随着电子控制技术的发展,汽车上的电控系统不断增多,导致汽车上的线路也越来越复杂。为了满足不同电控系统之间快速可靠地分享数据信息,减少汽车线路复杂性,现在越来越多的车辆采用车辆通信网络。 车辆通信网络是指借助双绞线、同轴电缆或光纤等通信介质,将车内众多控制模块联结起来,使若干的传感器、执行机构和控制模块共用一个公共的数据通道,通过某种通信协议,在网络控制器的管理下共享传输通道和数据。如图11-1所示,控制模块并联在网络上,既可以向网络上发送其他模块需要的信息,也可以从网络上接受自身需要的信息,信息的优先级别由网络控制器控制。这些传输的信息如同公交汽车在公路上行驶,因此这种网络形象地被称为CAN-Bus( Controller Area Network-Bus),即控制局域网总线。
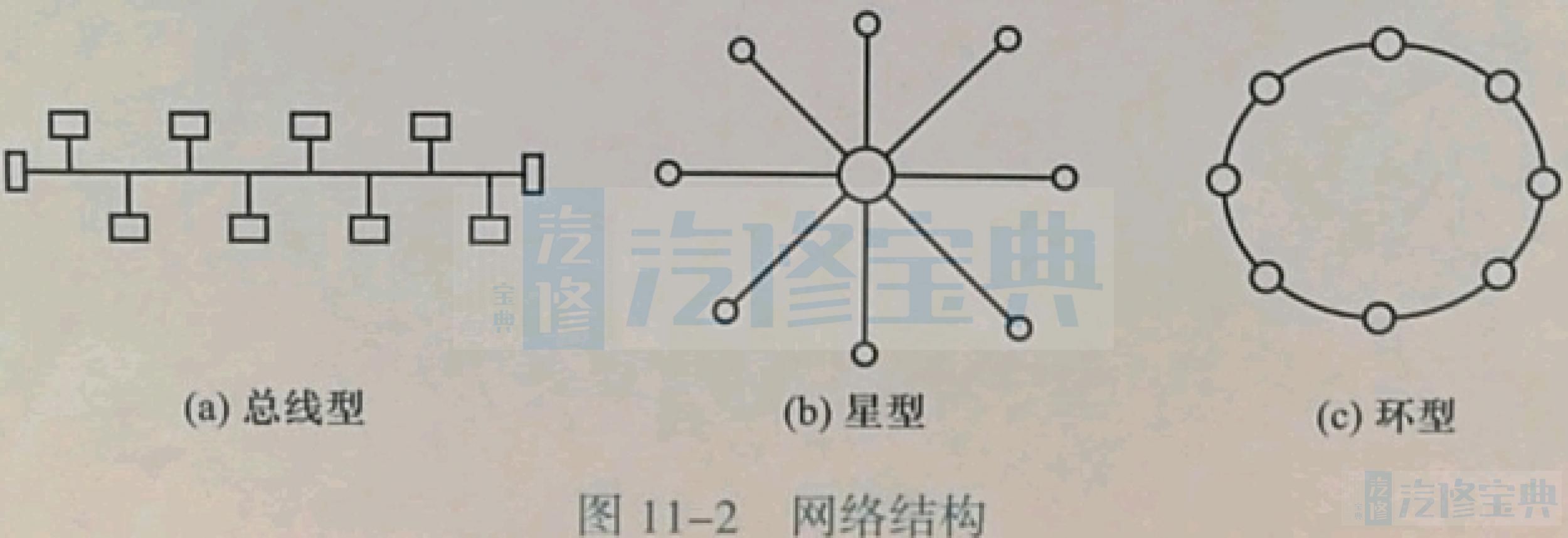
目前,常见的汽车网络有控制器局域网CAN( Controller Area Network)内部互联网络LIN( Local Interconnect Networks)、车内局域网络LAN(In- Vehicle Local Area Network)和媒体导向系统传输网络MOST( Media Oriented System Transport)。汽车网络常见的结构有总线型结构、星型结构、环型结构等,如图11-2所示。本单元主要介绍上汽通用汽车上使用的GMLAN、LN和MOST网络,其中, GMLAN网络又分高速、中速、低速三种。
汽车通信网络和传统汽车上控制模块和传感器之间点对点的连接方式相比具有以下优点:
①减少传感器和信号线数量。
②大大减轻线束的重量。
③减少控制模块连接器上的插头。
④提高可靠性和可维修性。