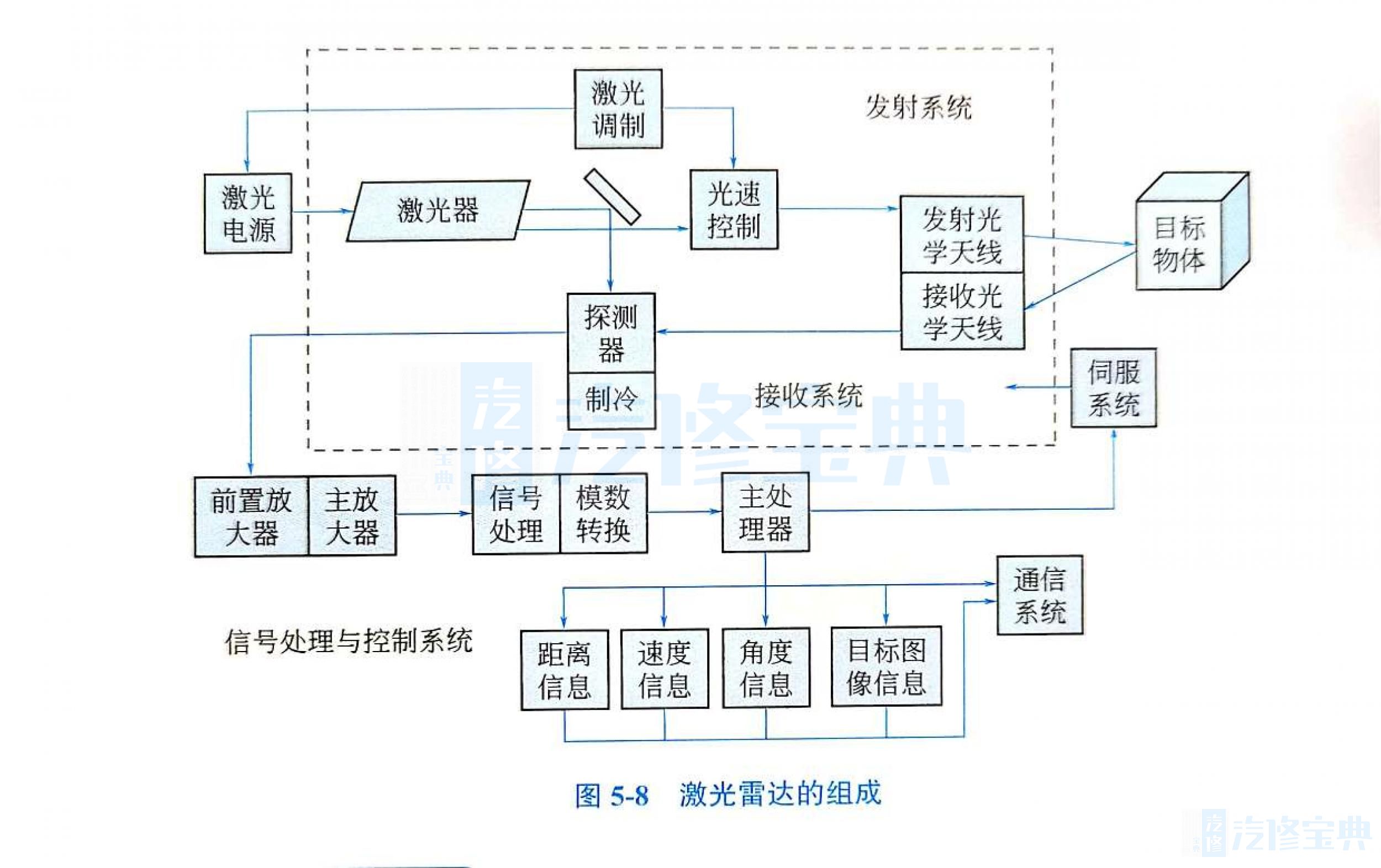
激光雷达是激光探测及测距系统的简称,是一种以激光器作为发射光源,采用光电探测技术手段的主动遥感设备。激光雷达是工作在光波频段的雷达,它利用光波频段的电磁波先向目标发射探测信号,然后将其接收到的同波信号与发射信号相比较,从而获得目标的位置(距离、方位和高度)、运动状态(速度、姿态)等信息,实现对目标的探测、跟踪和识别。 ⒈激光雷达的组成。 激光雷达主要由发射系统、接收系统以及信号处理与控制系统组成,如图5-8所示。发射系统主要负责向障碍物发出激光信号:接收系统主要负责接收经障碍物反射之后回来的激光信息;信号处理与控制系统主要负责将接收回来的信号进行处理,它是激光雷达系统最关键的环节,将直接影响激光雷达系统的测量精度激光雷达的硬件核心是激光器和探测器;软件的核心是信号的处理算法。不同类型的激光雷达,其组成是有一定差异的。
3.激光雷达的技术参数。
(1)最大探测距离最大探测距离通常需要标注基于某一个反射率下的测得值,例如白色反射体大概是70%反射率,黑色物体是7%~20%反射率。
(2)距离分辨率距离分辨率是指两个目标物体可区分的最小距离。
(3)测距精度测距精度是指对同一目标进行重复测量得到的距离值之间的误差范围。
(4)测量帧频测量帧频与摄像头的帧频概念相同,激光雷达成像刷新帧频会影响激光雷达的响应速度,刷新率越高,响应速度越快。
(5)数据采样率数据采样率是指每秒输出的数据点数,等于帧率乘以单幅图像的点云数目,通常数据采样率会影响成像的分辨率,特别是在远距离,点云越密集,目标呈现就越精细。
(6)视场角视场角又分为垂直视场角和水平视场角,是激光雷达的成像范围。
(7)角度分辨率角度分辨率是指扫描的角度分辨率,等于视场角除以该方向所采集的点云数目,因此本参数与数据采样率直接相关。
(8)波长激光雷达所采用的激光波长,波长会影响雷达的环境适应性和对人眼的安全性。
⒋激光雷达的特点。
激光雷达具有以下优点:
①分辨率高。激光雷达可以获得极高的角度、距离和速度分辨率。通常激光雷达的角分辨率不低于0.1mard,也就是说可以分辨3km距离上相距0.3m的两个
目标,并可同时跟踪多个目标;距离分辨率可达0m:速度分辨率能达到10m/s②探测范围广。探测距离可达300m以上。
③信息量丰富。可直接获取探测目标的距离、角度、反射强度、速度等信息,生成目标多维度图像。
④可全天候工作。激光主动探测,不依赖于外界光照条件或目标本身的辐射特性,它只需发射自己的激光束,通过探测发射激光束的回波信号来获取目标信息。
激光雷达具有以下缺点:
①与毫米波雷达相比,产品体积大,成本高。
②不易识别交通标志和交通信号灯激光雷达的产品类型及应用激光雷达按有无机械旋转部件,可分为机械激光雷达、固态激光雷达和混合固态激光雷达。
(1)机械激光雷达机械激光雷达带有控制激光发射角度的旋转部件,体积较大,价格昂贵,测量精度相对较高,一般置于汽车顶部。
(2)固态激光雷达固态激光雷达则依靠电子部件来控制激光发射角度,无须机械旋转部件,故尺寸较小,可安装于车体内。
(3)混合固态激光雷达混合固态激光雷达没有大体积旋转结构,采用固定激光光源,通过内部玻璃片旋转的方式改变激光光束方向,实现多角度检测的需要,并且采用嵌入式安装根据线束数量的多少,激光雷达又可分为单线束激光雷达与多线束激光雷达。
(1)单线束激光雷达单线束激光雷达扫描一次只产生一条扫描线,其所获得的数据为2D数据,因此无法区别有关目标物体的3D信息。不过,由于单线束激光雷达具有测量速度快、数据处理量少等特点,多被应用于安全防护、地形测绘等领域。
(2)多线束激光雷达多线束激光雷达扫描一次可产生多条扫描线,目前市场上多线束激光雷达产品包括4线束、8线束、16线束、32线束、64线束、128线束等,其细分可分为25D激光雷达及3D激光雷达。2.5D激光雷达与3D激光雷达最大的区别在于激光雷达垂直视野的范围,前者垂直视野范围一般不超过10°,而后者可达到30°甚至40°以上,这也就导致两者对于激光雷达在汽车上的安装位置要求有所不同少线束激光雷达主要用于智能网联汽车ADAS,奥迪A8L安装的4线束激光雷达如图5-10所示,可实现自适应巡航控制系统、车道偏离预警系统、自动紧急
5.激光雷达的产品类型及应用。
激光雷达按有无机械旋转部件,可分为机械激光雷达、固态激光雷达和混合固态激光雷达。
(1)机械激光雷达机械激光雷达带有控制激光发射角度的旋转部件,体积较大,价格昂贵,测量精度相对较高,一般置于汽车顶部。
(2)固态激光雷达固态激光雷达则依靠电子部件来控制激光发射角度,无须机械旋转部件,故尺寸较小,可安装于车体内。
(3)混合固态激光雷达混合固态激光雷达没有大体积旋转结构,采用固定激光光源,通过内部玻璃片旋转的方式改变激光光束方向,实现多角度检测的需要,并且采用嵌入式安装。
根据线束数量的多少,激光雷达又可分为单线束激光雷达与多线束激光雷达(1)单线束激光雷达单线束激光雷达扫描一次只产生一条扫描线,其所获得的数据为2D数据,因此无法区别有关目标物体的3D信息。不过,由于单线束激光雷达具有测量速度快、数据处理量少等特点,多被应用于安全防护、地形测等领域。
(2)多线束激光雷达多线束激光雷达扫描一次可产生多条扫描线,目前市场上多线束激光雷达产品包括4线束、8线束、16线束、32线束、64线束、128线束等,其细分可分为2.5D激光雷达及3D激光雷达。2.5D激光雷达与3D激光雷达最大的区别在于激光雷达垂直视野的范围,前者垂直视野范围一般不超过10°,而后者可达到30°甚至40°以上,这也就导致两者对于激光雷达在汽车上的安装位置要求有所不同。
少线束激光雷达主要用于智能网联汽车ADAS,奥迪A8L安装的4线束激光雷达如图5-10所示,可实现自适应巡航控制系统、车道偏离预警系统、自动紧急制动系统、交通拥堵辅助系统。
多线束激光雷达具有高精度电子地图定位、障碍物识别、可通行空间检测障碍物轨迹预测等功能L4级和L5级的智能网联汽车必须使用多线束激光雷达,360°发射激光,从而达到360°扫描,获取车辆周围行驶区域的三维点云,通过比较连续感知的点云、物体的差异检测其运动,由此创建一定范围内的3D地图,如图5-11所示。
无人驾驶汽车的精准定位和路径跟踪必须依靠激光雷达和高精度地图等,如图5-12所示。