超声波雷达也称超声波传感器,它是利用超声波特性研制而成,是在超声波频率范围内(>20kHz)将交变的电信号转换成声信号或将外界声场中的声信号转换为电信号的能量转换器件超声波雷达在汽车上经常用于倒车,所以也称倒车雷达。 ⒈超声波雷达的组成。 超声波雷达内部有一个发射头和一个接收头,安装在同一面上。在有效的检测距离内,发射头发射特定频率的超声波,遇到检测面反射部分超声波:接收头接收返回的超声波,由芯片记录声波的往返时间,并计算出距离值;超声波雷达可以通过模拟接口和ⅡC接口两种方式将数据传输给控制单元,如图5-1所示。
2.超声波雷达的测距原理。
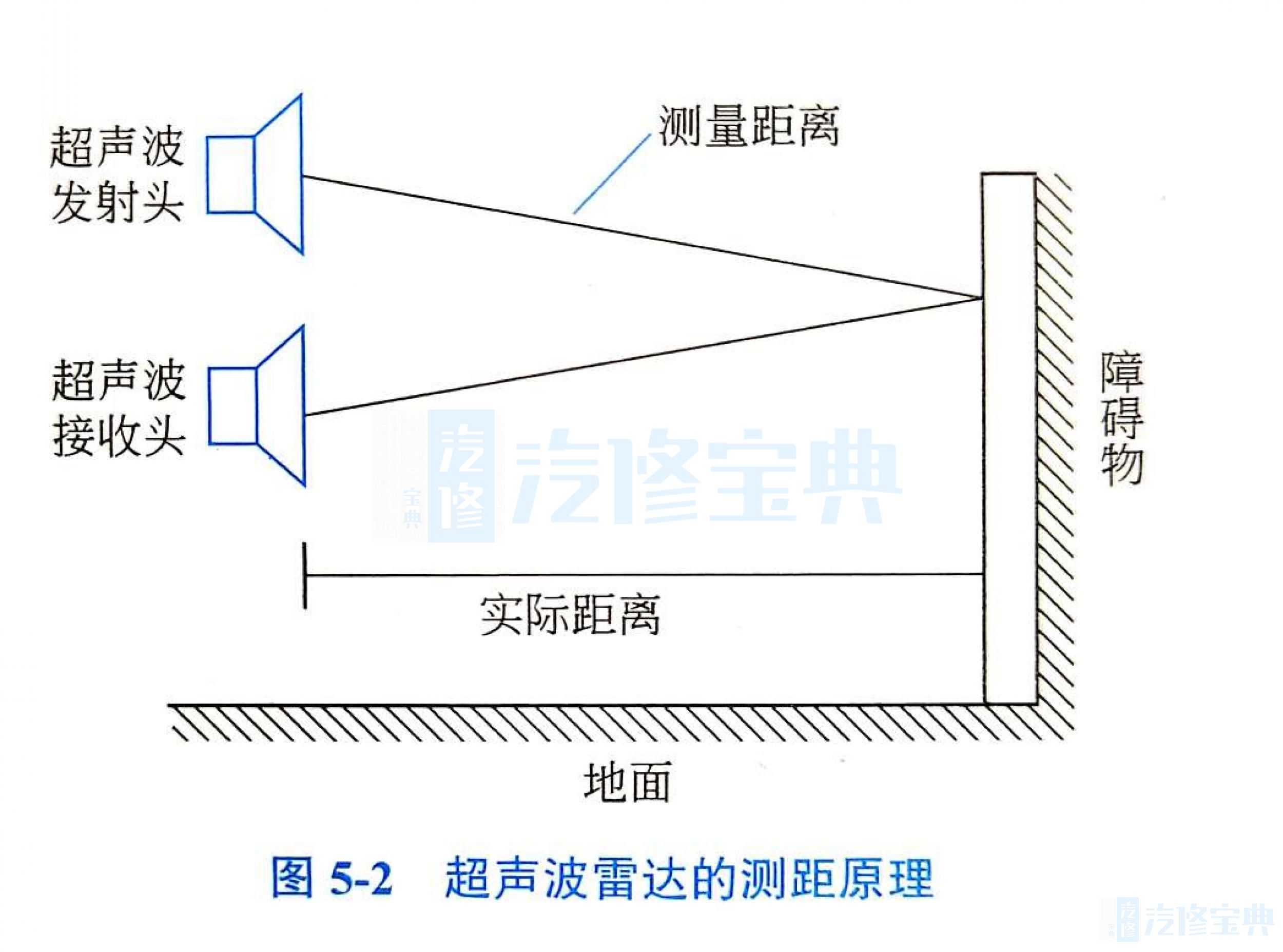
超声波雷达的测距原理如图5-2所示,超声波发射头发出的超声波脉冲经介质(空气)传到障碍物表面,反射后通过介质(空气)传到接收头,测出超声脉冲从发射到接收所需的时间,根据介质中的声速,求得从探头到障碍物表面之间的距离。设探头到障碍物表面的距离为L,超声波在空气中的传播速度为v(约为340m/s),从发射到接收所需的传播时间为t,当发射器和接收器之间的距离远小于探头到障碍物之间的距离时,则有L=vt/2。只要能测出传播时间,即可求出测量距离。
3.超声波雷达的技术参数。
超声波雷达的技术参数主要有测量距离、测量精度、探测角度、工作频率和工作温度等。
(1)测量距离超声波雷达的测量距离取决于其使用的波长和频率;波长越频率越小,测量距离越大。测量汽车前后障碍物的短距超声波雷达测量距离般为0.15~2.50m;安装在汽车侧面、用于测量侧方障碍物距离的长距超声波雷达测量距离一般为0.30~5.0m。
(2)测量精度测量精度是指传感器测量值与真实值的偏差。超声波雷达测量精度主要受被测物体体积、表面形状、表面材料等影响。被测物体体积过小表面形状凹凸不平、物体材料吸收声波等情况都会降低超声传感器测量精度。测量精度越高,感知信息越可靠。测量精度要求在±10cm以内。
(3)探测角度由于超声波雷达发射出去的超声波具有一定的指向性,波束的截面类似椭圆形,所以探测的范围有一定限度,探测角度分为水平视场角和垂直视场角(4)工作频率工作频率直接影响超声波的扩散和吸收损失、障碍物反射损失、背景噪声,并直接决定传感器的尺寸。发射频率要求是(40±2)kHz,这样传感器方向性尖锐,且避开了噪声,提高了信噪比:虽然传播损失相对低频有所增加,但不会给发射和接收带来困难。
(5)工作温度由于超声波雷达应用广泛,有的应用场景要求温度很高,有的应用场景要求温度很低,因此,超声波雷达必须满足工作温度的要求。工作温度一般要求-30~+80℃。
4.超声波雷达的特点。
超声波雷达具有以下优点。
①超声波雷达的频率都相对固定,例如汽车上用的超声波雷达,频率有40kHz、48kHz和58kHz等,频率不同,探测的范围也不同。
②超声波雷达结构简单,体积小,成本低,信息处理简单可靠,易于小型化与集成化,并且可以进行实时控制。
③超声波雷达灵敏度较高。
④超声波雷达抗环境干扰能力强,对天气变化不敏感。
⑤超声波雷达可在室内、黑暗中使用。
超声波雷达具有以下不足:
①超声波雷达探测距离短,一般为3~5m,因此应用范围受到限制。
②超声波雷达适合于低速,在速度很高的情况下测量距离具有一定的局限性。
③超声波有一定的扩散角,只能测量距离,不可以测量方位,所以只能在低速时使用,而且必须在汽车的前、后保险杠不同方位上安装多个超声波雷达。
④对于低矮、圆锥、过细的障碍物或者沟坎,超声波雷达不容易探测到。
⑤超声波的发射信号和余振的信号都会对回波信号造成覆盖或者干扰,因此在低于某一距离后就会丧失探测功能,这就是普通超声波雷达的探测有盲区的原因之一,若在盲区内,则系统无法探测障碍物。因此,比较好的解决办法是在安装超声波雷达的同时安装摄像头。
5.超声波雷达的类型及应用。
智能网联汽车上常见的超声波雷达有两种:第一种是安装在汽车前后保险杠上的,也就是用于探测汽车前后障碍物的传感器,测量距离一般为0.15~2.5m,称为驻车辅助传感器(UPA);第二种是安装在汽车侧面的,用于测量停车位长度的超声波雷达,测量距离一般为0.30~50m,称为泊车辅助传感器(APA)。
超声波雷达主要用于自动泊车辅助系统。自动泊车辅助系统在汽车低速巡航时,使用超声波雷达感知周围环境,帮助驾驶员找到尺寸合适的空车位,并在驾驶员发送泊车指令后,将汽车泊入车位自动泊车辅助系统使用的传感器包括8个安装于汽车前、后的UPA超声波雷达和4个安装于汽车两侧的APA超声波雷达,雷达的感知范围如图5-3所示。
APA超声波雷达的探测范围远而窄,常见APA最远测量距离为5m:UPA超声波雷达的探测范围近而宽,常见的UPA测量距离为3m。不同的探测范围决定了他们不同的分工。
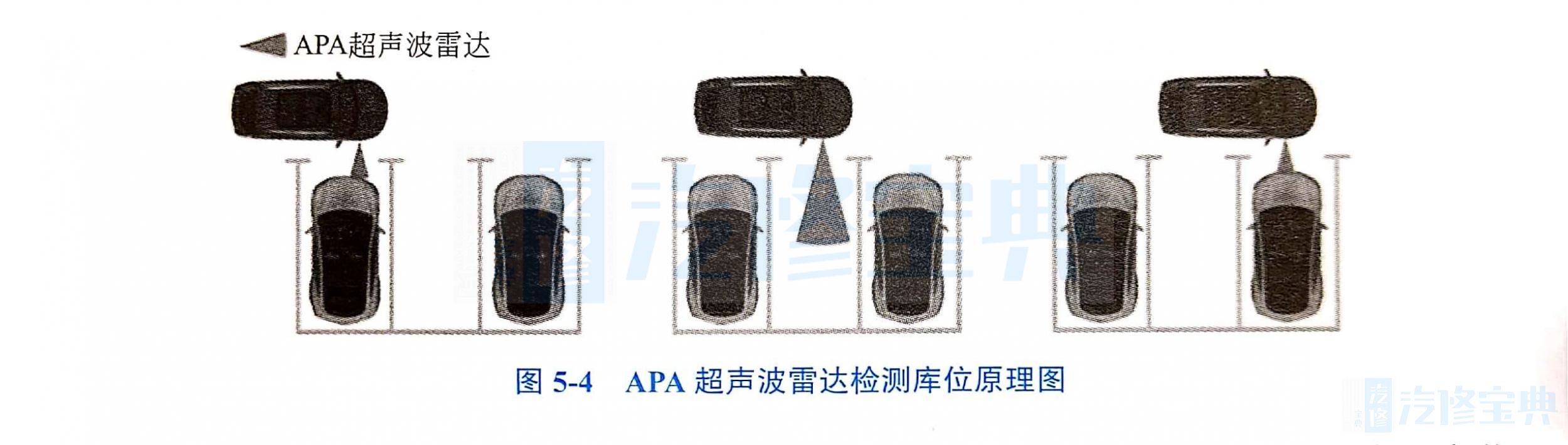
APA超声波雷达的作用是在汽车低速巡航时,完成空库位的寻找和校验工作如图5-4所示,随着汽车低速行驶过空库位,安装在前侧方的APA超声波雷达的测量距离有一个先变小,再变大,再变小的过程旦汽车控制器探测到这个过程,可以根据车速等信息得到库位的宽度以及是否是空库位的信息。后侧方的APA在汽车低速巡航时也会探测到类似的信息,可根据这些信息对空库位进行校验,避免误检。
使用APA超声波雷达检测到空库位后,汽车控制器会根据自车的尺寸和库位
的大小,规划出一条合理的泊车轨迹,控制转向盘、变速器和油门踏板进行自动泊车。在泊车过程中,安装在汽车前后的8个UPA会实时感知环境信息,实时修正泊车轨迹,避免碰撞。
自动泊车辅助需要驾驶员在车内实时监控,以保证泊车顺利完成,属于SAEL2级别的自动驾驶技术。