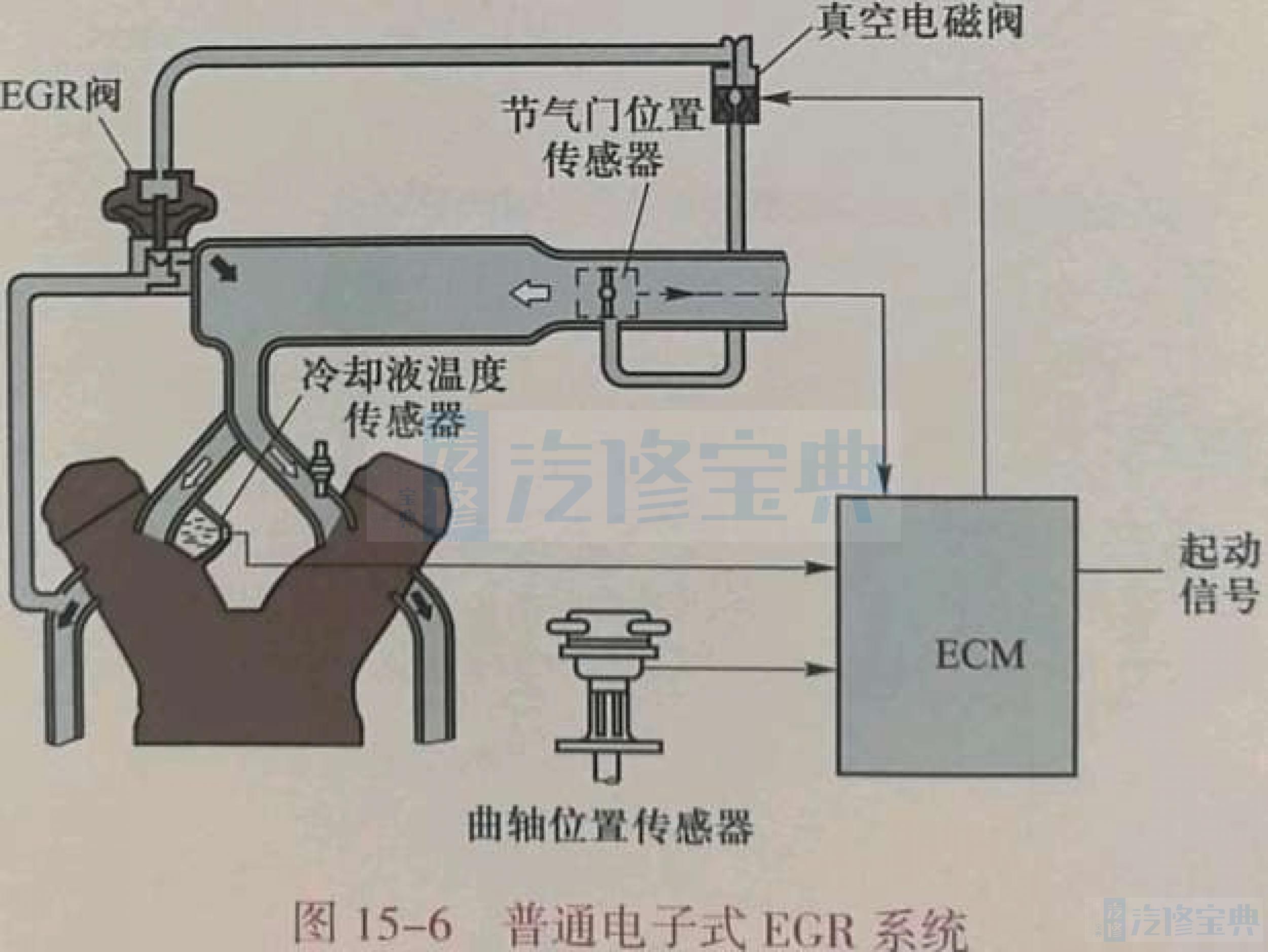
按照EGR阀控制方式的不同,ECR系统可分为普通电子式、可变比率式、压力反馈式、压差反馈式和位置反馈式等类型。 普通电子式: 普通电子式EGR通过控制一个或多个真空电磁阀来间接控制EGR阀的开启和关闭,如图15-6所示。当ECM打开EGR控制电磁阀时,真空进入EGR阀膜片室,在真空吸力的作用下,膜片推杆带动EGR阀门离开废气阀座,废气进入进气歧管。
可变比率式:
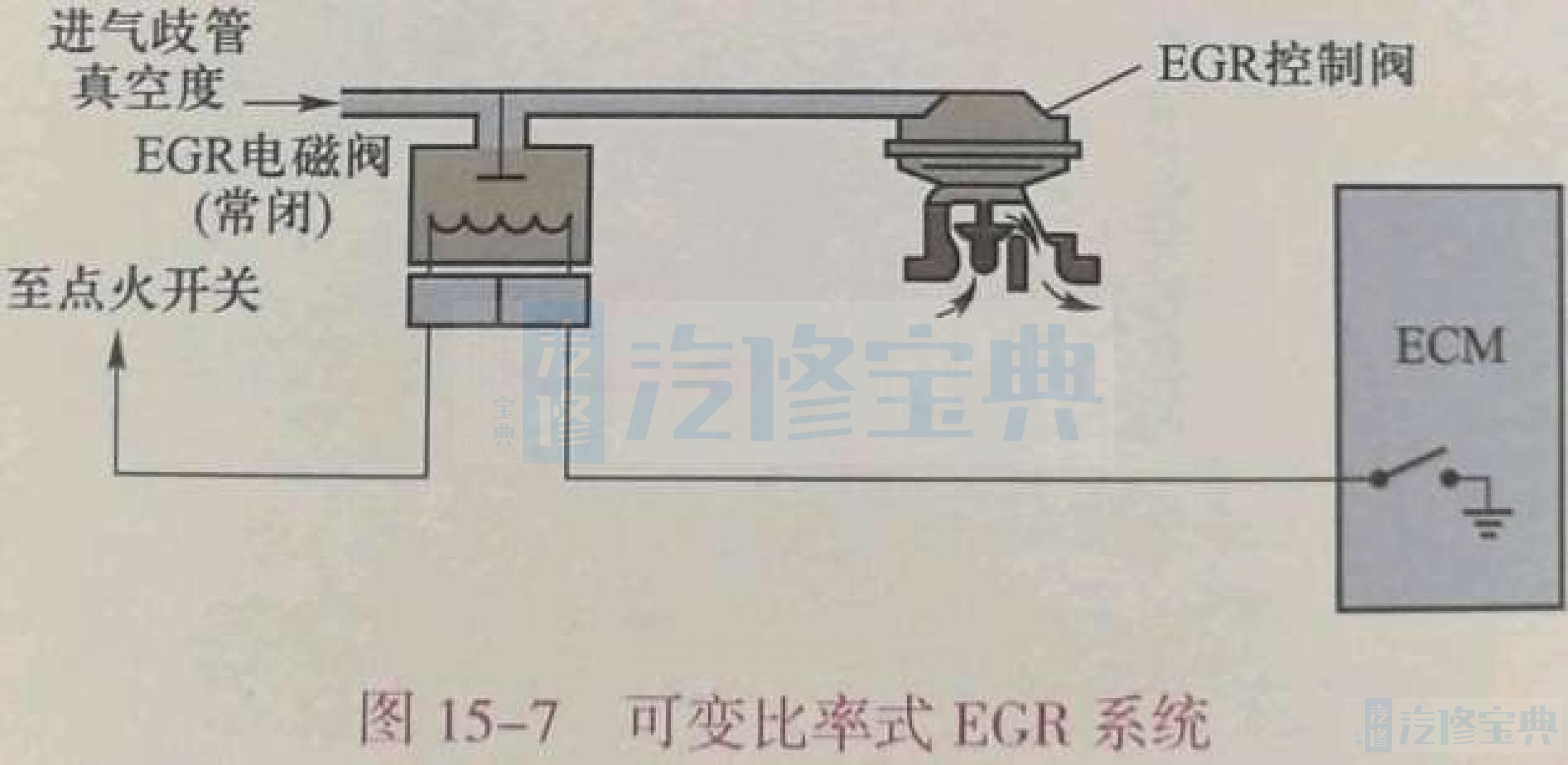
废气再循环比率是指进入发动机气缸空气总质量减去废气质量后与气缸内总气体质量的百分比。ECM根据发动机工况和负荷大小确定废气再循环比率,并通过改变EGR电磁阀控制信号的占空比来调节比率大小。当发动机工况和负荷发生变化时,ECM控制EGR电磁阀的占空比也随之变化,从而对废气流量进行精确控制,如图15-7所示。
压力反馈式:
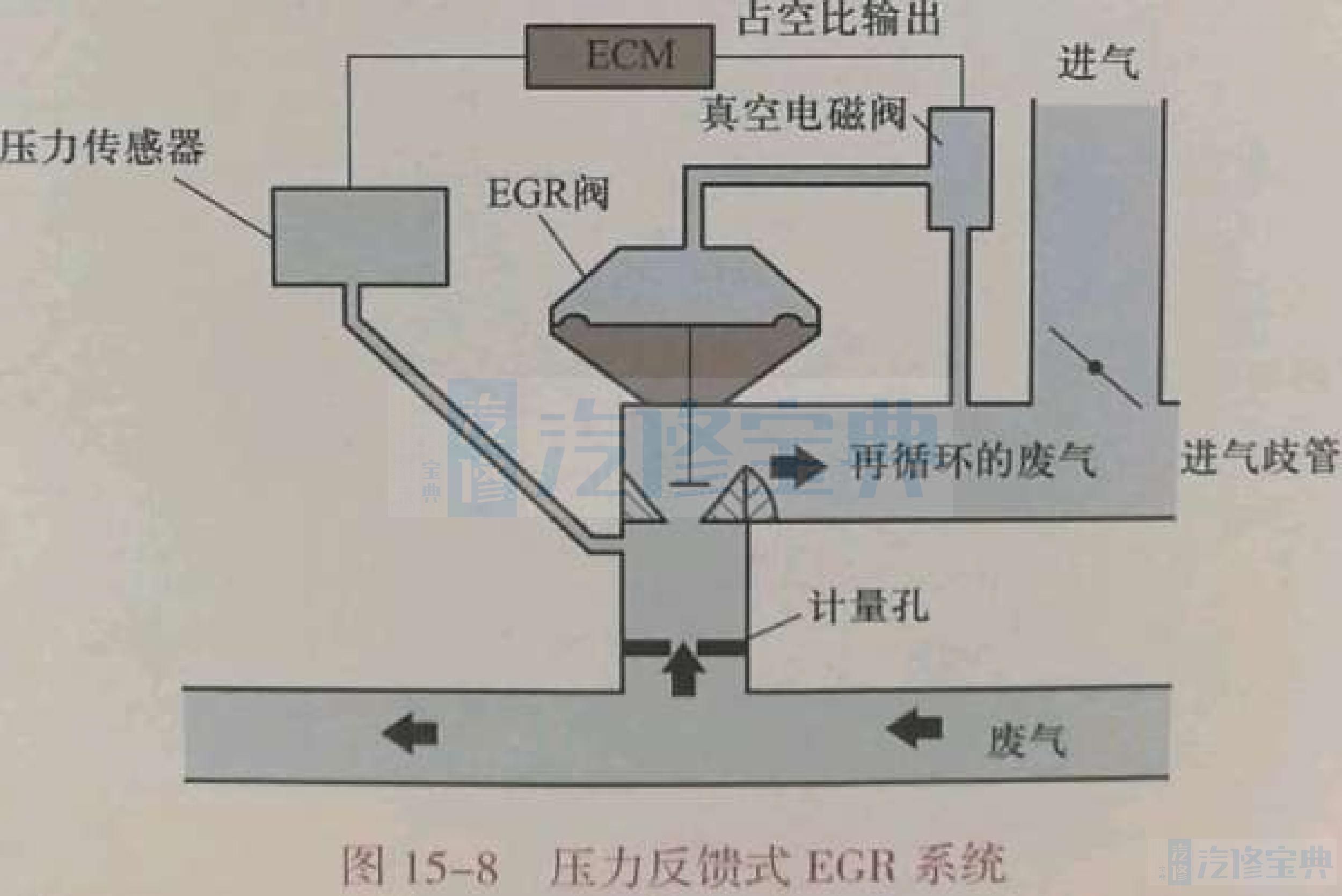
发动机运行时,ECM根据冷却液温度传感器、节气门位置传感器、发动机转速等信号确定目标废气循环流量,再根据压力传感器反馈的信号来计算实际废气循环流量,然后计算这两种流量的差值。ECM根据此差值通过调整EGR电磁阀的占空比来修正废气流量。其系统结构如图15-8所示。
压差反馈式:
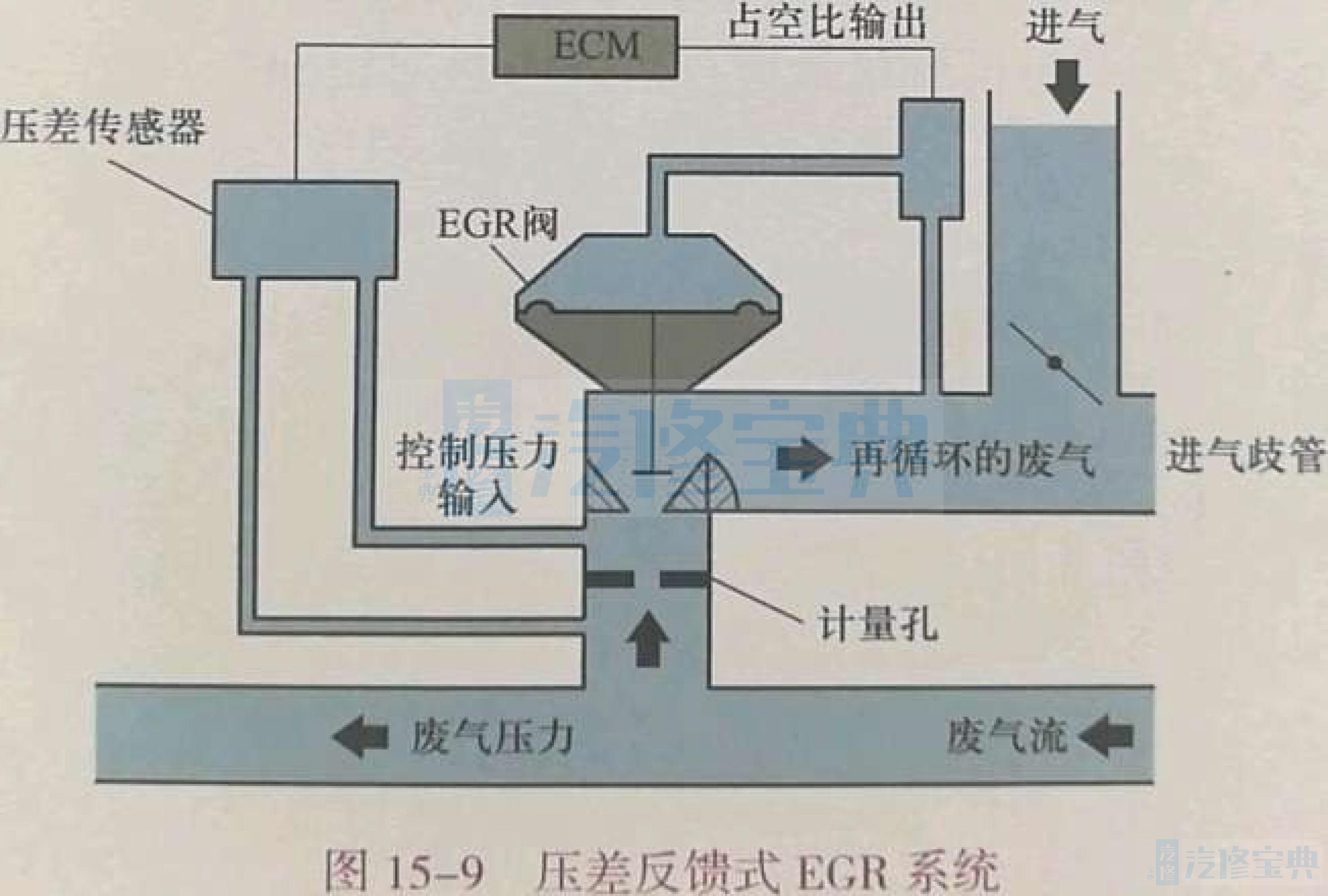
压差传感器有两个压力接口,分别检测来自排气歧管的废气压力和处于再循环状态的废气压力。ECM接收其反馈的压力差值,来确定目标废气循环流量。其系统控制如图15-9所示。
位置反馈式:
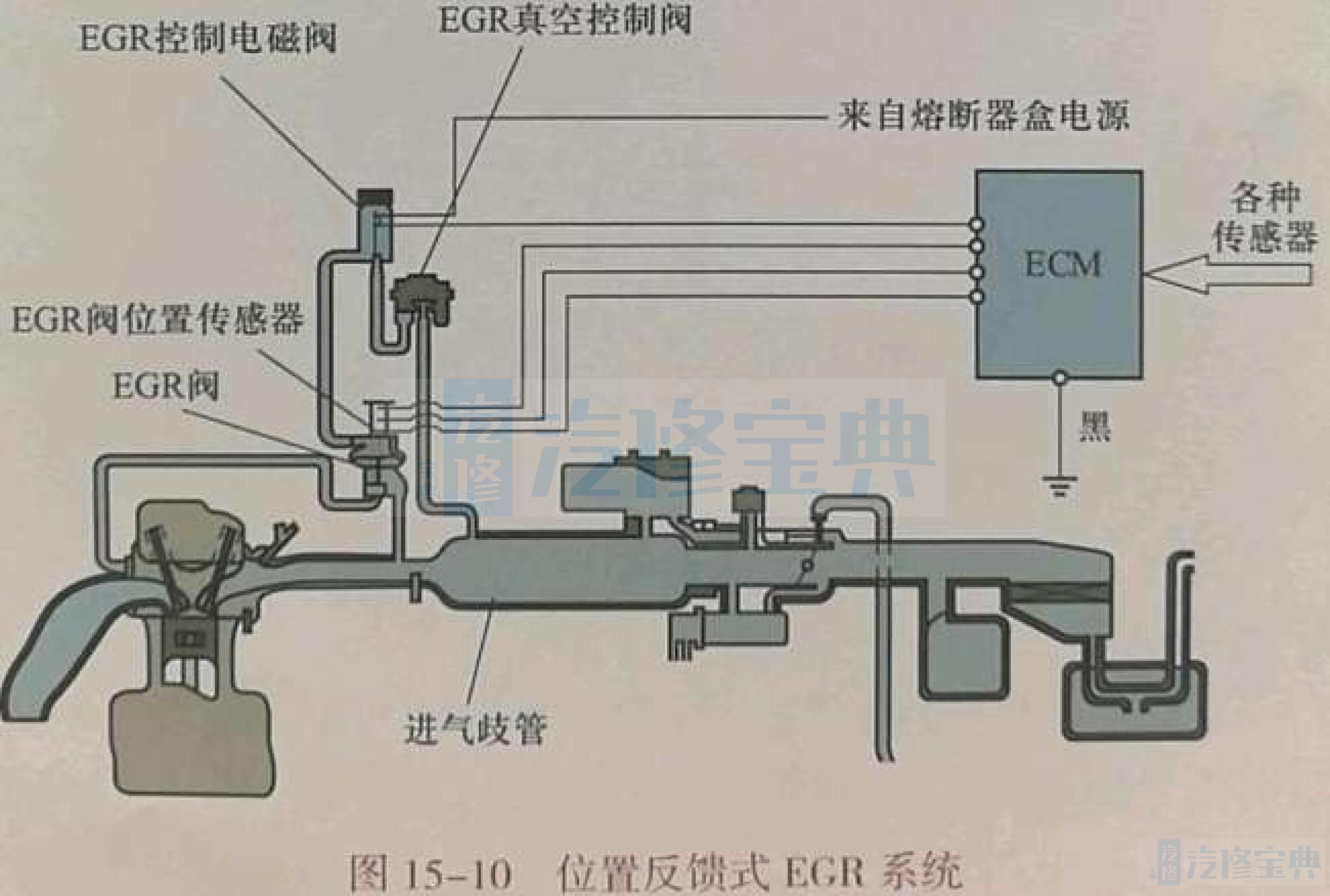
许多EGR系统使用位置传感器来监测EGR阀的运行状态。EGR阀位置传感器是一个电位计,位于EGR阀杆顶部,可以向ECM提供电压信号。当EGR阀针阀升程提高,废气流量增加时,EGR阀位置传感器向ECM反馈的信号电压随之变大;当EGR阀针阀升程降低,废气流量减少时,EGR阀位置传感器向ECM反馈的信号电压随之变小。ECM根据EGR阀位置传感器提供的信息,计算EGR系统的实际废气流量,然后与目标废气流量进行比较。
若有误差,ECM及时调整EGR电磁阀的占空比来修正此误差,大大提高了EGR的控制精度。
该系统工作如图15-10所示。