背景
车型:奔驰S350,W221,配置M272发动机和722.9变速器。VIN:WDDNG56XX7A××××××。行驶里程:121750km。
现象
客户投诉,车辆向右跑偏。
试车,行驶速度大约90km/h时方向向右跑偏。
分析
根据现象判断,此种故障可能有以下几种原因引起:
01 轮胎(左右磨损程度不一或者轮胎侧滑,轮胎侧滑也是引起跑偏的重要因素之一);
02 轮胎气压;
03 底盘整体或各个部件工况;
04 四轮定位数据值等。
方案
接车后首先检查轮胎是否有异常磨损(偏磨和左右胎新旧程度)、检查底盘,目视检查悬挂转向系统中的各个支臂拉杆、车轮和转向节。这三者之间的安装具有一定的相对位置,
这种具有一定相对位置的安装主控转向,其中主销后倾(角)、主销内倾(角)、前轮外倾(角)和前轮前束等,这些控制或连接车轮定位的部件都未发现异常。标定胎压、车身高度及测量轴距后也均未发现异常。做四轮定位,观察数据,显示数值都在标准范围之内。就数据而言,正常情况下左侧主销后倾角略小,应该往左跑偏,可这明显与实际相反。根据诊断仪将左侧调整至标准值范围。再次试车,仍不尽人意。
以往的跑偏车辆将底盘调整一次基本就不会跑偏了,但此车已调整几次,却一点效果也没有,不由让人疑惑不解。怀疑跑偏与底盘无关,四轮定位调整看来不会产生效果。
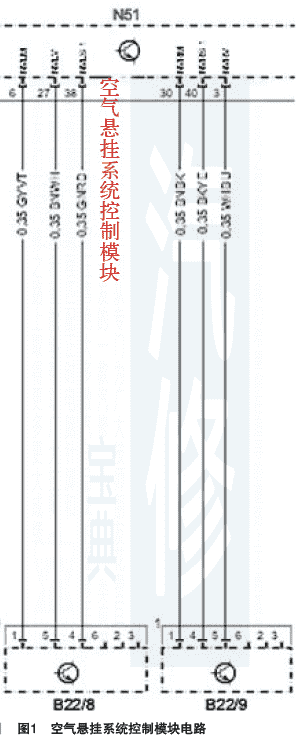
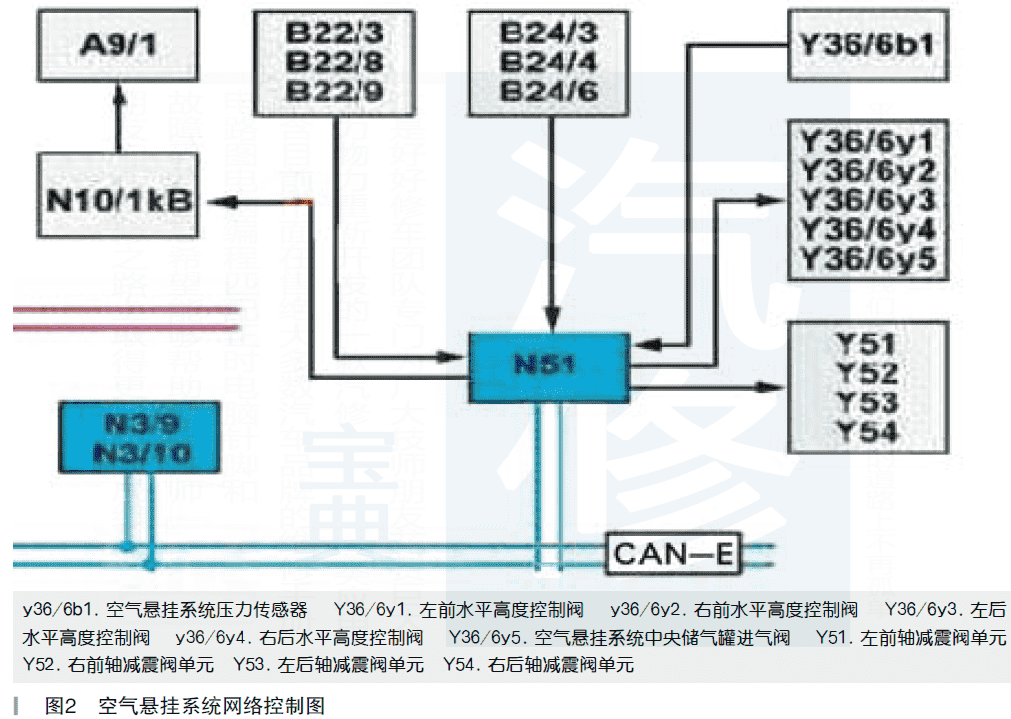
先排除四轮定位及其他四轮定位相关联部件,根据经验首先想到车身高度会很大的影响到方向跑偏,在定位之前测量过车身高度。此款车装备自动悬挂控制系统。带自动减震适应
系统(ADS)的空气悬挂系统控制模块通过直接线路读入传感器、检波器和信号后评估输入因素再促动部件,如图1、图2所示。
 可能会因为一些部件(如水平高度传感器,以前的常见故障)错误的安装影响到车身高度变化。标定车身高度时正常,但是如果安装不当随着车辆运动、震动等使传感器旷动或错
位,空气悬挂系统控制模块检测到传感器变化开始调整车身高度,收集到错误的信号发出错误的指令,使车身高度变化从而导致跑偏。用同款同配的车调换车身高度传感器,更换过程中未发现异常。更换高度传感器后重新标车身高度,调整至标准范围后试车,结果依旧,故障仍未排除。
比较常见的故障被证实无异常,继续思考可能干涉行驶方向的部件,想到此款车配备齿轮齿条式转向机构,假设齿轮之间产生过大的间隙导致方向跑偏,因为调节齿轮间隙要求比较精确,所以我们只根据以往经验作出判断并决定先不被摄入考虑范围。根据以往的经验如果间隙大会有明显的松旷并产生异响,反复试验并未有此现象。
经过一系列检查判断基本排除一些不会改变的固定部件。会不会还是行驶中某些部件基本工况变化导致的呢?再次外出试车,拿着诊断仪、尺子等。行驶过程中在行驶跑偏时观看
数据,当看到左右车身高度实际值时诊断仪检测到的左右高度实际值不一致。靠边停车拿尺子测量左右车身高度,发现左右高度相差超过5mm。这下发现了问题,现场标定了车身高
度,继续试车,试车过程中短时间跑正常,跑了一小段时间之后又开始跑偏,由此判断还是自动悬挂控制系统问题。
既然现在怀疑车身高度影响的方向跑偏,继续检查自动悬挂。前文已讲述到带自动减震适应系统(ADS)的空气悬挂系统控制模块通过直接线路读入传感器、检波器和信号后评估输入因素再促动部件。
WIS中的详细任务介绍如下:
01 带自适应减震系统(ADS)控制模块的空气悬挂系统的任务:读取传感器,检波器和信号;评估输入因素;促动部件。
02 读取传感器,检波器和信号,通过以一下连接读入输入因素:直接线路;底盘控制器区域网络(控制器区域网络总线E级(CAN))
直通线路,通过直通线路读入以下部件信息:
02-01后轴水平高度传感器(B22/3);
02-02左前水平高度传感器(B22/8);
02-03右前水平高度传感器(B22/9);
02-04空气悬挂系统压力传感器(Y36/6b1)
要检测得先了解空气悬挂控制系统,车辆自动调节其车身水平高度。即使在车辆负载时,全方位的自动车身水平高度调节也能够确保最佳悬挂和恒定的离地间隙。其中可能与此有
关系的一项功能自动下降。高速行驶时,车身水平高度会自动下降,以提高行驶的安全性和降低燃油消耗量。
自动下降功能前提条件之一,未配备4MATI C四轮驱动的车辆在车速超过100km/h时“降低”。配备4MATIC的车辆在车速超过80km/h时“降低”。
与试车现象符合( 跑到大约90km/h时向右跑偏),由此首先怀疑到减震器,再想到之前看过的一个故障现象,单个悬挂支柱激活空气悬挂左侧可以正常升降,右侧可以升起,但激活降落时只可以降落到一半。那时的诊断结果是减震器内部问题。这种现象很好验证,只是单个激活减震支柱就可以了。激活本车时未发现异常,减震器可上下自由激活。且在平坦地面停放一夜并未出现车身倾斜现象(未漏气),证明不是减震器本身问题。
在车身高度调节中的三项:
01 读入传感器、检波器和信号
02 评估输入因素
03 促动部件
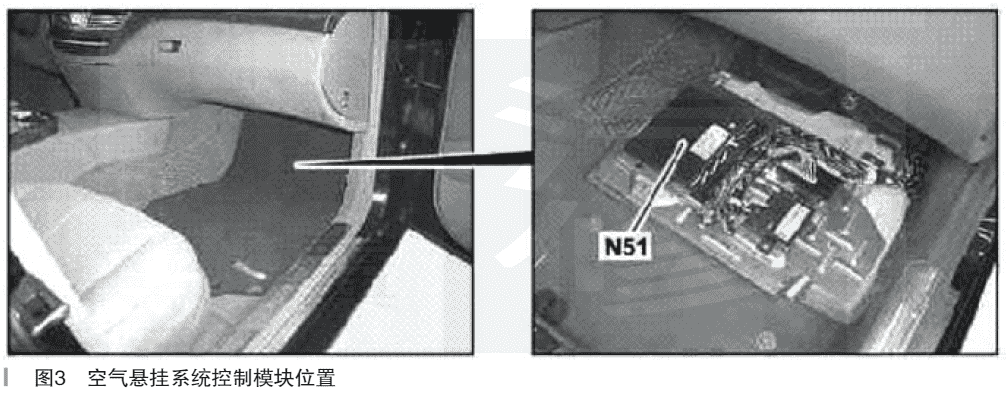
重新理顺思路,这三项可以理解为控制模块检测传感器信号,评估输入原因就是控制模块处理,控制模块将检测的信号综合的作出判断及处理后命令其促动的部件工作。前文基本
将传感器和减震器排除。那么就剩下控制模块检测处理这一环节,也就是空气悬挂系统控制模块N51,位置如图3所示。
可能会因为一些部件(如水平高度传感器,以前的常见故障)错误的安装影响到车身高度变化。标定车身高度时正常,但是如果安装不当随着车辆运动、震动等使传感器旷动或错
位,空气悬挂系统控制模块检测到传感器变化开始调整车身高度,收集到错误的信号发出错误的指令,使车身高度变化从而导致跑偏。用同款同配的车调换车身高度传感器,更换过程中未发现异常。更换高度传感器后重新标车身高度,调整至标准范围后试车,结果依旧,故障仍未排除。
比较常见的故障被证实无异常,继续思考可能干涉行驶方向的部件,想到此款车配备齿轮齿条式转向机构,假设齿轮之间产生过大的间隙导致方向跑偏,因为调节齿轮间隙要求比较精确,所以我们只根据以往经验作出判断并决定先不被摄入考虑范围。根据以往的经验如果间隙大会有明显的松旷并产生异响,反复试验并未有此现象。
经过一系列检查判断基本排除一些不会改变的固定部件。会不会还是行驶中某些部件基本工况变化导致的呢?再次外出试车,拿着诊断仪、尺子等。行驶过程中在行驶跑偏时观看
数据,当看到左右车身高度实际值时诊断仪检测到的左右高度实际值不一致。靠边停车拿尺子测量左右车身高度,发现左右高度相差超过5mm。这下发现了问题,现场标定了车身高
度,继续试车,试车过程中短时间跑正常,跑了一小段时间之后又开始跑偏,由此判断还是自动悬挂控制系统问题。
既然现在怀疑车身高度影响的方向跑偏,继续检查自动悬挂。前文已讲述到带自动减震适应系统(ADS)的空气悬挂系统控制模块通过直接线路读入传感器、检波器和信号后评估输入因素再促动部件。
WIS中的详细任务介绍如下:
01 带自适应减震系统(ADS)控制模块的空气悬挂系统的任务:读取传感器,检波器和信号;评估输入因素;促动部件。
02 读取传感器,检波器和信号,通过以一下连接读入输入因素:直接线路;底盘控制器区域网络(控制器区域网络总线E级(CAN))
直通线路,通过直通线路读入以下部件信息:
02-01后轴水平高度传感器(B22/3);
02-02左前水平高度传感器(B22/8);
02-03右前水平高度传感器(B22/9);
02-04空气悬挂系统压力传感器(Y36/6b1)
要检测得先了解空气悬挂控制系统,车辆自动调节其车身水平高度。即使在车辆负载时,全方位的自动车身水平高度调节也能够确保最佳悬挂和恒定的离地间隙。其中可能与此有
关系的一项功能自动下降。高速行驶时,车身水平高度会自动下降,以提高行驶的安全性和降低燃油消耗量。
自动下降功能前提条件之一,未配备4MATI C四轮驱动的车辆在车速超过100km/h时“降低”。配备4MATIC的车辆在车速超过80km/h时“降低”。
与试车现象符合( 跑到大约90km/h时向右跑偏),由此首先怀疑到减震器,再想到之前看过的一个故障现象,单个悬挂支柱激活空气悬挂左侧可以正常升降,右侧可以升起,但激活降落时只可以降落到一半。那时的诊断结果是减震器内部问题。这种现象很好验证,只是单个激活减震支柱就可以了。激活本车时未发现异常,减震器可上下自由激活。且在平坦地面停放一夜并未出现车身倾斜现象(未漏气),证明不是减震器本身问题。
在车身高度调节中的三项:
01 读入传感器、检波器和信号
02 评估输入因素
03 促动部件
重新理顺思路,这三项可以理解为控制模块检测传感器信号,评估输入原因就是控制模块处理,控制模块将检测的信号综合的作出判断及处理后命令其促动的部件工作。前文基本
将传感器和减震器排除。那么就剩下控制模块检测处理这一环节,也就是空气悬挂系统控制模块N51,位置如图3所示。
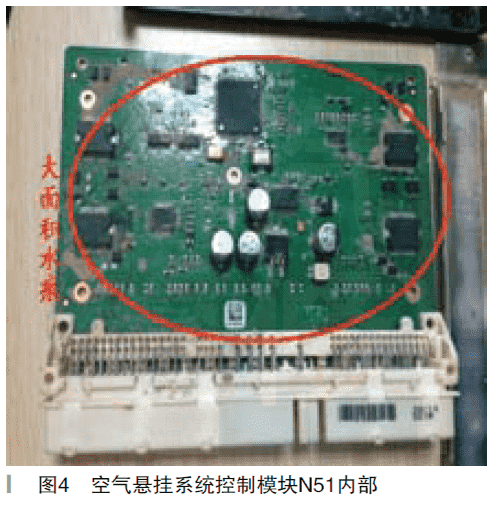
 通过拆卸检查发现,N5 1 内部因进水已产生铜绿色水锈,如图4所示。
通过拆卸检查发现,N5 1 内部因进水已产生铜绿色水锈,如图4所示。
 故障排除:更换空气悬挂系统控制模块N51,使用诊断仪执行控制模块自适应,标定车身高度且四轮定位。
故障排除:更换空气悬挂系统控制模块N51,使用诊断仪执行控制模块自适应,标定车身高度且四轮定位。
备注
一开始并没有想得太复杂, 没有故障码也没有伴随其他故障。只是当做一般定位来做。可是当发现不能解决问题时,开始逐一排除不可能的因素,最后得出肯定的答案。我们每一次作业都应细心并全面的思考,如果你掉以轻心可能会给你带来意想不到的大麻烦。认真反思,以后不管遇见什么样的问题都积极应对。不能看见是常见故障就麻痹大意。这样迟早会吃大亏,要时刻保持警惕心。这既能保护自己也利于公司。







