

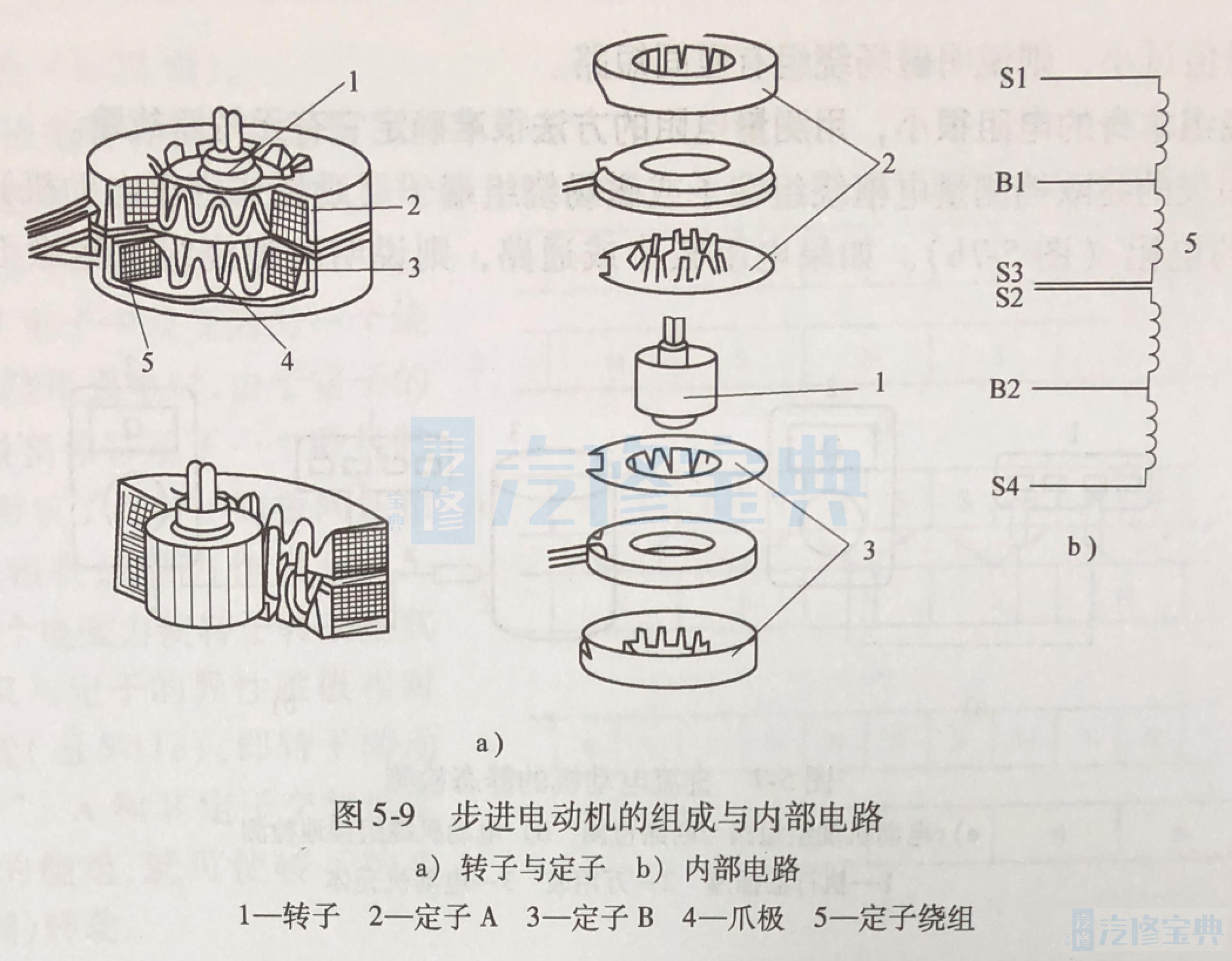
步进电动机通过定子磁极的旋转,带动转子转动。步进电动机按“步”转动,可准确控制其转动的角度,通过相应的机械传动实现对控制对象的参量调节和定位控制。 步进电动机主要由永久磁铁的转子和绕有两个绕组的定子组成,其组成部件及内部电路如图5-9所示。 步进电动机的结构形式与普通的电动机有较大的差别。步进电动机的转子由极性交错排列的永久磁铁构成,通常采用8对磁极;定子有A、B两个,每个定子中又有两个绕向相反的绕组,集中绕在环状的磁轭上,内圈有8对爪极状的铁心固定在磁轭的两端。当两个定子绕组中的一个通电时,就会将两端的铁心磁化成N极和S极,形成8对N极和S极相间排列的爪极。两个定子的爪极错位安装,就形成16对(32个)相间排列的N极和S极。





返回顶部