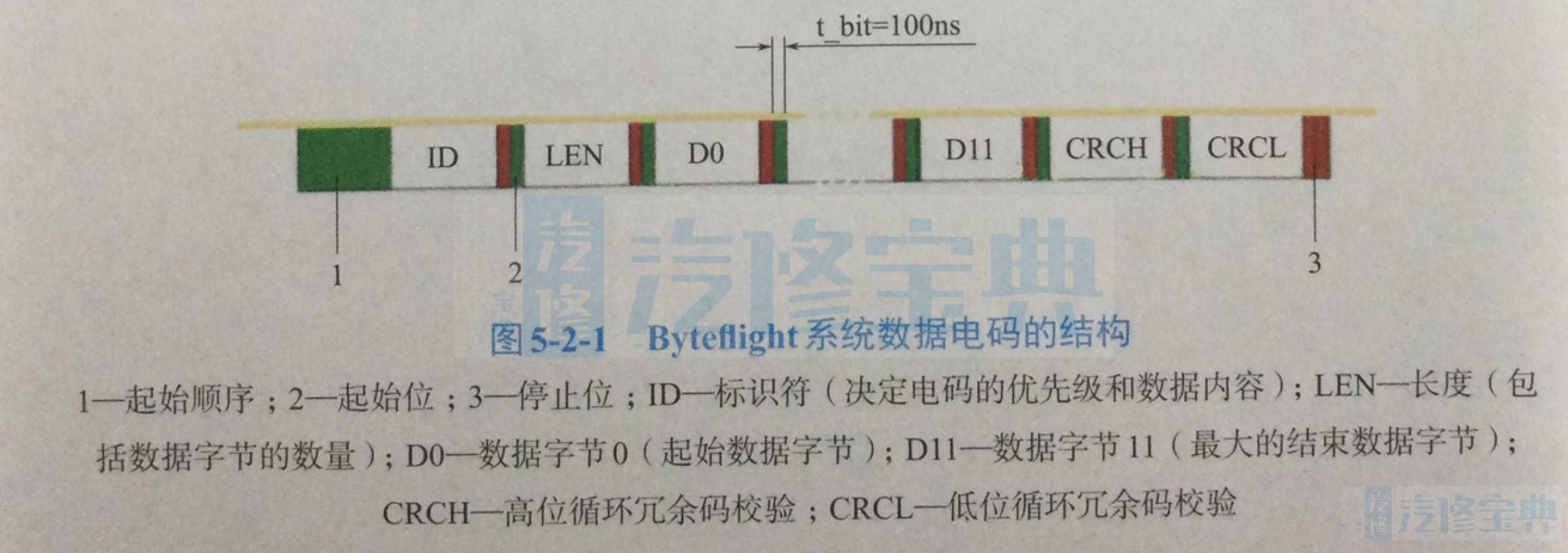
1. Byteflight系统的数据结构: 同CAN总线一样,数据也通过数据电码传输,除数据字节的数量外,数据电码结构完全相同。 Byteflight系统可传输最长为12个字节的数据(图5-2-1)。
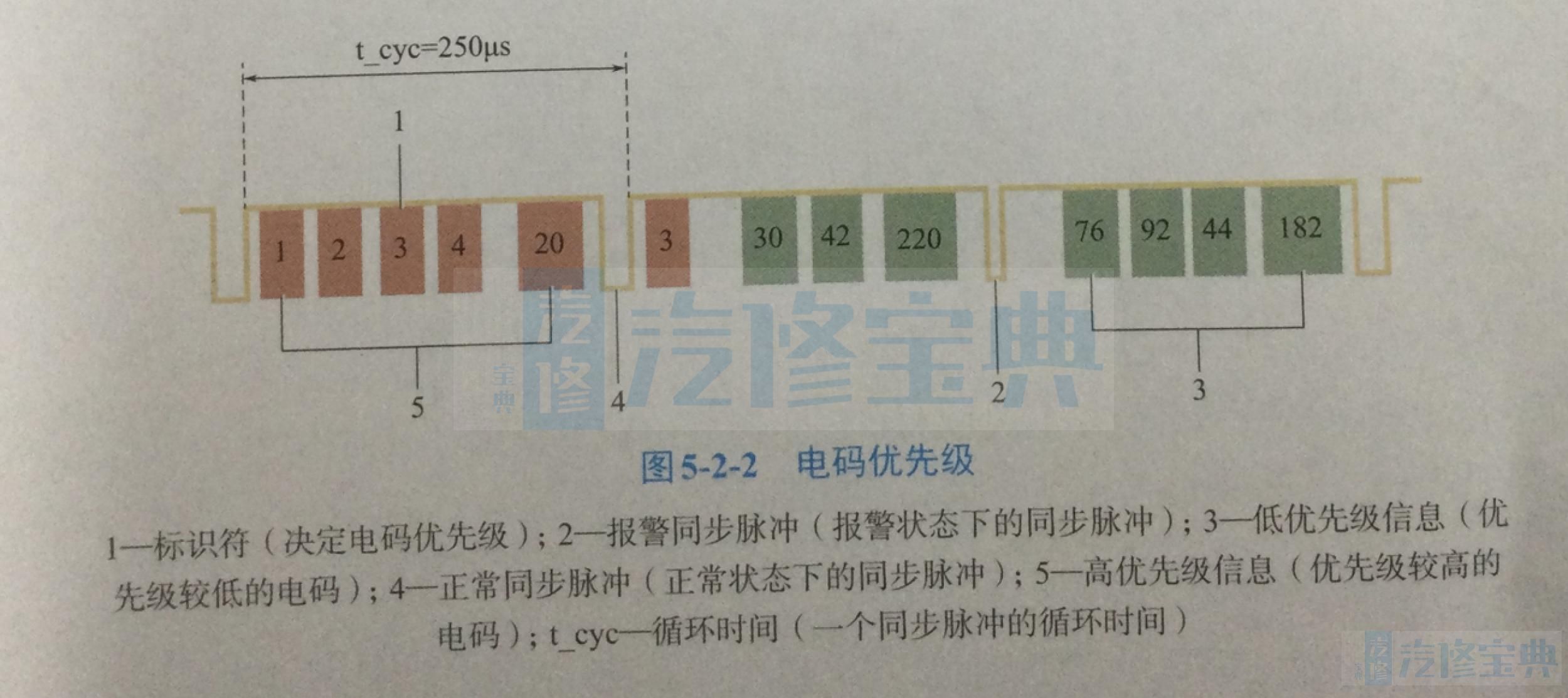
Byteflight系统数据电码分为优先级较高的电码和优先级较低的电码两类。数据优先级通过标识符进行识别。标识符允许范围在1~255之间,其中1表示最高优先级。优先级较高的信息是碰撞传感器发来的数据,而优先级较低的信息一般是系统状态信息和系统故障诊断信息(图5-2-2)。
2.卫星式控制单元:
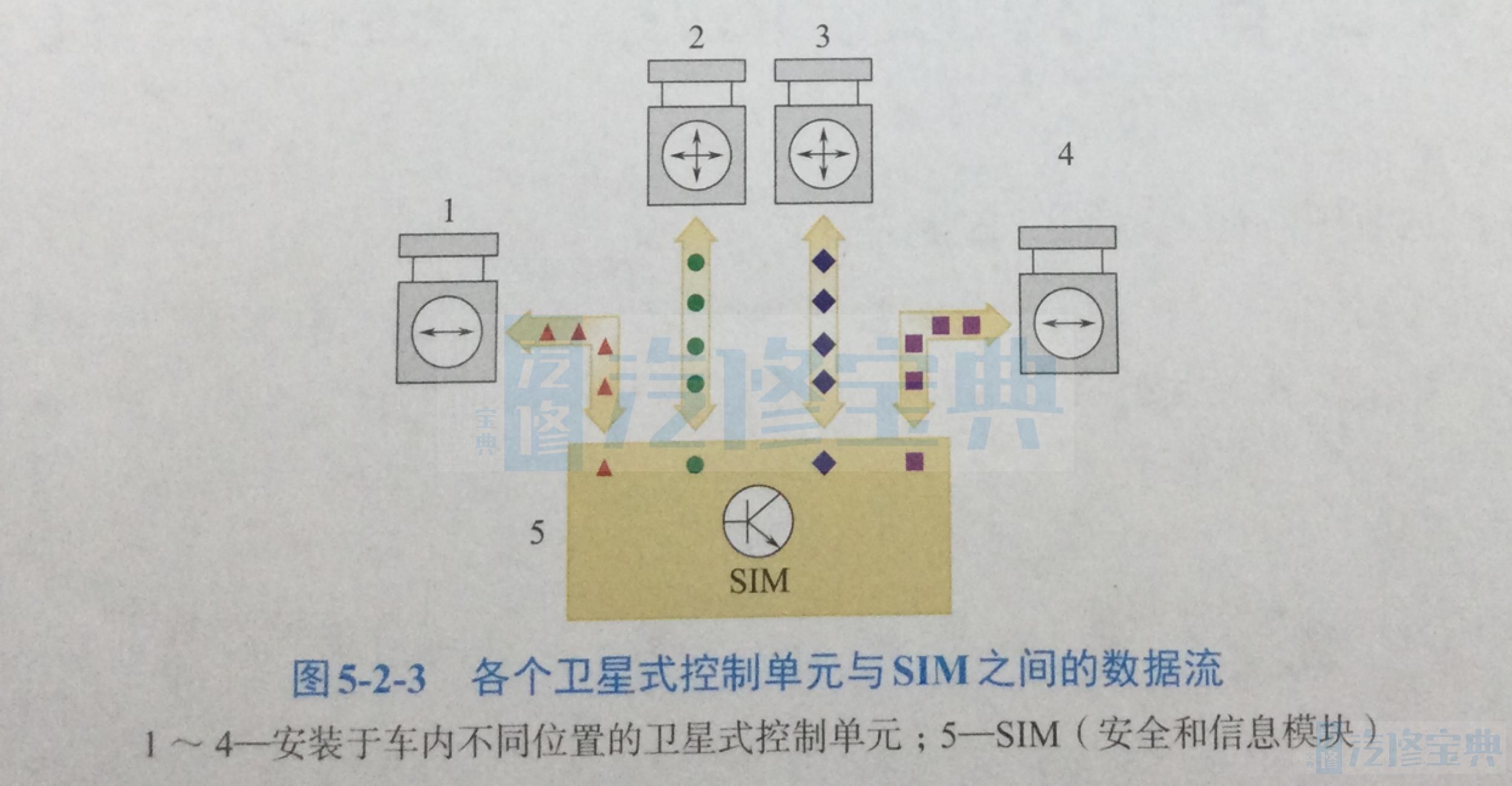
卫星式控制单元与主控制单元之间的电码始终以起始顺序为开始,接下来是一个标识符。数据电码的优先级通过该标识符确定。系统不断查询所有碰撞传感器信
息并将数据分配给 Byteflight系统所有控制单元(图5-2-3)。
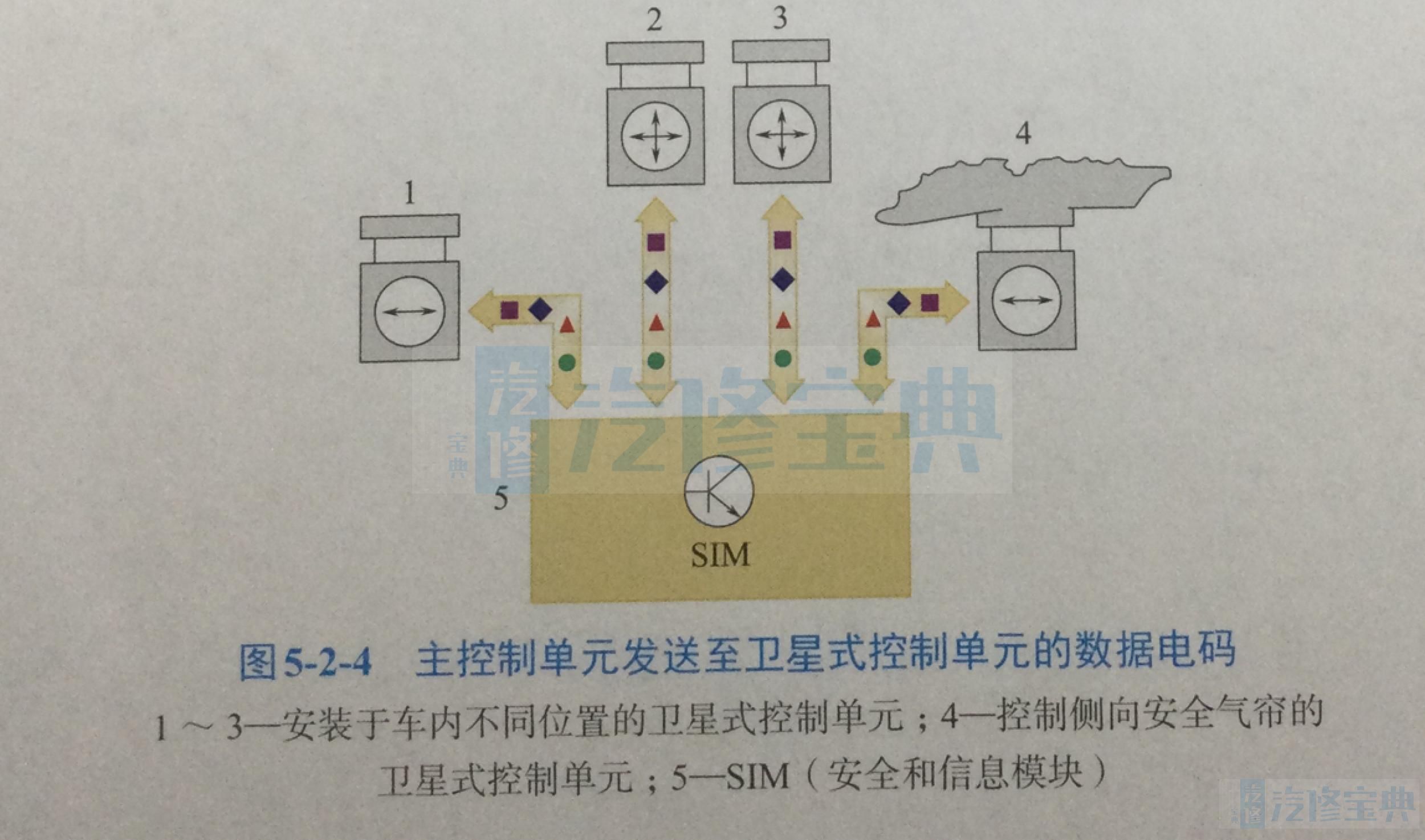
主控制单元(SIM)将卫星式控制单元提供的数据电码向系统内的所有卫星式控制单元发布。卫星式控制单元视碰撞的剧烈程度决定由其控制的气囊是否触发以及触发强度(图5-2-4)。
控制侧向安全气帘的卫星式控制单元已经发出触发安全气帘的指令,且该安全气帘已经触发(即引爆器引爆,安全气帘膨开)。
3.总线访问程序:
Byteflight系统根据规定的时间间隔分配来控制总线访问情况。执行这个控制程序时,只能在规定时间内发送特定信息,该信息通过其标识符进行识别。
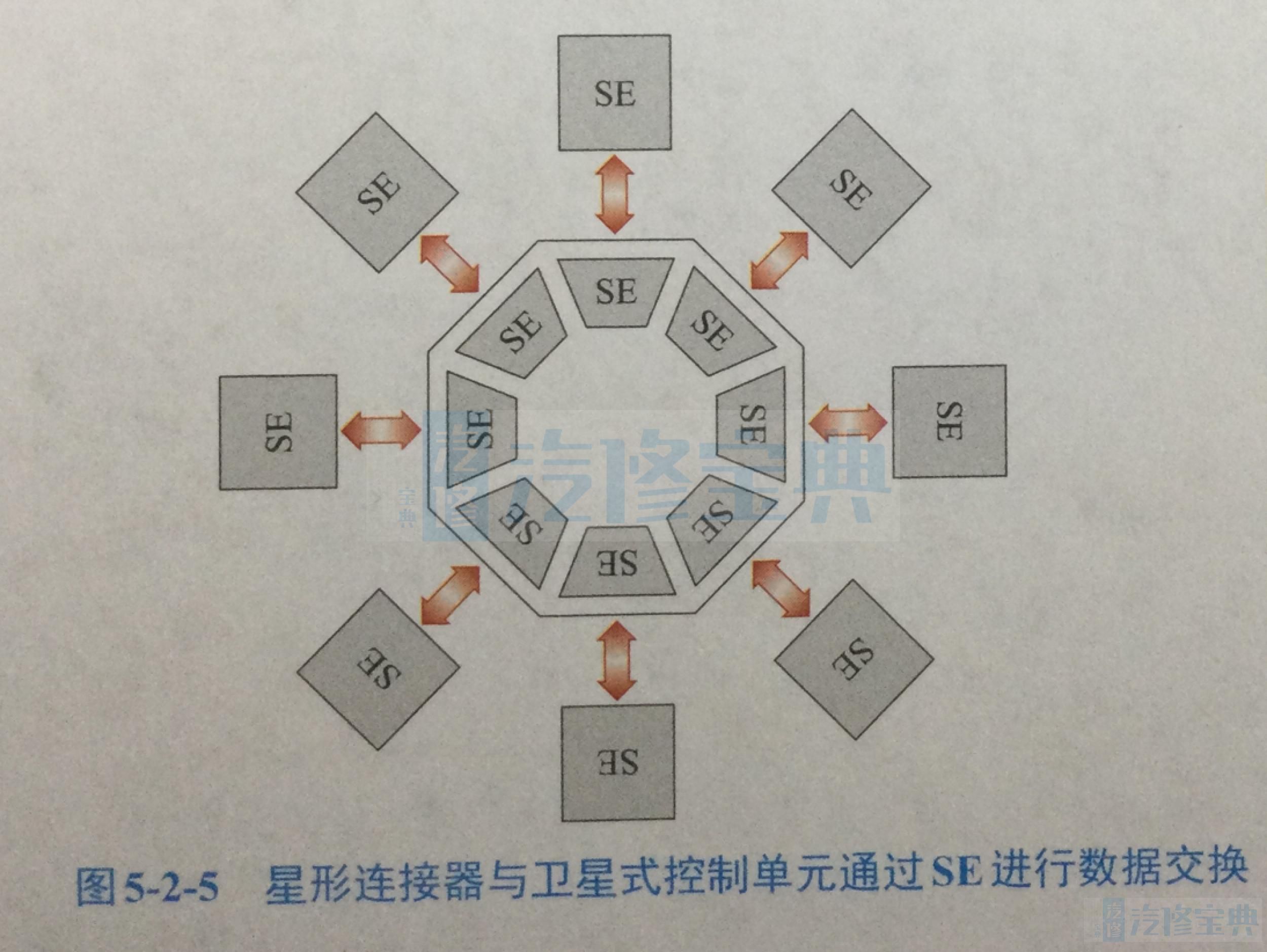
4.发送和接收模块:
发送和接收模块能够将电信号转变为光信号并通过光导纤维传输。每个卫星式
控制单元都有一个电子光学发送和接收模块(SE)。
这些SE模块分别通过光导纤维连接在SM内的智能型星形连接器上。SM内也有用于与各个卫星式控制单元交换数据的发送和接收模块SE(图5-2-5)。
5. Byteflight系统主控单元:
Byteflight系统主控单元执行两个任务,一是产生同步脉冲( Sync Pulse),二是使卫星式控制单元进入报警模式。
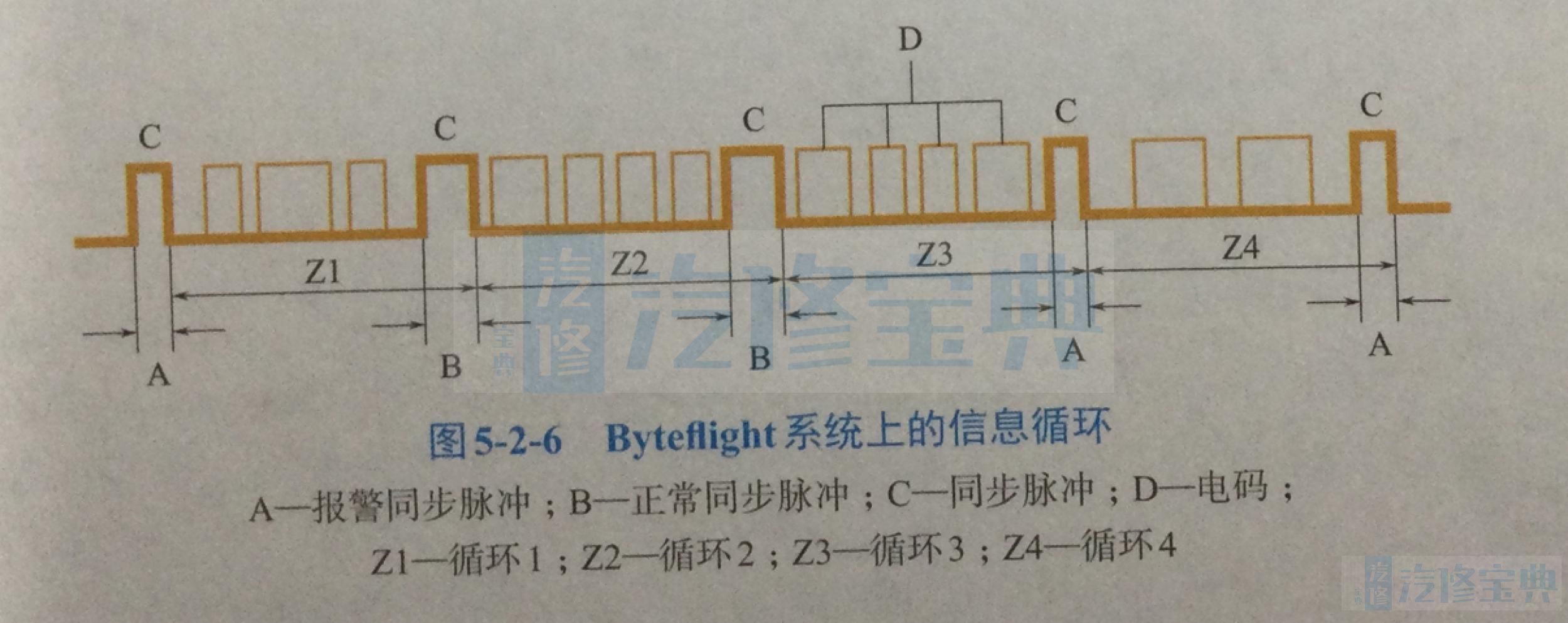
6.同步脉冲:
SIM内的 Byteflight系统主控单元以250μs为时间间隔发送同步脉冲。报警模式通过同步脉冲宽度发送。处于报警状态时,一个同步脉冲的持续时间约为2 μ s。同步脉冲时间通常约为3μs(图5-2-6)。
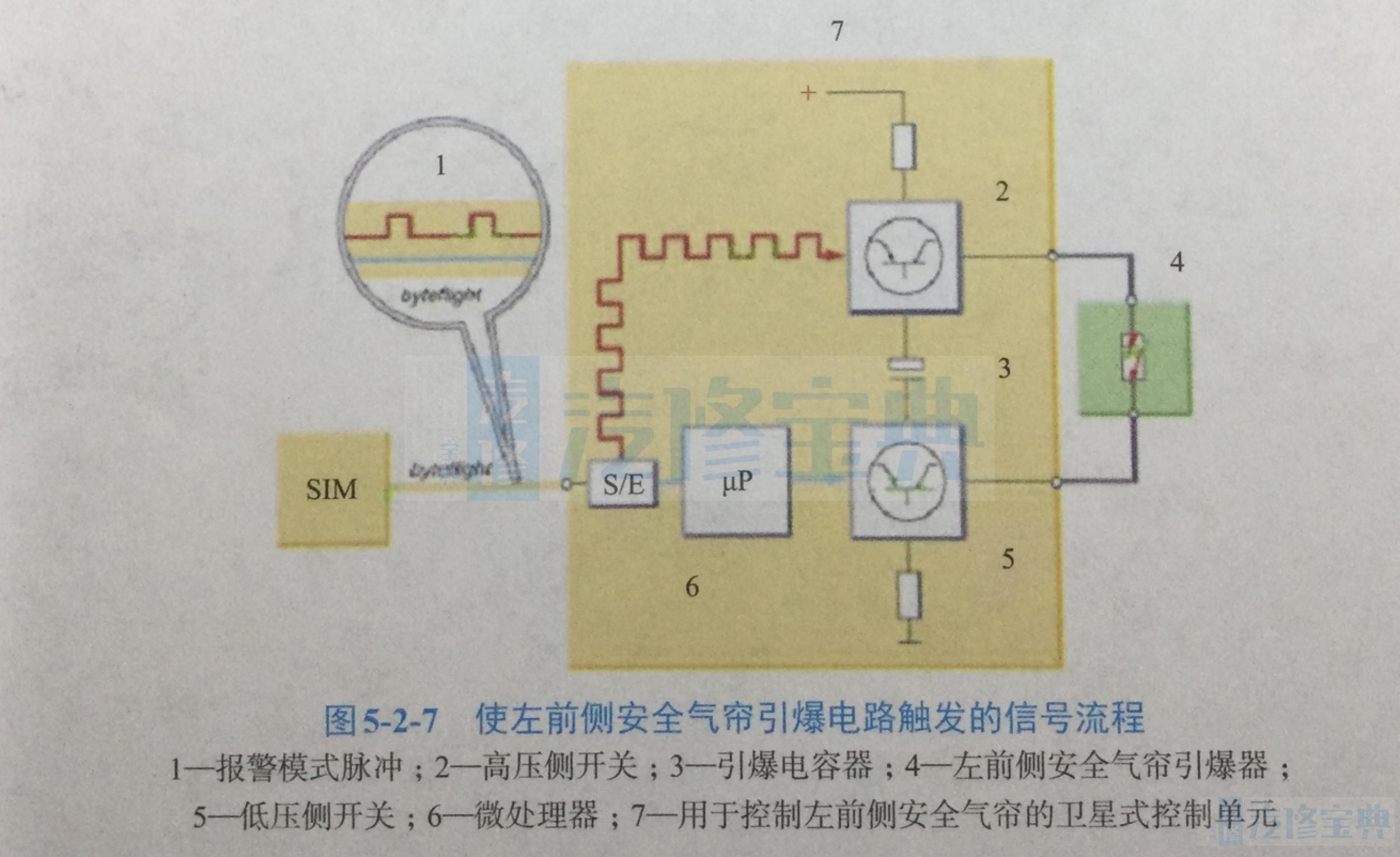
总线主控单元必须根据所有碰撞传感器发送的信息决定是否将卫星式控制单元设为报警模式。由主控单元设置报警模式后,安全系统的所有引爆电路都将设为
准备触发状态。需要触发一个引爆输出级时,必须始终将两个独立的信号传输到Byteflight系统上(图5-2-7)。