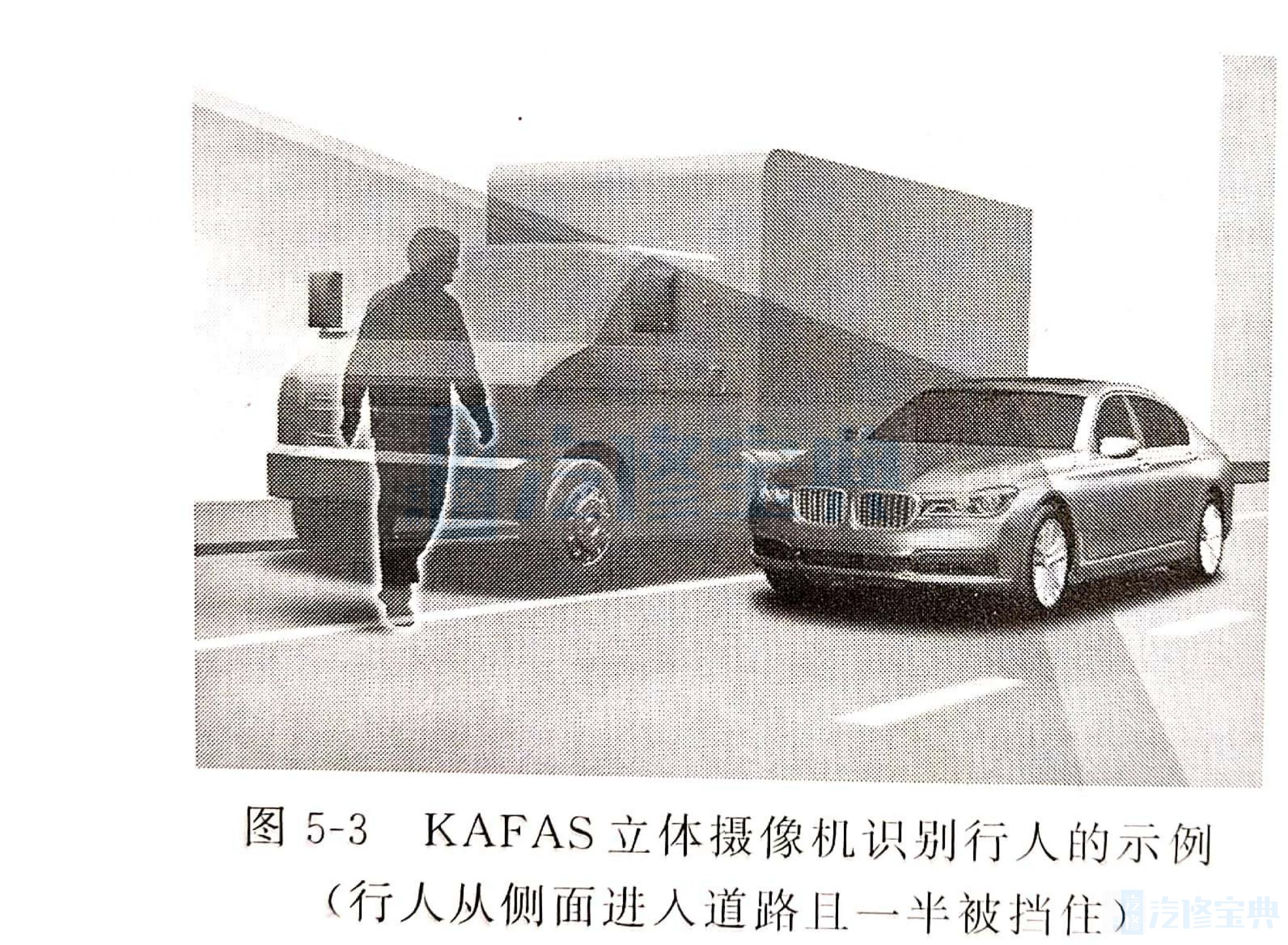
1.目标识别: KAFAS立体摄像机探测车辆前方情况并通过图像处理识别出探测区域内移动和静止车辆的完整尾部,同时 KAFAS立体摄像机负责确定车道信息、车辆位置和车辆移动情况。 通过 KAFAS立体摄像机的图像数据可将目标准确识别为车辆并将其横向运动识别为变更车道,此外还可通过 KAFAS立体摄像机识别出行人和骑车人(图5-3)即使在不利条件下,例如出现如图5-3示例中这样光线条件较差、背景对比不鲜明或多个目标连续紧密的情况,两个独立的光学路径也具有显著优势。通过立体摄像机的冗余式图像探测,仅通过一次拍摄便可准确识别出障碍物并确定其尺寸。
2.交通标志识别:
KAFAS立体摄像机还负责识别限速交通标志,在宝马新7系上也可实现禁止超车和取 消禁止超车识别。
3.车道识别:
如图5-4所示,安装在车内后视镜底座内的 KAFAS立体摄像机监控车辆前方区域,对车辆前方最远约40m、车辆左右两侧最远约5m范围内的车道进行拍摄。之后通过集成在KAFAS立体摄像机内的 KAFAS控制单元分析图像数据,通过图像处理,控制单元在KAFAS立体摄像机拍摄的图像中搜索道路标线根据所在国家、道路类型或当前环境条件,图像中的道路标线可能会存在很大差异。系统能够识别出各种道路标线和标线类型,可分析的道路标线必须首先能够通过 KAFAS立体摄像机和 KAFAS控制单元进行识别,可分析的行驶车道平均宽度必须超过2.5m。
减振器控制系统EDC等的不同调节参数以及与双车桥空气悬架协调配合,根据路面状况对底盘设置进行相应调节在15~100km/h车速下可主动地、更加舒适地克服障碍物困难,这样可使车身垂直运动较少,因为车辆“伴随道路”行驶,驾驶员不会明显感觉到路面不平。