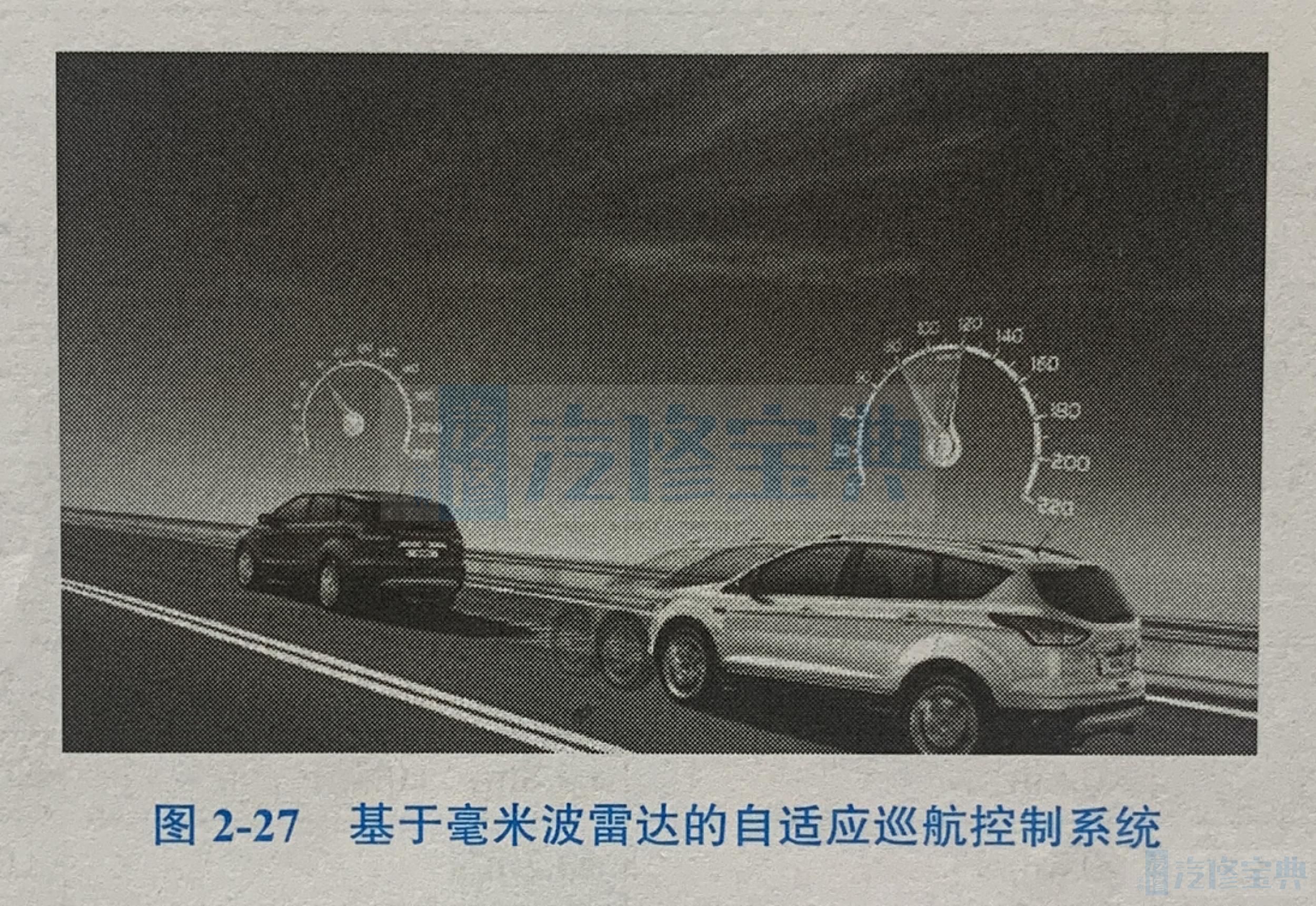
毫米波雷达在智能网联汽车上的应用主要有自适应巡航控制系统、前向碰撞预警系统、自动制动辅助系统、盲区监测系统、变道辅助系统等先进驾驶辅助系统。 (1)自适应巡航控制系统自适应巡航控制系统是一种可以依据设定的车速或距离跟随前方车辆行驶,或根据前车速度主动控制本车行驶速度,最终将车辆与前车保持在安全距离的辅助驾驶功能,该功能最大的优点是可以有效地解放驾驶员的双脚,提高驾驶的舒适性,如图2-27所示。
(2)前向碰撞预警系统前向碰撞预警系统是通过毫米波雷达和前置摄像头不断监测前方的车辆,判断本车与前车之间的距离、方位及相对速度,探测到前方潜在的碰撞危险,当驾驶员没有采取制动措施时,仪表会显示报警信息并伴随声音报警,警告驾驶员务必采取应对措施,如图2-28所示。当判断到事故即将发生时,系统会让制动自动介入工作,从而避免事故发生或降低事故可能造成的风险。
(3)自动制动辅助系统自动制动辅助系统是利用毫米波雷达测出与前车或障碍物的距离,然后利用数据分析模块将测出的距离与警报距离、安全距离进行比较,小于警报距离时就进行警报提示,而小于安全距离时,即使在驾驶员没有来得及踩制动踏板的情况下,该系统也会启动,使汽车自动制动,从而确保驾驶安全,如图2-29所示。
据研究表明,90%的交通事故是由于驾驶员的注意力不集中而引起的,自动制动辅助技术能减少38%的追尾碰撞。且无论是在城市道路(限速60kmh)还是郊区道路行驶的情况下,效果都显著。
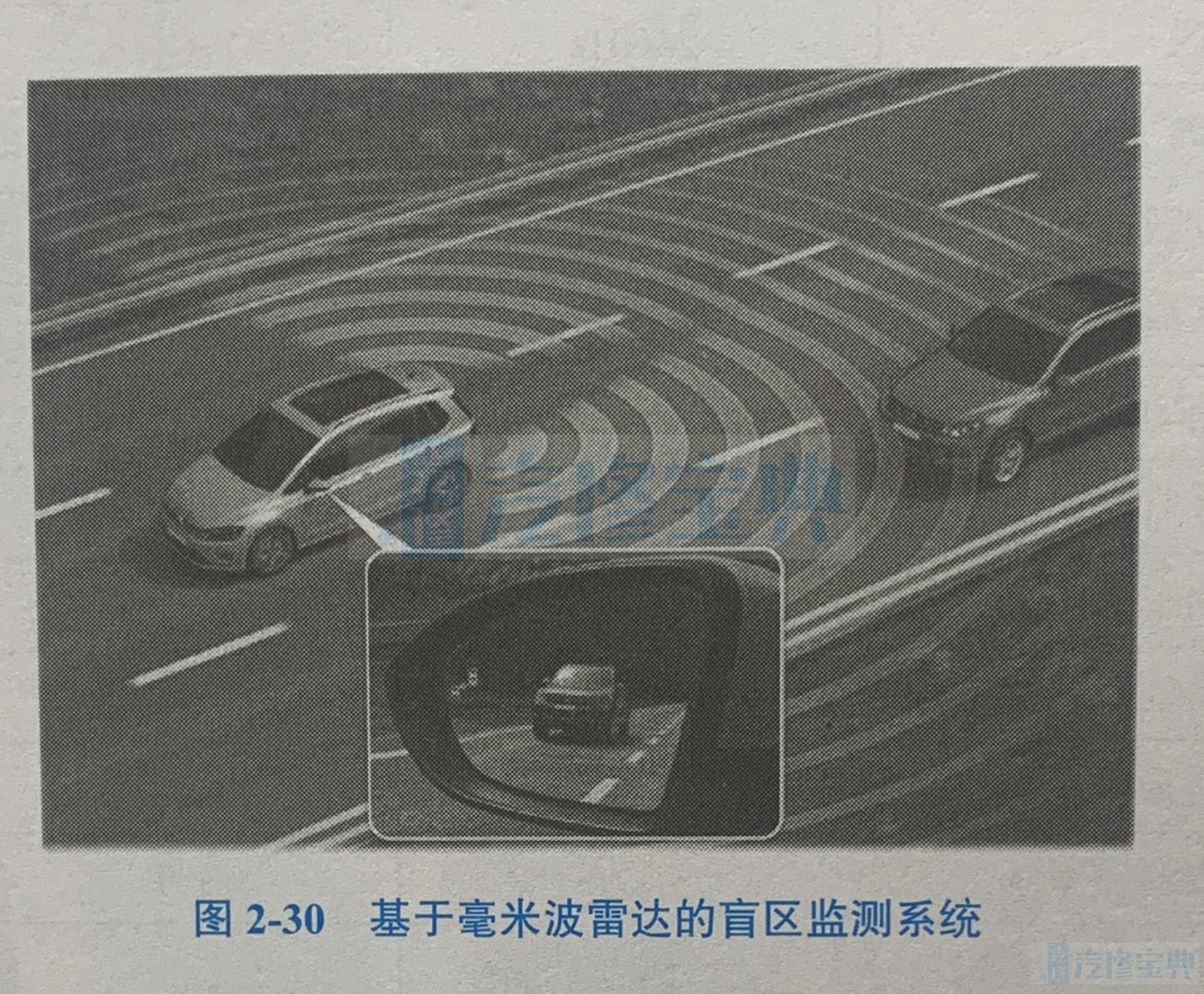
(4)盲区监测系统盲区监测系统根据毫米波雷达判断移动物体所处的相对位置及与本车的相对速度,当处于本车的盲区范围内,及时提醒驾驶员注意变道出现的风险,如图2-30所示。
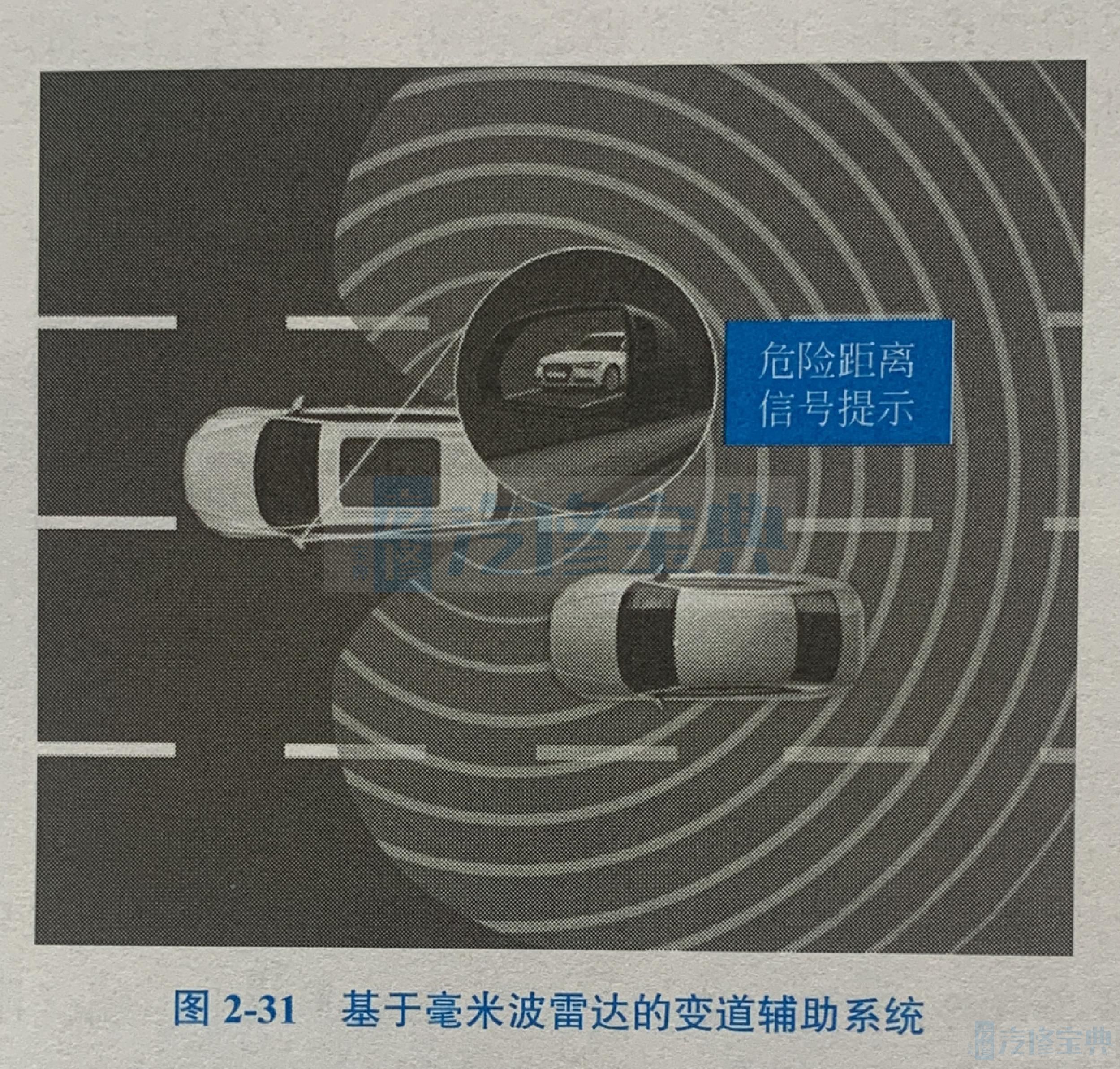
(5)变道辅助系统变道辅助系统是通过毫米波雷达、摄像头等传感器,对车辆相邻两侧车道及后方进行探测,获取车辆侧方及后方物体的运动信息,并结合当前车辆的状态进行判断,最终以声、光等方式提醒驾驶员,让驾驶员掌握最佳变道时机,防止变道引发的交通事故,同时对后向碰撞也有比较好的预防作用。
变道辅助系统包括盲区监测、变道预警和后向碰撞预警3个功能,可以有效地防止变道、转弯、后方追尾等交通事故的发生,极大提升了汽车变道操作的安全性能,如图2-31所示。
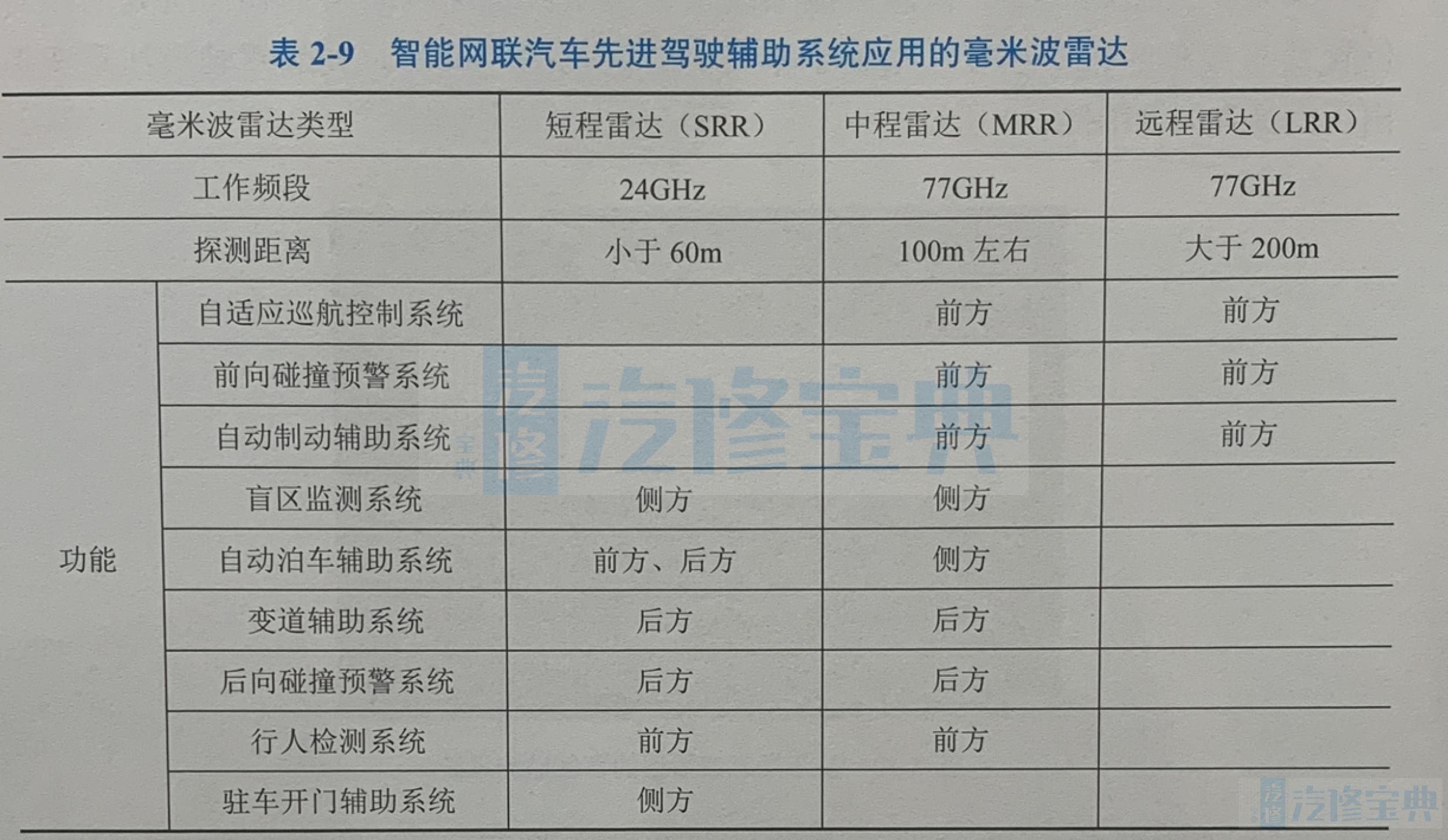
智能网联汽车先进驾驶辅助系统应用的毫米波雷达见表2-9。
为了满足不同距离范围的探测需要,一辆汽车上会安装多个短程、中程和远程毫米波雷达。其中24GHz毫米波雷达主要实现短程(SRR)探测,7GHz毫米波雷达主要实现中程(MR)和远程(LRR)的探测。不同的毫米波雷达在车辆前方、侧方和后方发挥不同的作用。
由于毫米波雷达技术在不断发展,技术参数也在不断变化,本节列出的毫米波雷达参数仅供参考,最终以企业提供的产品技术参数为准。