纯电动汽车整车控制系统主要分为集中式控制和分布式控制两种方案。 集中式控制系统的基本思想是整车控制器独自完成对输入信号的采集,并根据控制策略对数据进行分析和处理,然后直接对各执行机构发出控制指令,驱动纯电动汽车的正常行驶。集中式控制系统的优点是处理集中、响应快和成本低; 缺点是电路复杂,并且不易散热分布式控制系统的基本思想是整车控制器采集一些驾驶员信号,同时通过CAN总线与电机控制器和电池管理系统通信,电机控制器和电池管理系统分别将各自采集的整车信号通过CAN总线传递给整车控制器。整车控制器根据整车信息,并结合控制策略对数据进行分析和处理,电机控制器和电池管理系统收到控制指令后,根据电机和电池当前的状态信息,控制电机运转和电池放电。分布式控制系统的优点是模块化和复杂度低;缺点是成本相对较高。
典型分布式整车控制系统示意图如图4-1所示,整车控制系统的顶层是整车控制器,整车控制器通过CAN总线接收电机控制器和电池管理系统的信息,并对电机控制器、电池管理系统和车载信息显示系统发送控制指令。电机控制器和电池管理系统分别负责驱动电机和动力电池组的监控与管理,车载信息显示系统用于显示车辆当前的状态信息等。
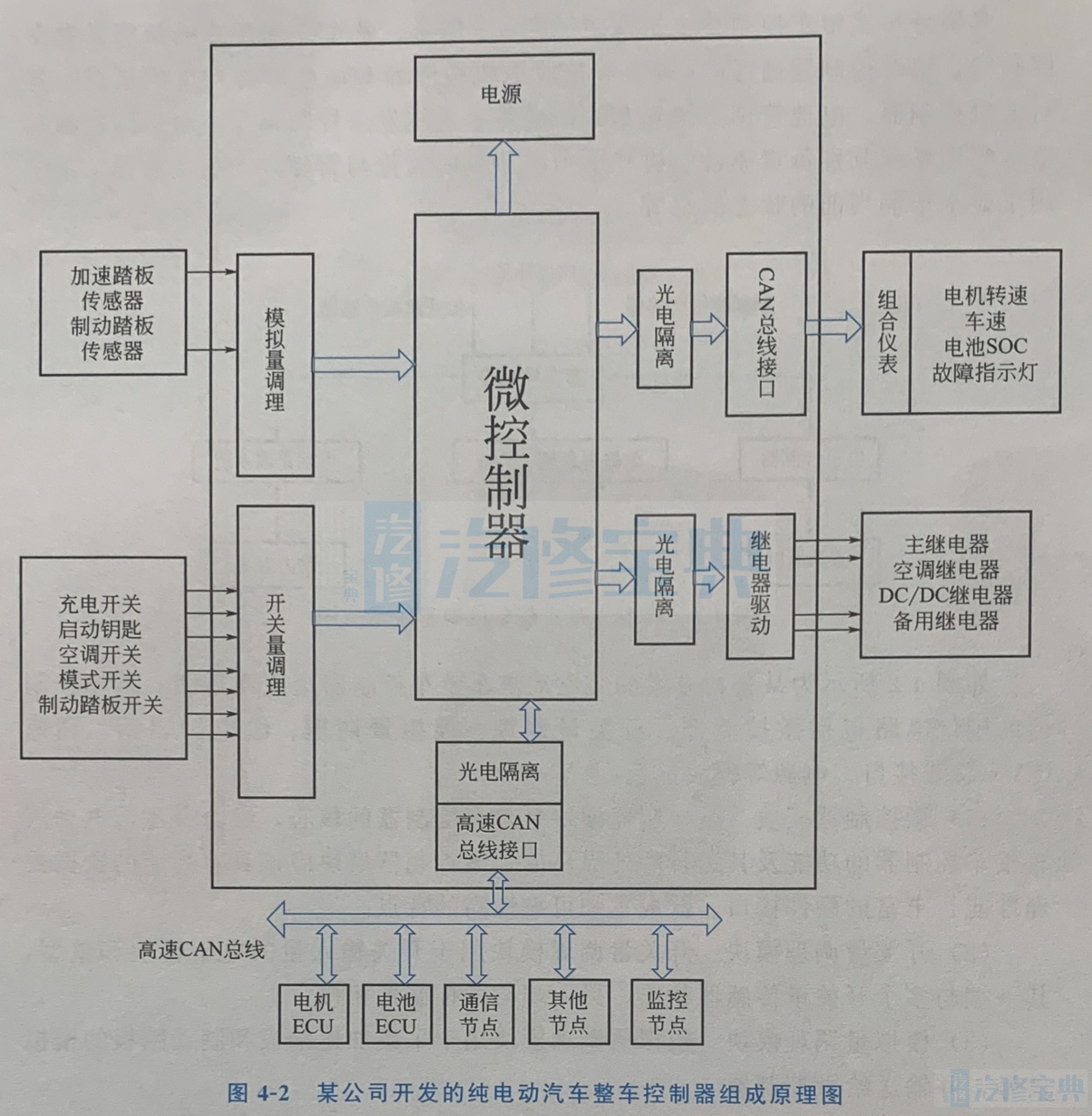
如图4-2所示为某公司开发的纯电动汽车整车控制器组成原理图。整车控制器的硬件电路包括微控制器、开关量调理、模拟量调理、继电器驱动、高速CAN总线接口、电源等模块。
(1)微控制器模块微控制器模块是整车控制器的核心,综合考虑纯电动汽车整车控制器的功能及其运行的外界环境,微控制器模块应该具有高速的数据处理性能、丰富的硬件接口、低成本和可靠性高的特点。
(2)开关量调理模块开关量调理模块用于开关输人量的电平转换和整型其一端与多个开关量传感器相连,另一端与微控制器相接。
(3)模拟量调理模块模拟量调理模块用于采集加速踏板和制动踏板的模拟信号,并输送给微控制器。
(4)继电器驱动模块继电器驱动模块用于驱动多个继电器,其一端通过光电隔离器与微控制器相连,另一端与多个继电器相接。
(5)高速CAN总线接口模块高速CAN总线接口模块用于提供高速CAN总线接口,其一端通过光电隔离器与微控制器相连,另一端与系统高速CAN总线相接。
(6)电源模块电源模块为微处理器和各输入、输出模块提供隔离电源,并对蓄电池电压进行监控,与微控制器相连。
整车控制器对电动汽车动力链的各个环节进行管理、协调和监控,以提高整车能量利用效率,确保安全性和可靠性。整车控制器采集驾驶员驾驶信号,通过CAN总线获得驱动电机和动力电池系统的相关信息,进行分析和运算,通过
CAN总线给出电机控制和电池管理指令,实现整车驱动控制、能量优化控制和制动能量回收控制。整车控制器还具有综合仪表接口功能,可显示整车状态信息;具备完善的故障诊断和处理功能;具有整车网关及网络管理功能。