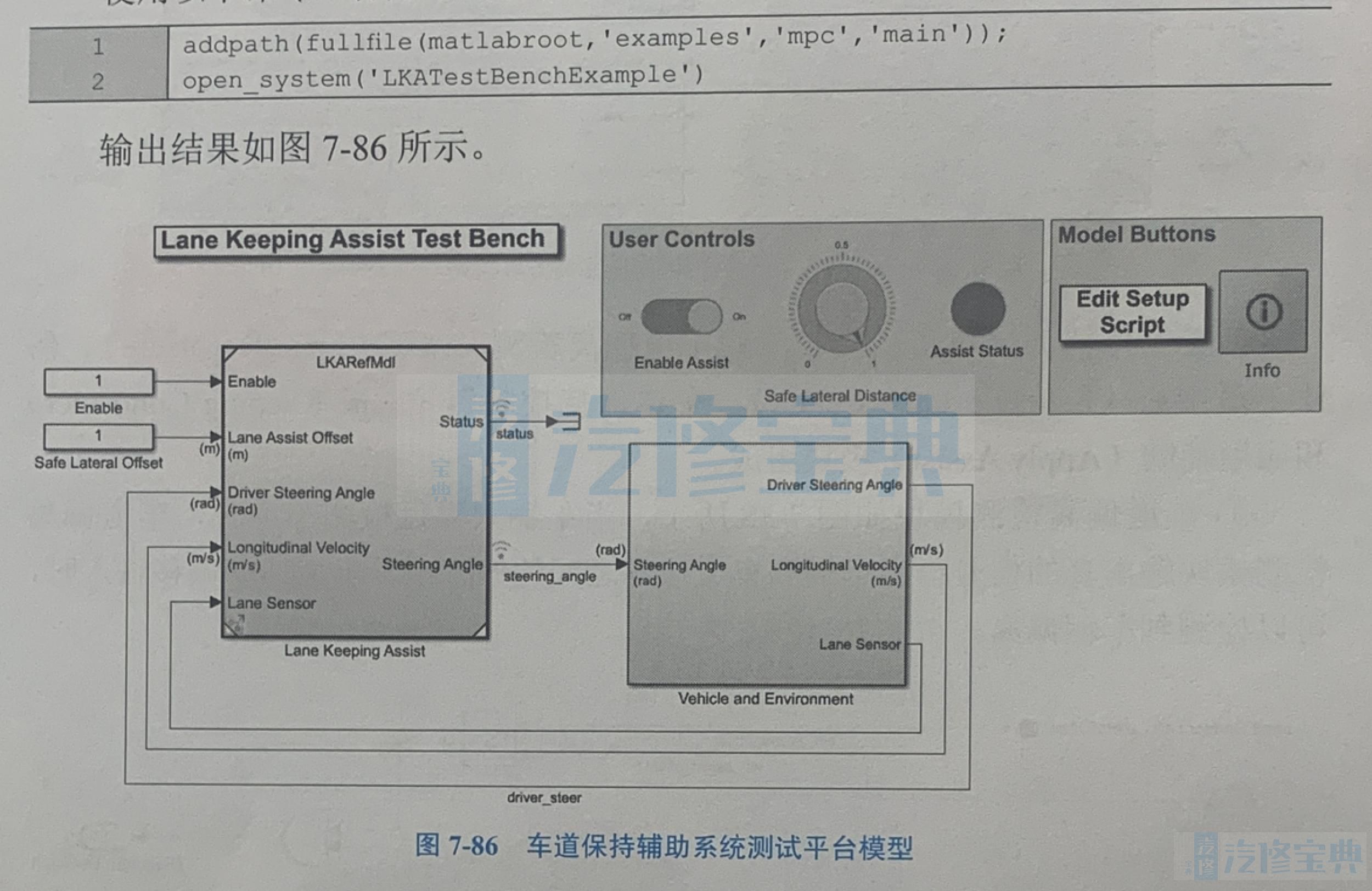
【例72】基于测试平台的车道保持辅助系统仿真。 车道保持辅助(LKA)系统能够帮助驾驶员在标记的车道内保持安全行驶。 当LKA系统检测到车辆偏离车道时,可以自动调整转向以恢复车道内的正确行驶,而无须驾驶员的额外干预。为了使LKA正常工作,汽车必须检测车道边界以及前方车道的转弯方向。理想的LKA设计主要取决于预瞄的曲率、横向偏差和车道中心线与汽车之间的相对偏航角。LKA必须对实际车道检测器的缺失、不完整或不准确的测量数据具有鲁棒性。 MATLAB提供了车道保持辅助系统测试平台。 1.车道保持辅助系统测试平台模使用以下命令,打开车道保持辅助系统测试平台模型。
车道保持辅助系统测试平台主要由车道保持辅助模块( Lane Keeping Assist车辆和环境模块( Vehicle and Environment)、用户控制( User Controls)和模型按钮( Model buttons)组成。
车道保持辅助模块主要控制车辆的前轮转角;车辆和环境模块主要模拟汽车的运动和环境。
用户控制包括启用辅助( Enable assist、安全横向距离( Safe Lateral Distance)和协助状态( Assist status)。启用辅助有关闭(off)和打开(on)模式;安全横
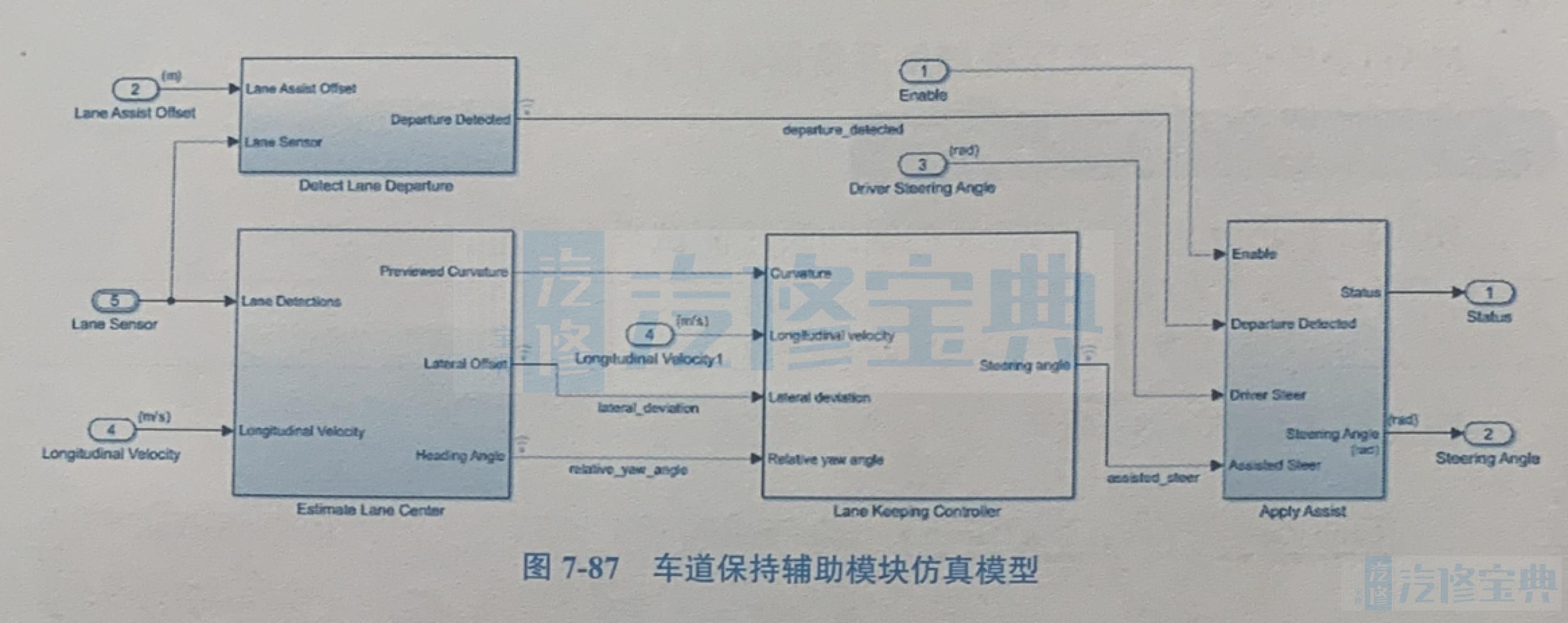
车道保持辅助模块仿真模型又由车道偏离检测( Detect Lane Departure)、估计车道中心( Estimate Lane center)、车道保持控制器( Lane Keeping Controller)和应用辅助( Apply Assist模块组成。
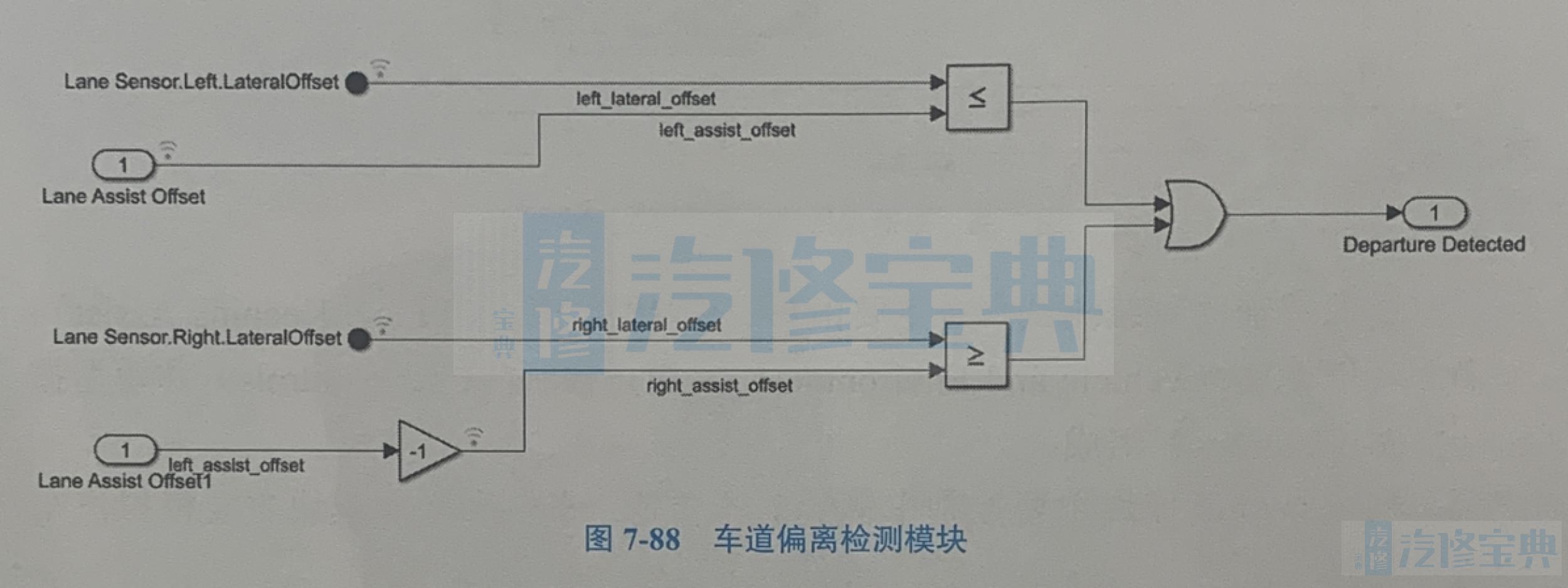
①车道偏离检测模块如图7-88所示,当车辆太靠近检测车道时,车道偏离检测模块输岀真的信号;当车辆和车道边界之间的偏移小于车道辅助偏移输入时,可以检测到车辆偏离。
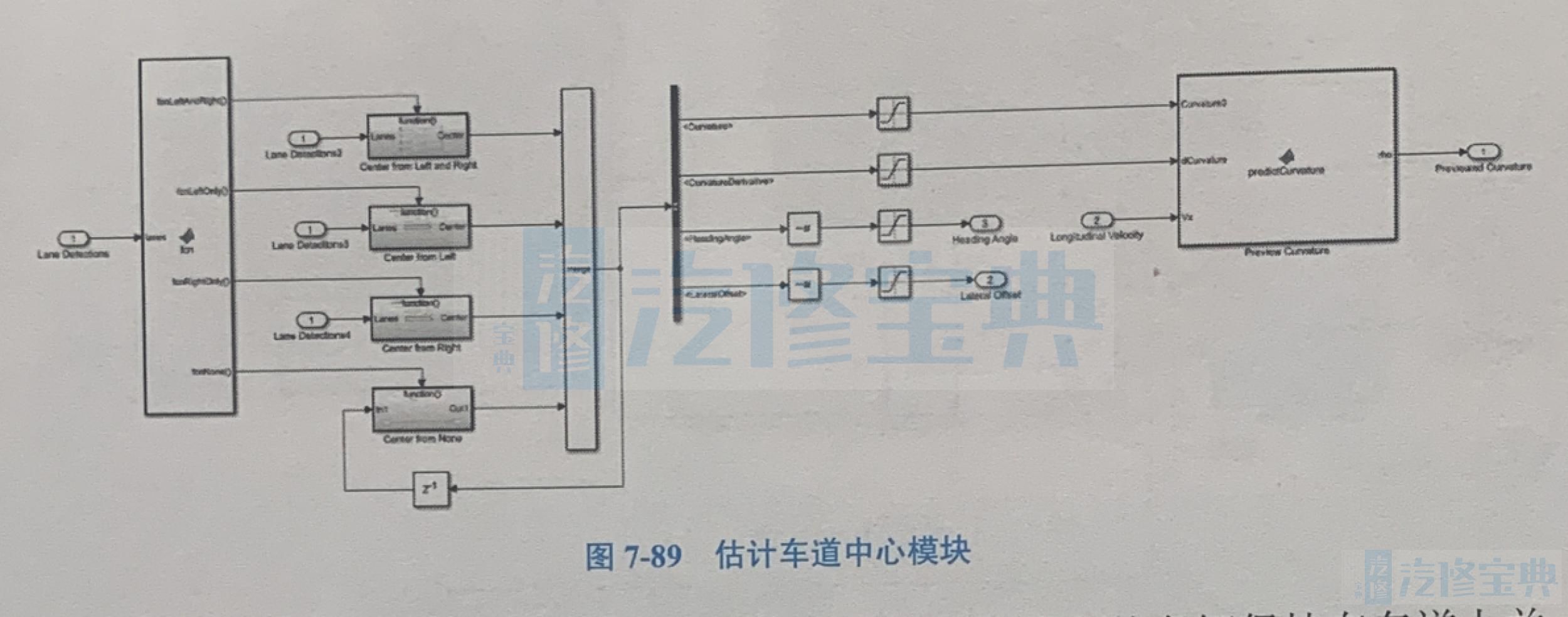
②估计车道中心模块如图7-89所示,它将来自车道检测传感器的数据输出到车道保持控制器。
③车道保持控制器模块的目标是通过控制前轮转向角使车辆保持在车道上并沿着弯曲的道路行驶。
LKA控制器根据传感器检测的道路曲率、横向偏差、相对偏航角和汽车的行驶速度计算汽车的转向角度。
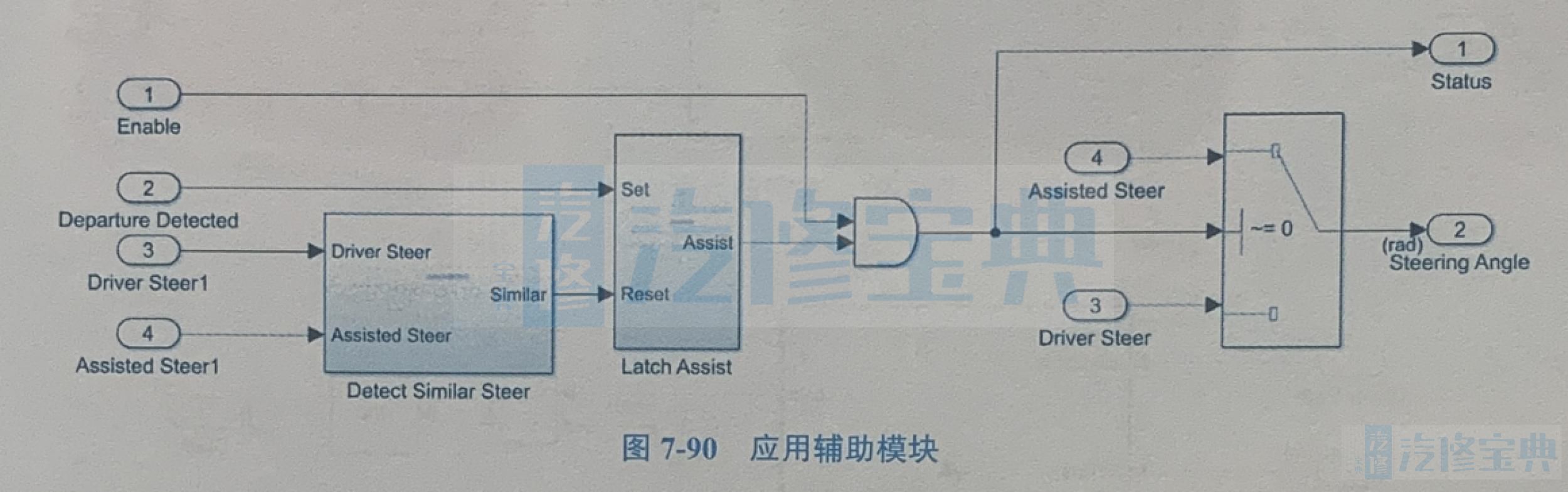
④应用辅助模块如图7-90所示,它决定是由车道保持控制器控制汽车还是由驾驶员控制汽车,应用辅助模块在驾驶员指令转向和车道保持控制器的辅助转向之间切换。当检测到车道偏离时,辅助转向开始;当驾驶员再次开始在车道内转向时,控制权返还给驾驶员。
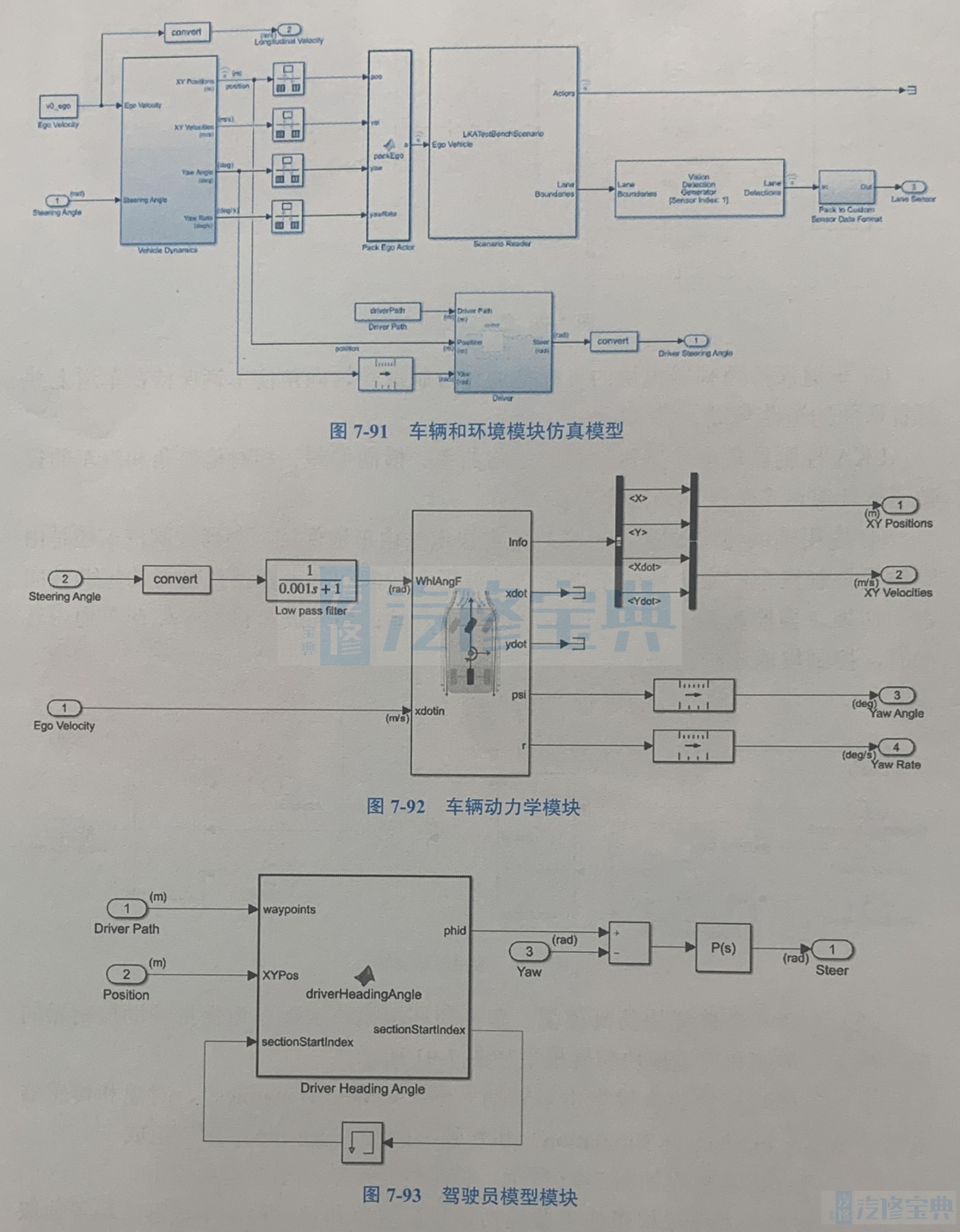
(2)车辆和环境模块 仿真模型车辆和环境模块实现车道保持辅助控制器的闭环仿真。车辆和环境模块仿真模型如图791所示。
车辆和环境模块仿真模型由车辆动力学( Vehicle Dynamics)、对象和传感器模拟( Actors and Sensor Simulation)和驾驶员模型( Driver model)组成。
①车辆动力学模块如图7-92所示,使用的是单轨汽车3自由模型。
②对象和传感器模拟模块主要包括场景读取器和视觉检测生成器。场景读取器根据车辆相对于场景的位置生成理想的左车道和右车道边界;视觉检测生成器从场景读取器中获取理想的车道边界,对单目摄像机的视场建模,并确定航向角曲率、曲率导数和每个道路边界的有效长度,并考虑任何其他障碍物。
③驾驶员模型模块如图7-93所示,根据创建的驾驶员路径生成驾驶转向角度。
可以根据需要,修改仿真模型的参数;如果仿真满足要求,还可以自动生成控制算法的代码。
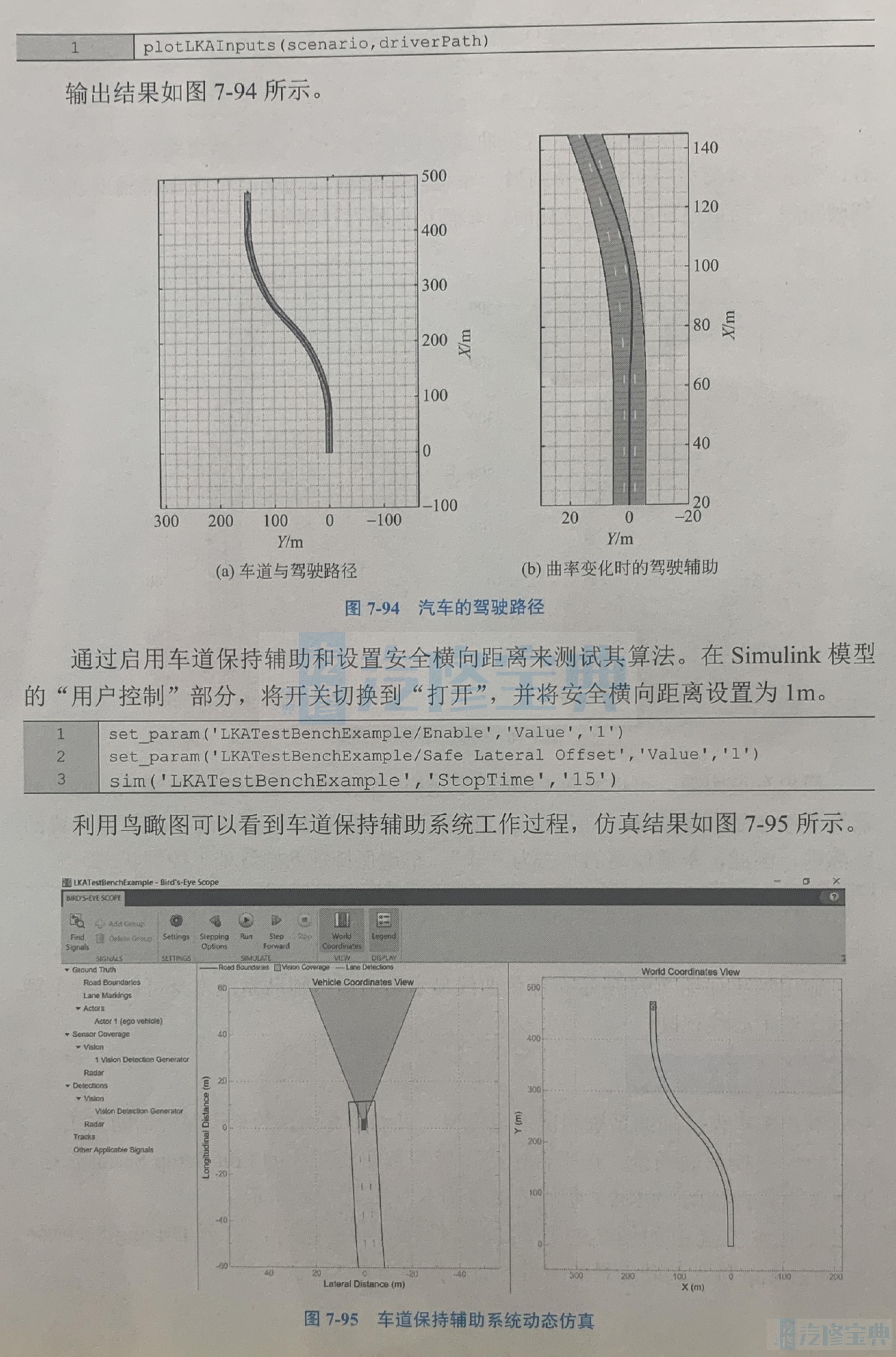
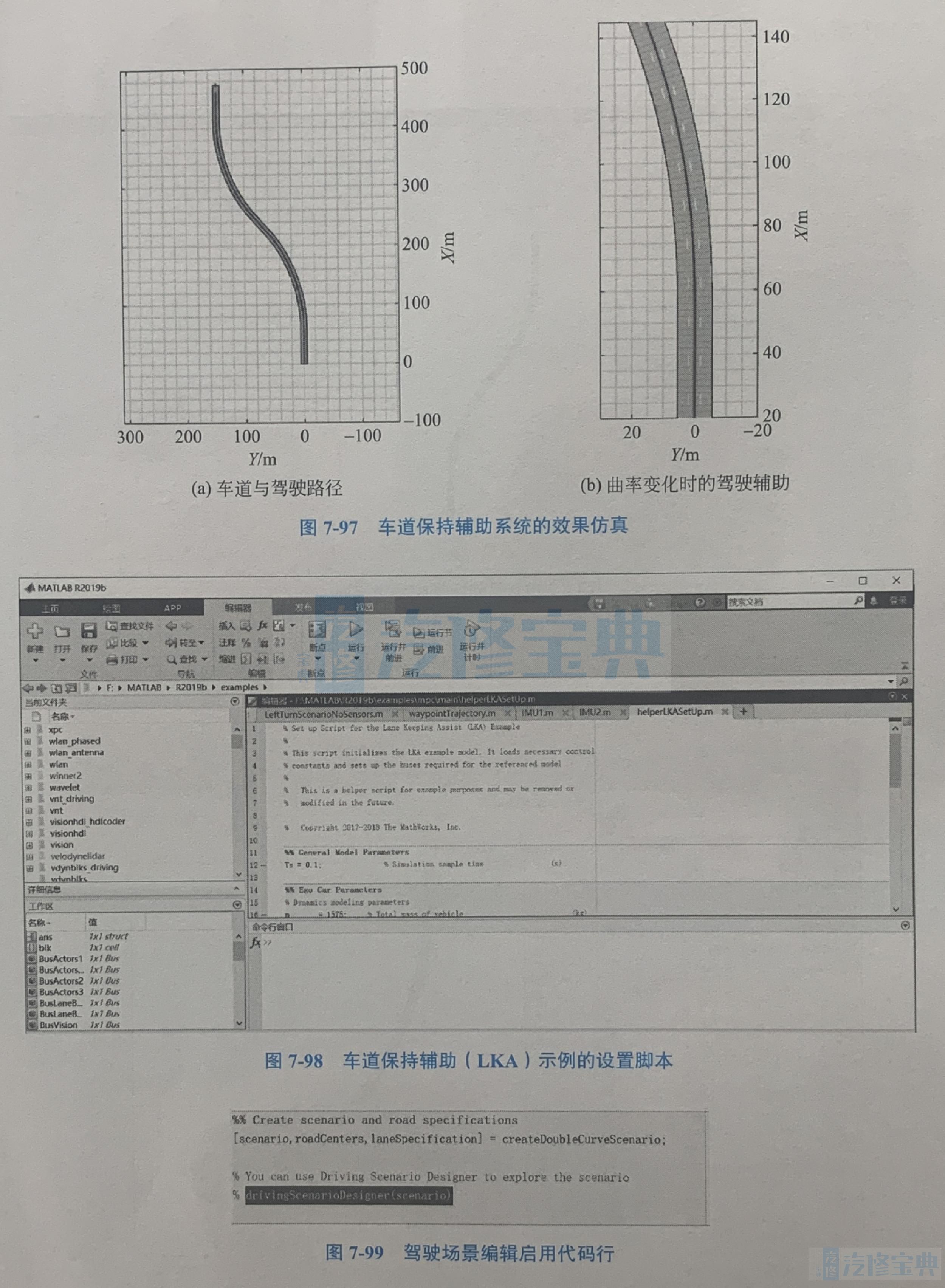
2.车道保持辅助系统仿真可以绘制道路以及驾驶员模型将遵循的路径。
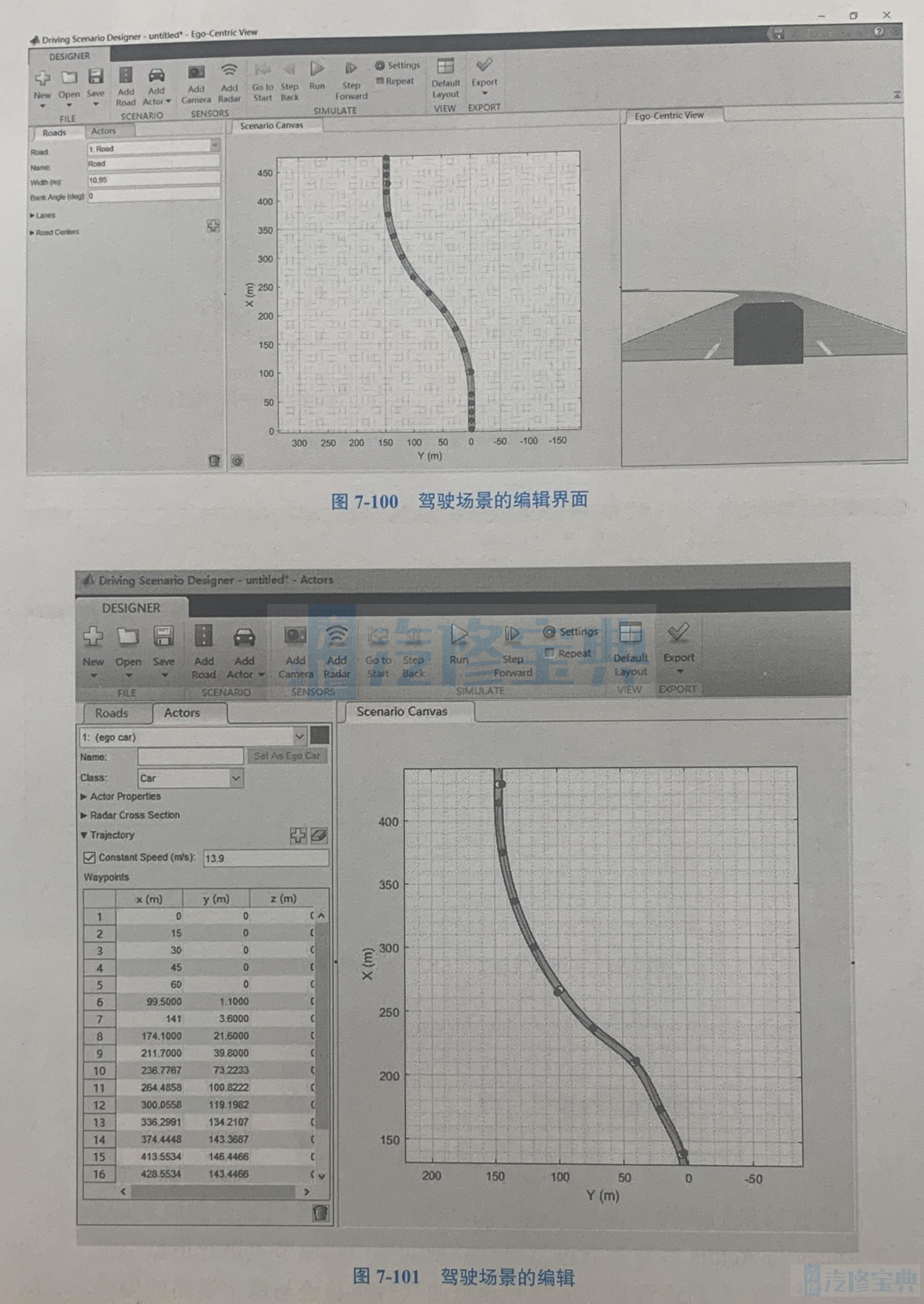
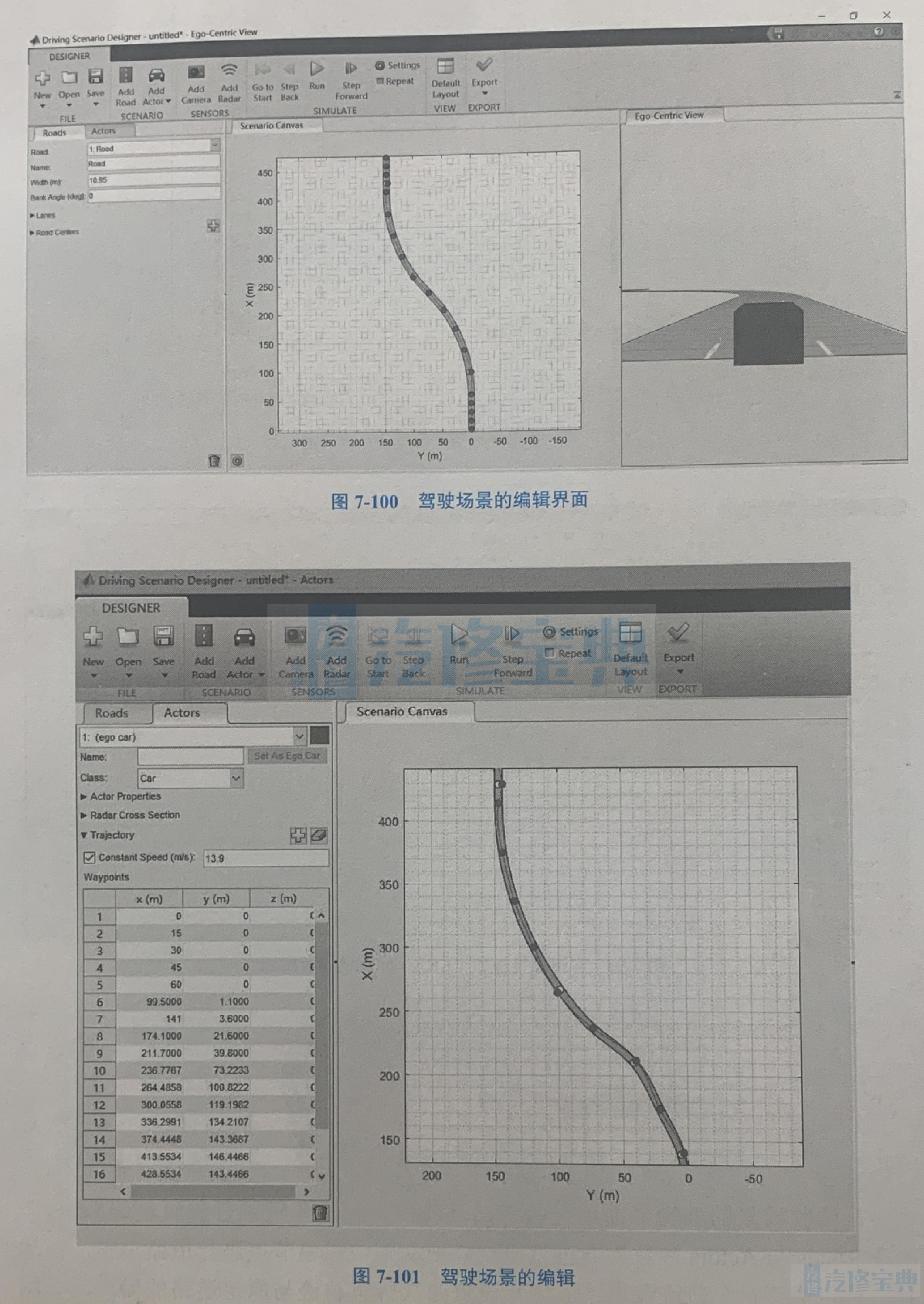
在驾驶场景的编辑界面可进行道路环境的编辑、车辆预行驶轨迹的编辑等,可在 Roads与 Actors参数界面进行设置。拖动图中白色节点进行道路编辑,拖动蓝色节点进行行车轨迹编辑,例如共设置四次行车轨迹与原定道路的偏离,如图
7-101所示。
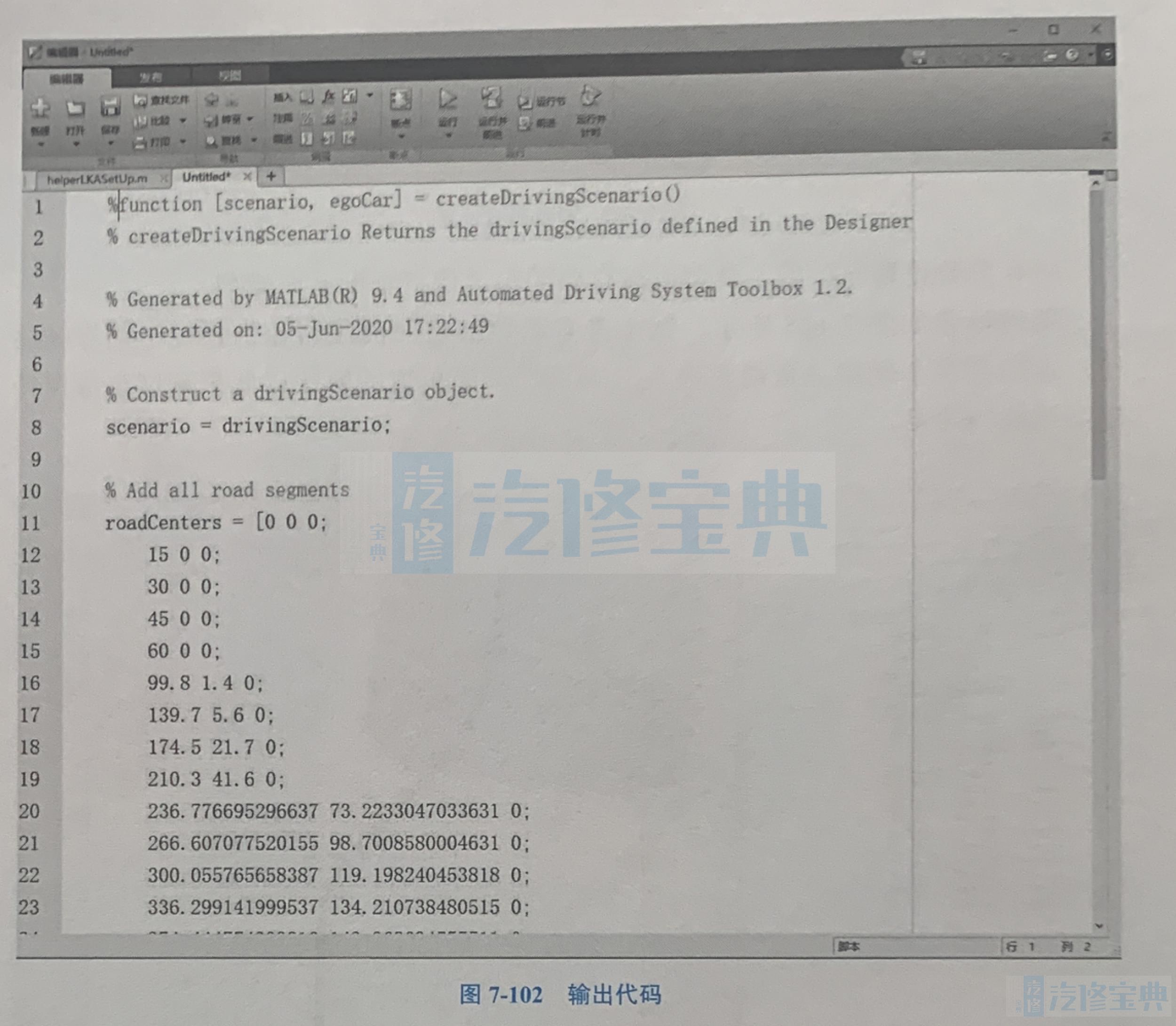
在完成所需的场景设置编辑后,选择输出按钮 Export中的 Export MATLABFunction,形成新驾驶场景代码,如图7-102,注释掉第一行代码,之后选中编辑器内全部代码行并右键执行。
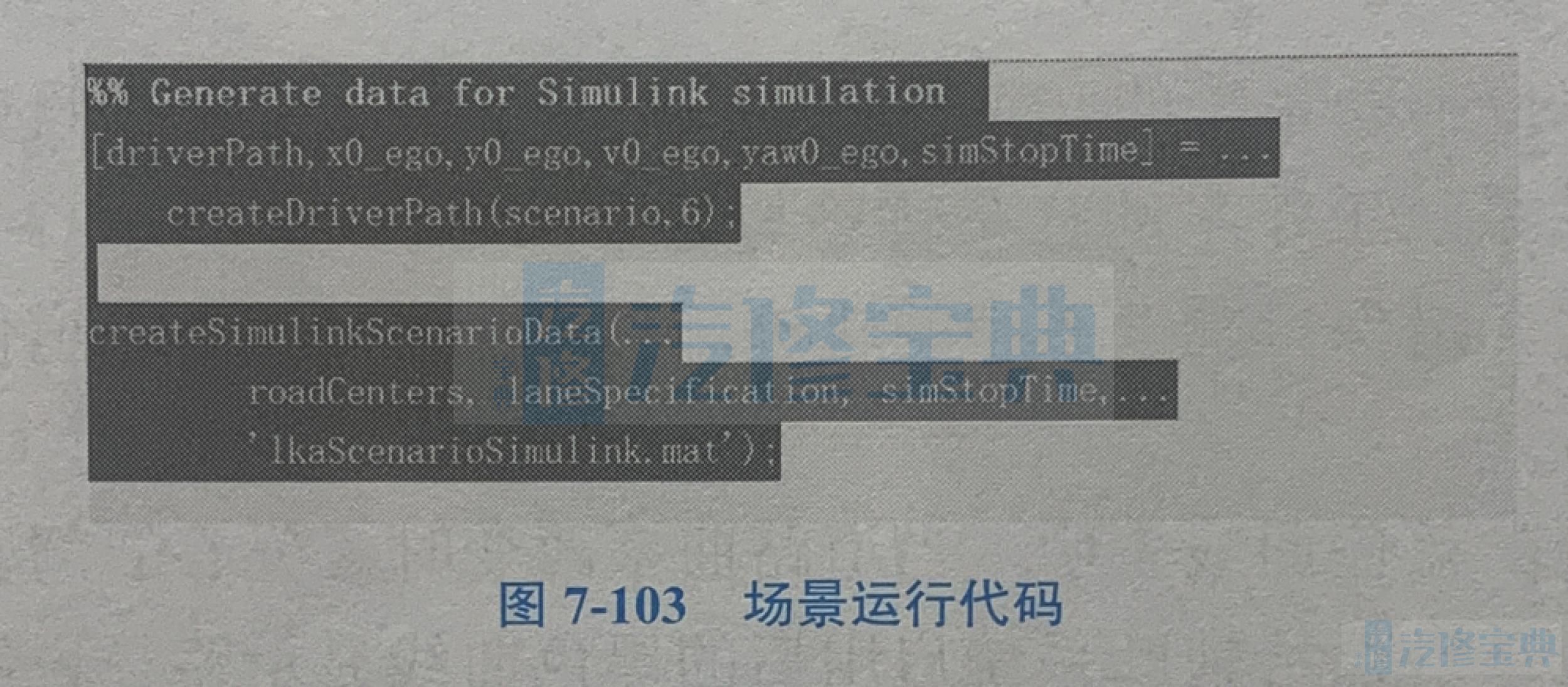
执行完毕后保存关闭驾驶场景输出代码编辑器窗口,回到 Edit Setup Script界面,选中如图7-103所示代码并执行,完成驾驶场景设置。
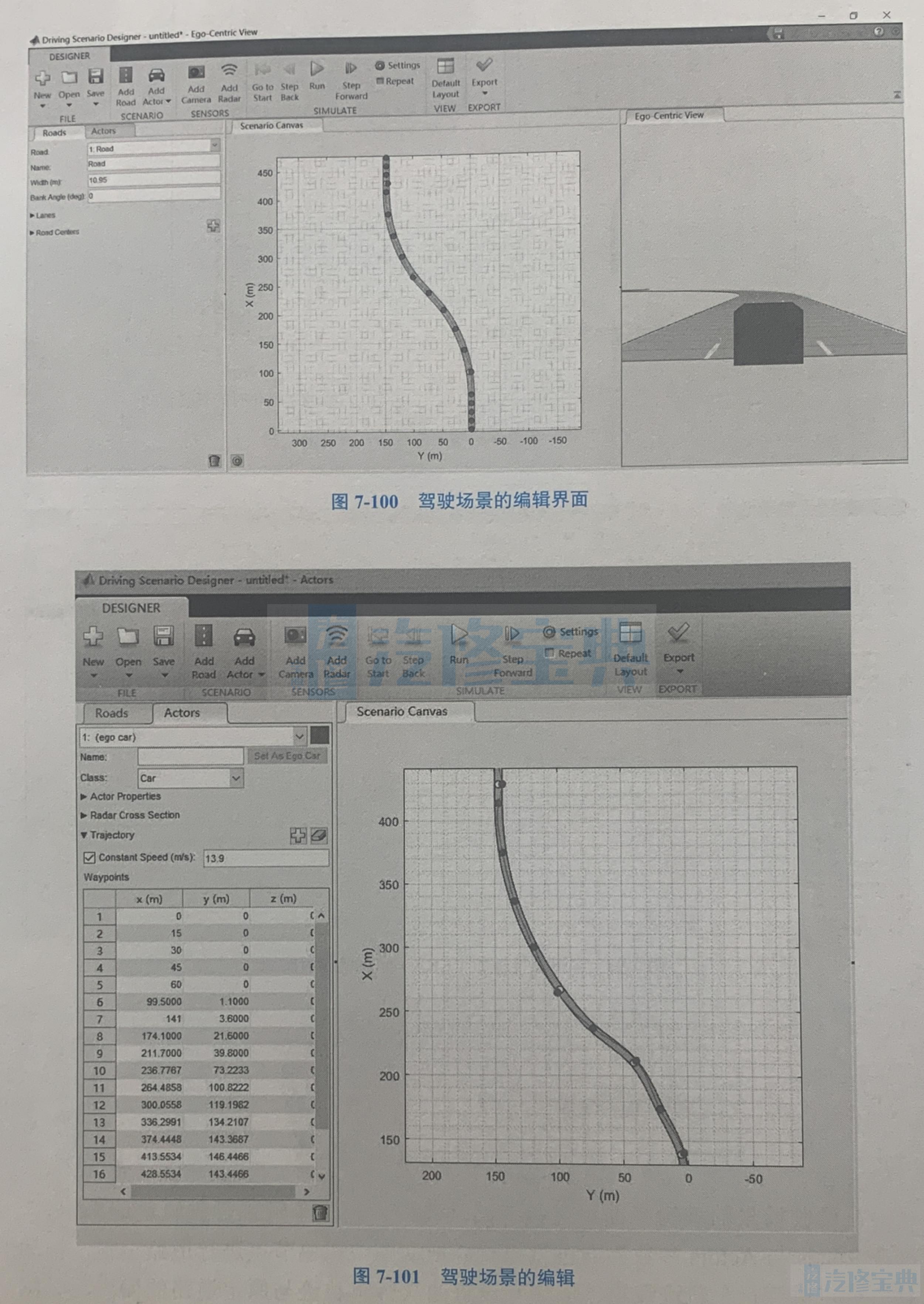
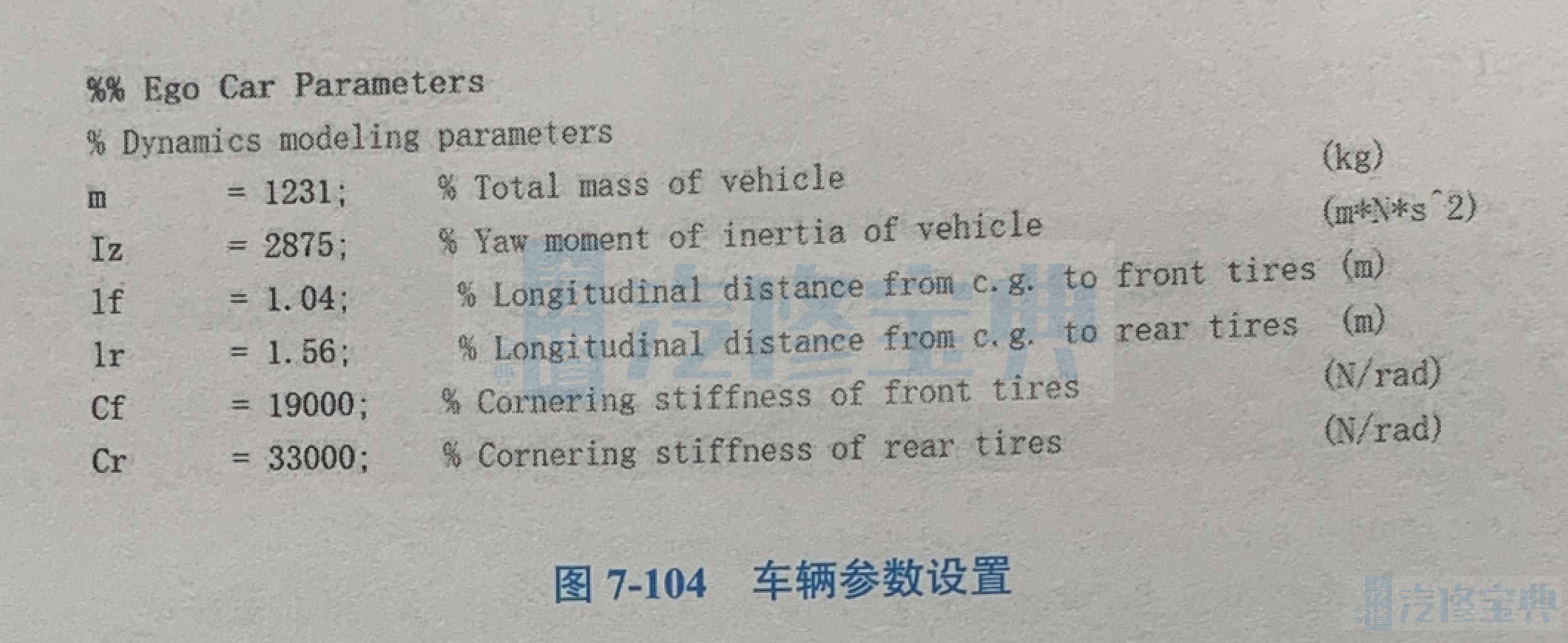
(2)车辆参数设置 在车道保持辅助(LKA)示例的设置脚本中,选择车辆
参数进行重新设置,如图7-104所示,设置完以后关闭脚本编辑器。
所有参数设置完以后,就可以运行新的车道保持辅助系统模型。
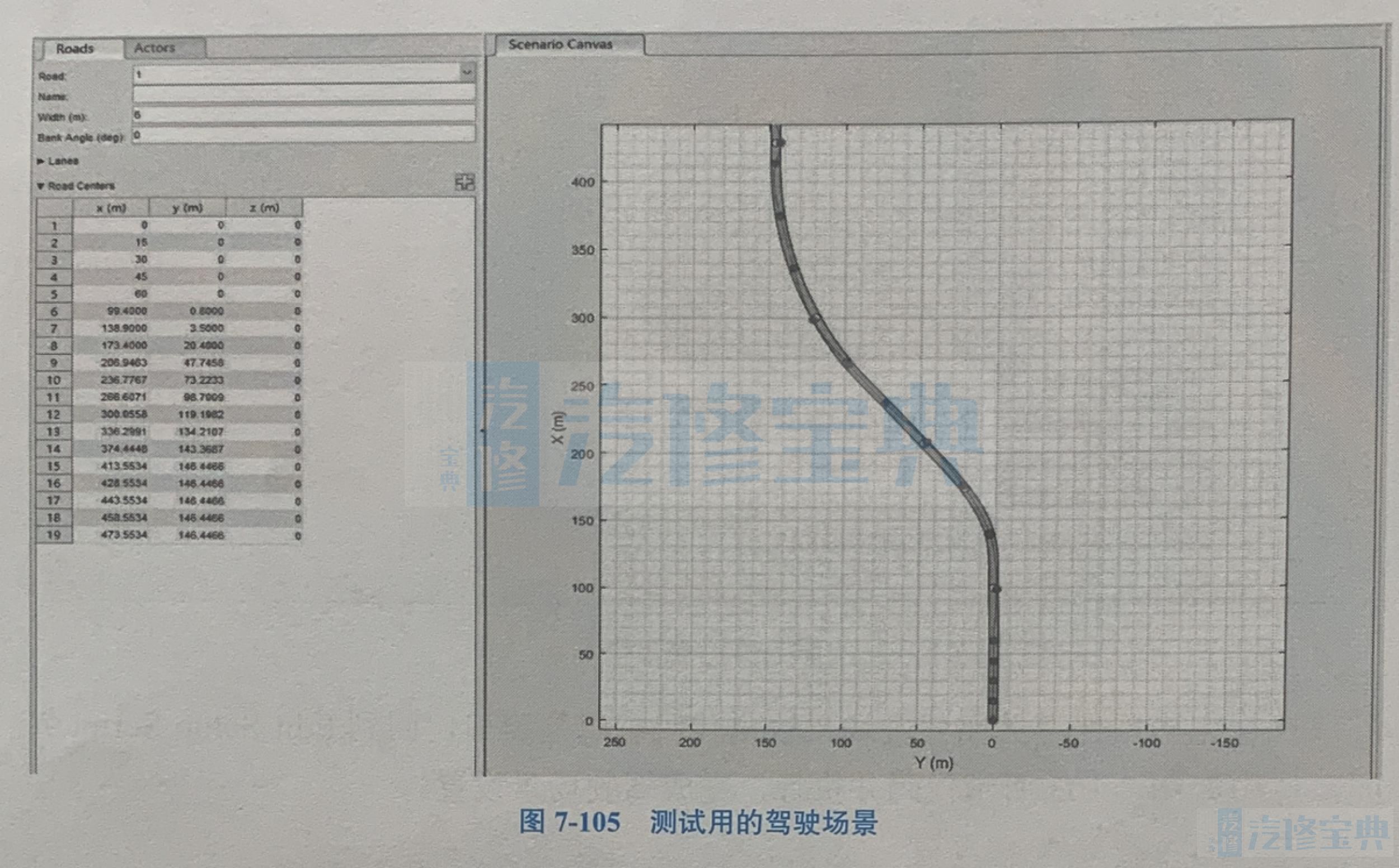
驾驶场景如图7-105所示。图中带有蓝色节点的曲线路径为预设车辆行驶路径,本场景中车辆将沿道路行驶并出现数次偏离车道的轨迹以此来测试车道保持辅助系统的效果。
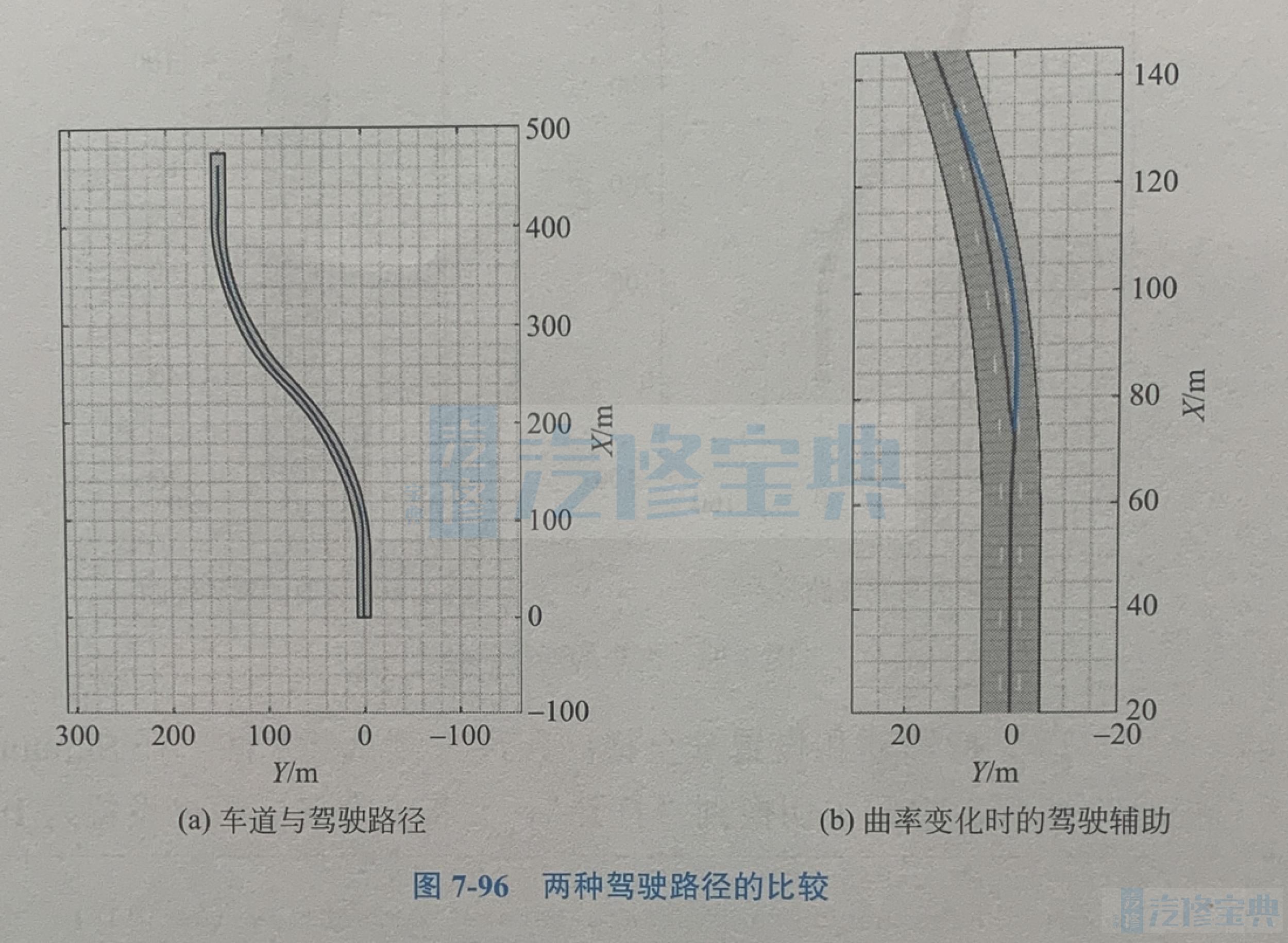
通过车道保持辅助系统的开关与否及车道检测安全阈值的设定,可以对比测试车道保持辅助系统工作下的行车轨迹与无介入的轨迹,如图7-106所示,其中黑色轨迹为启用车道保持辅助系统的轨迹,蓝色轨迹为关闭车道保持辅助系统的轨迹。
驾驶员路径的蓝色曲线表明,当道路曲率改变时,分心的驾驶员会将车辆驾驶到另一车道。车道保持辅助系统启用后的黑色曲线显示路径说明,当道路曲率发生变化时,车辆仍保留在车道中。
车道保持辅助系统的控制性能如图7-107所示,LKA的横向偏差在[-0.5m,0.5m]之内,LKA的相对偏航角在[-0.2rad,0.2rad]范围内,LKA的转向角在-0.5rad,0.5rad]范围内。