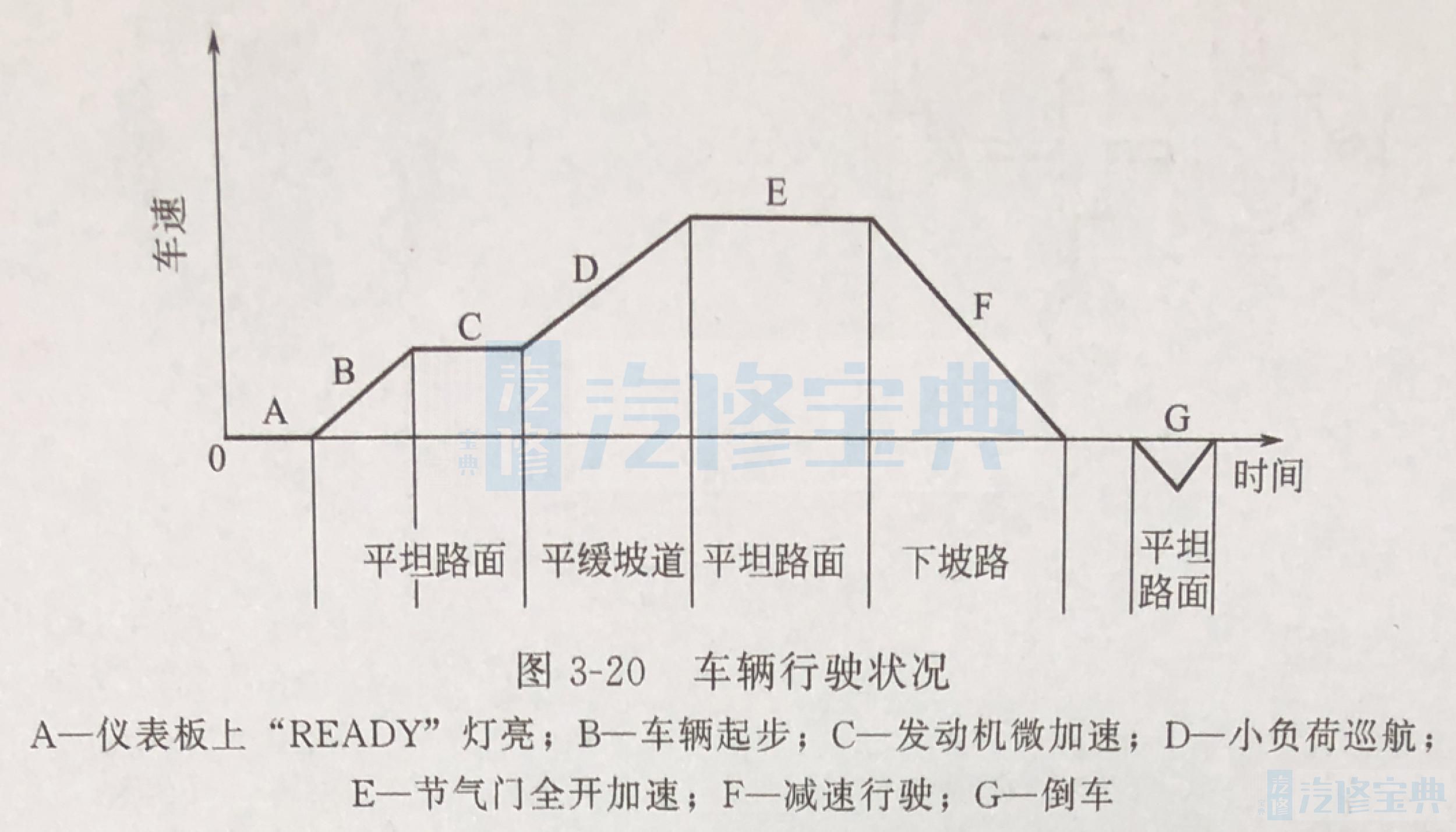
图3-20反映了车辆的常见行驶状况。可以按照图3-20来分析THS-Ⅱ系统是如何控制发动机、MG1和MG2来驱动汽车的。
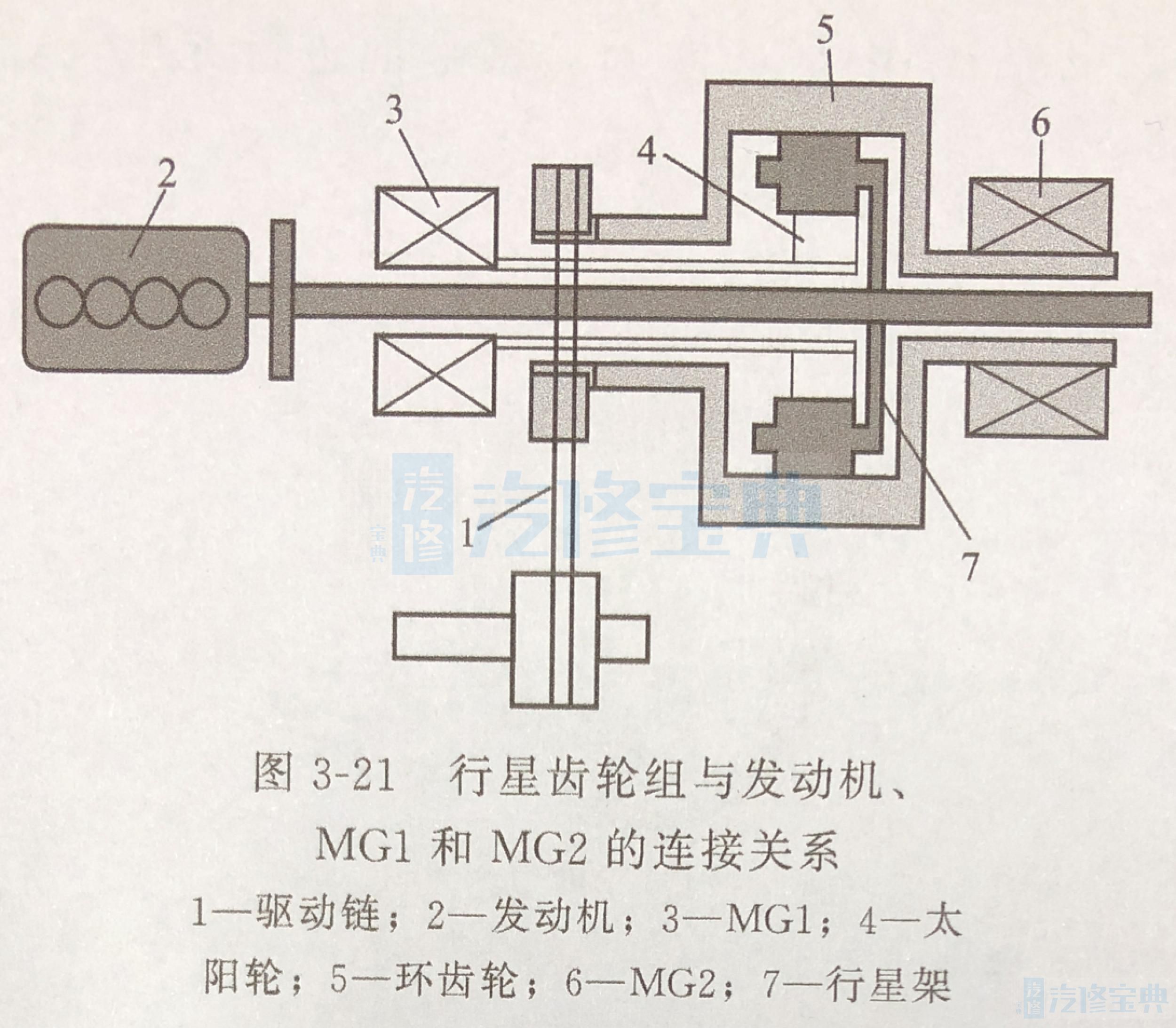
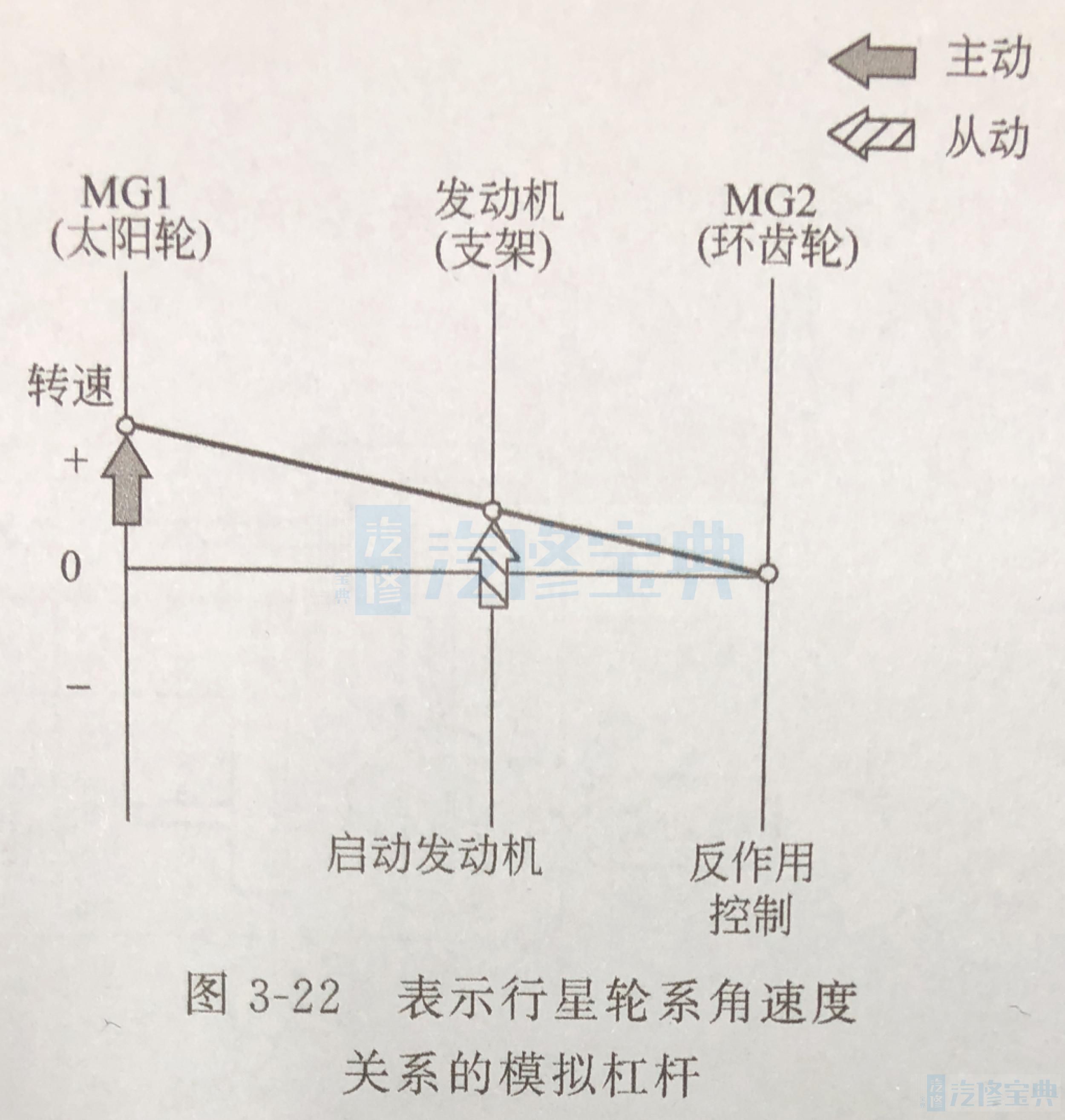
图3-21所示为行星齿轮组与发动机、MG1和MG2的连接关系。发动机连接行星架MG1连接太阳轮,MG2连接环齿轮。根据相对运动关系可以用模拟杠杆清楚地表示出行星齿轮机构(组)各部件的转速关系(图3-22)。杠杆的3个节点的相对位置由太阳轮(MG1)和环齿轮(MG2)的齿数确定,相对于水平基准位置,同侧代表运转方向相同,异侧代表运转方向相反,相对于基准位置的高度(垂直位移)相似于转速。
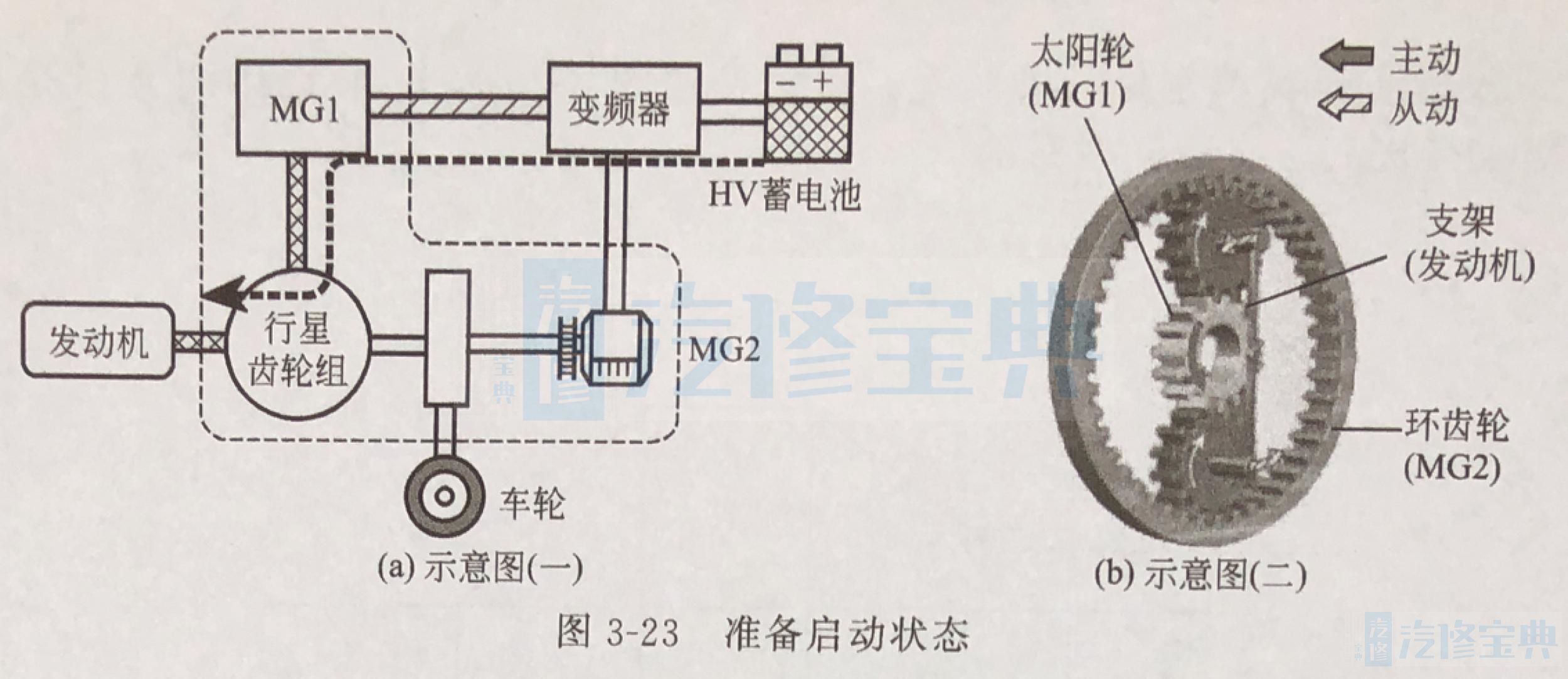
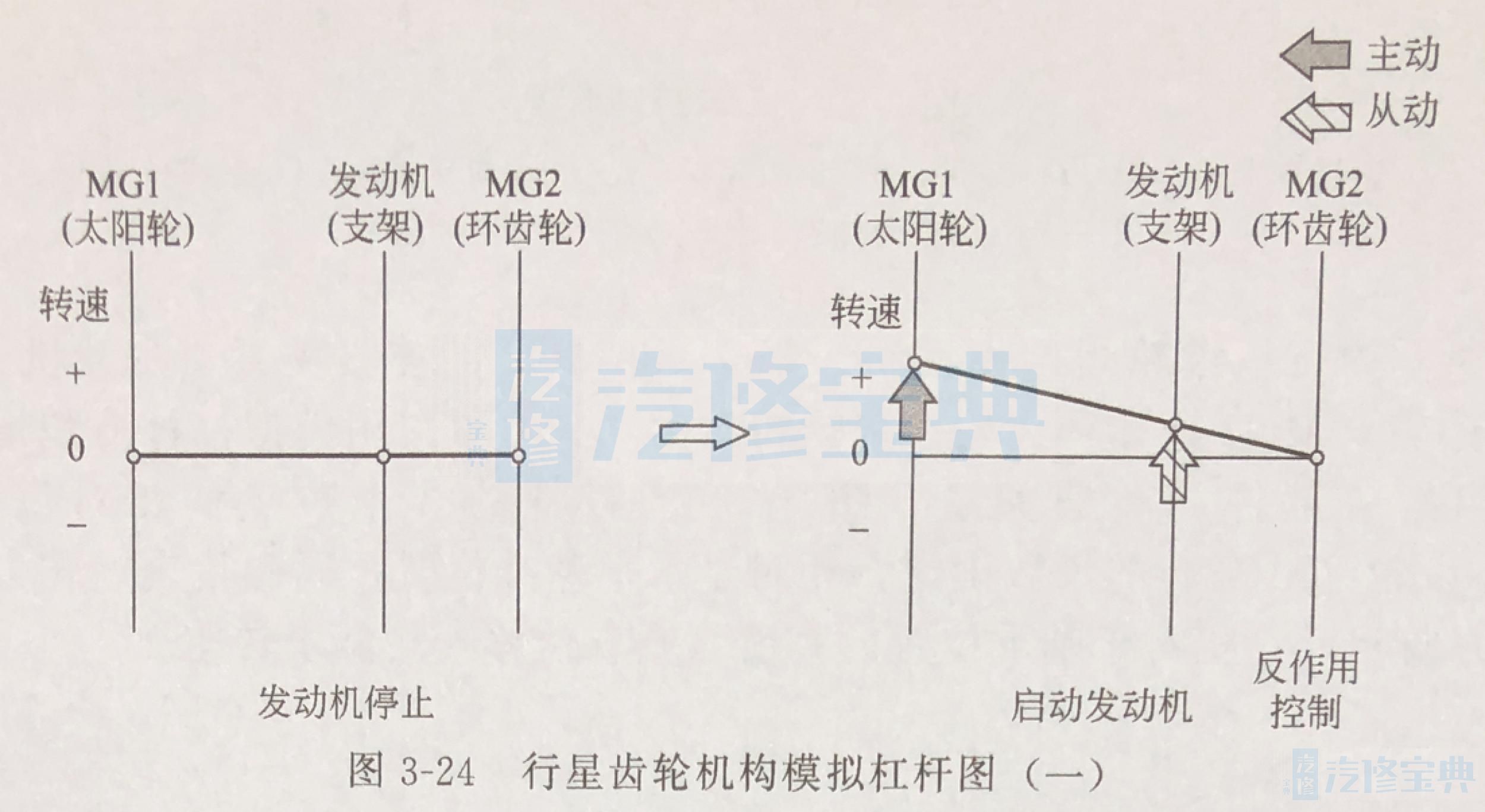
(1)准备启动状态(图3-20中的A阶段)若水温、S(C、蓄电池温度和电载荷状态不满足条件,即使驾驶员按下“ POWER”开关,“ READY”指示灯打开,发动机也不会转动启动发动机:仪表盘上的“ READY”指示灯亮、4辆处于“P”或者倒挡时,若HVECU监视的任何项目都正常, HV ECU启动发电机(MG1),从而启动发动机。
运行期间,为避免发电机(MG1)太阳轮的反作用力转动电动机(MG2)的环齿轮并驱动车轮,电动机(MG2)接收电流,施加制动(图3-23、图3-24),这个功能称为“反作用控制”。
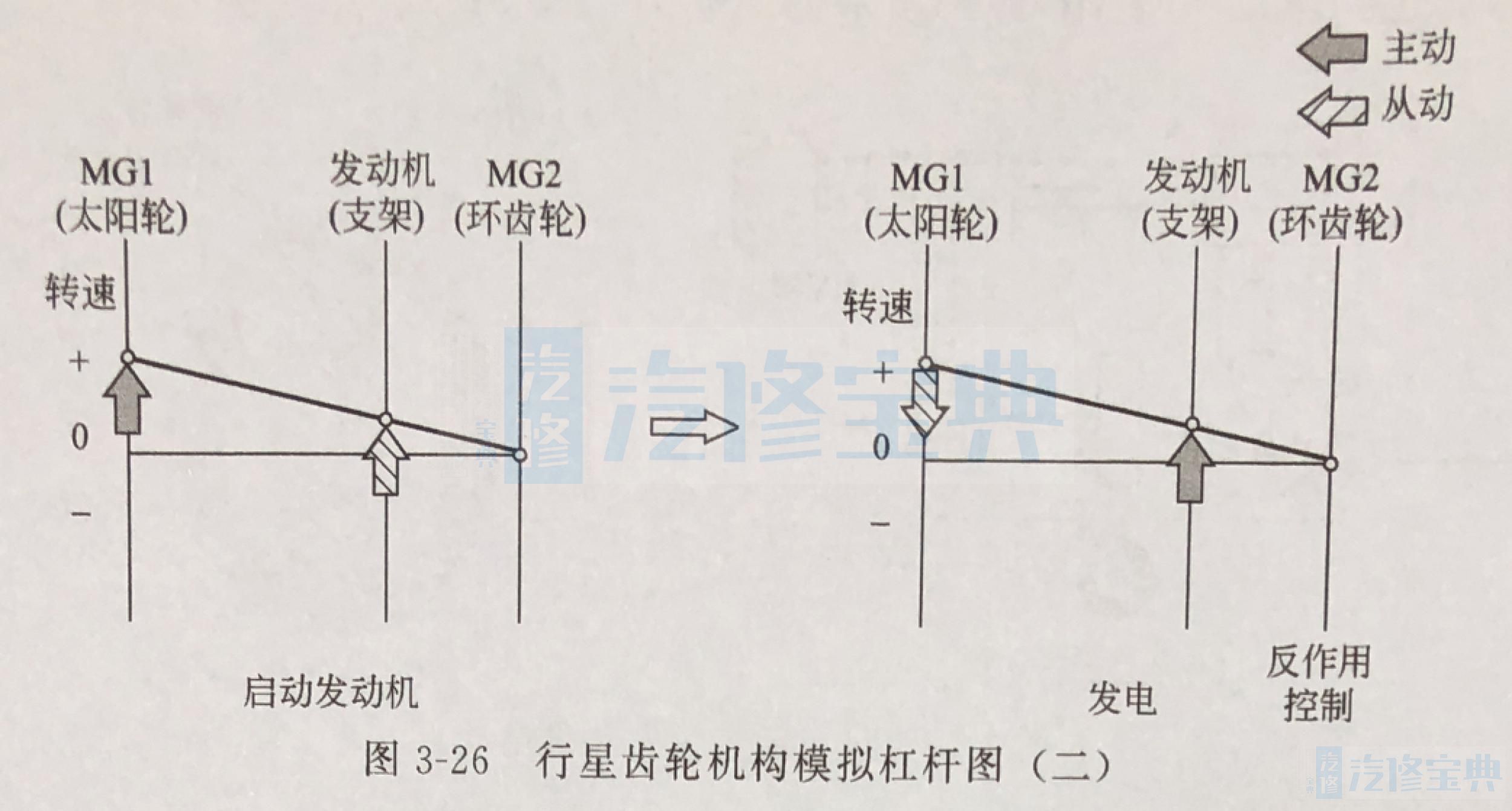
在随后的状态中,运转中的发动机驱动发电机(MG1),为HV蓄电池进行充电,如图3-25、图3-26所示。
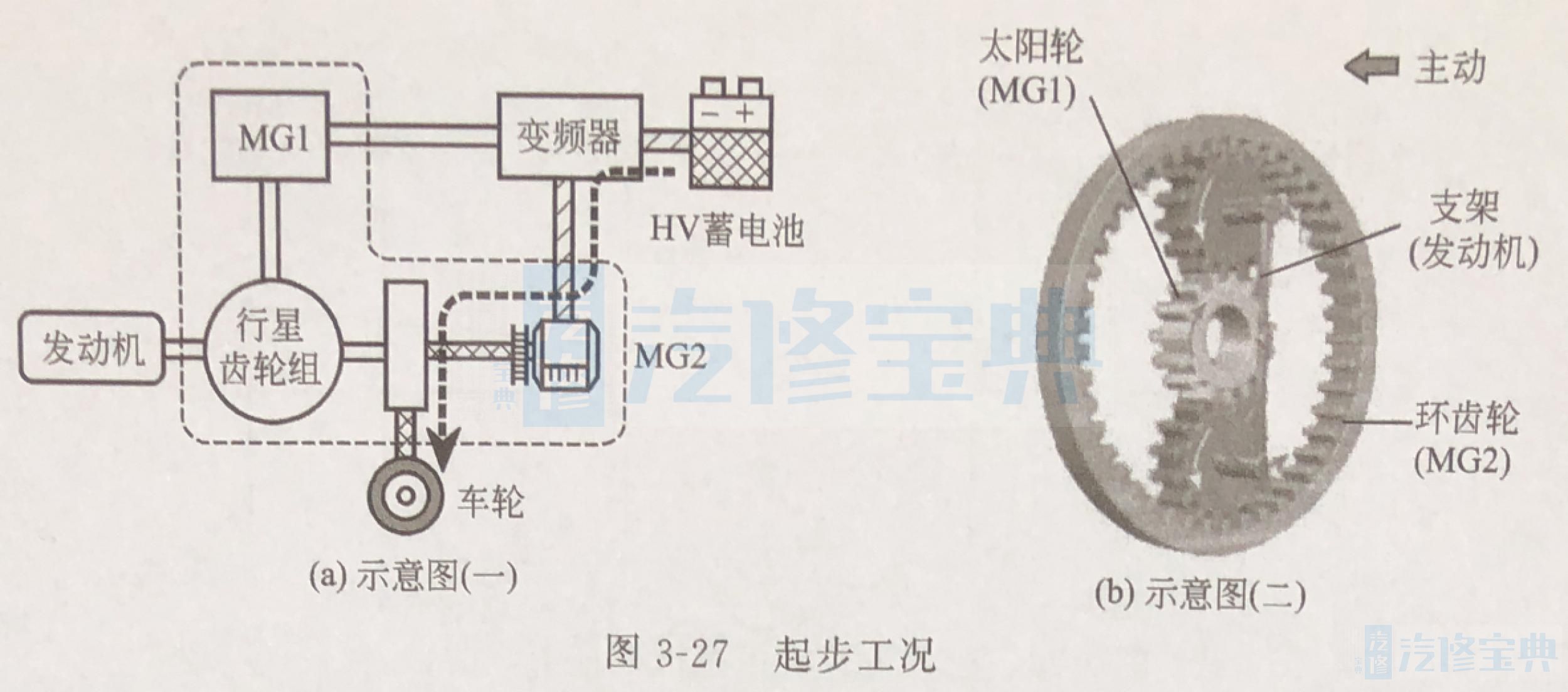
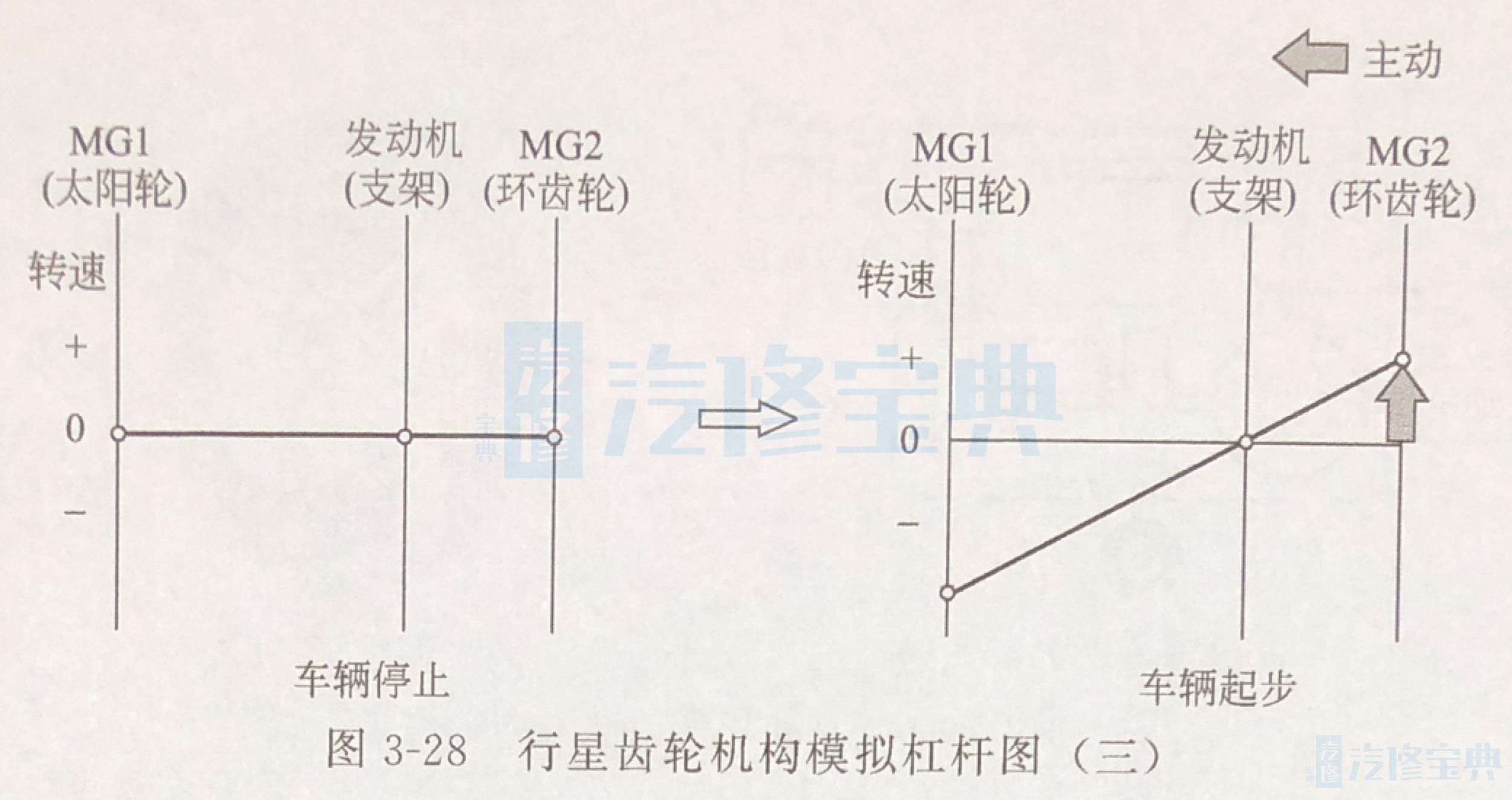
(2)起步工况(图3-20中的B阶段) 电动机(MG2)驱动车辆起步后,车辆只由电动机(M(2)驱动。此时,发动机保持停止状态,发电机(MG1)以反方向旋转而不发电(图3-27、图3-28)。
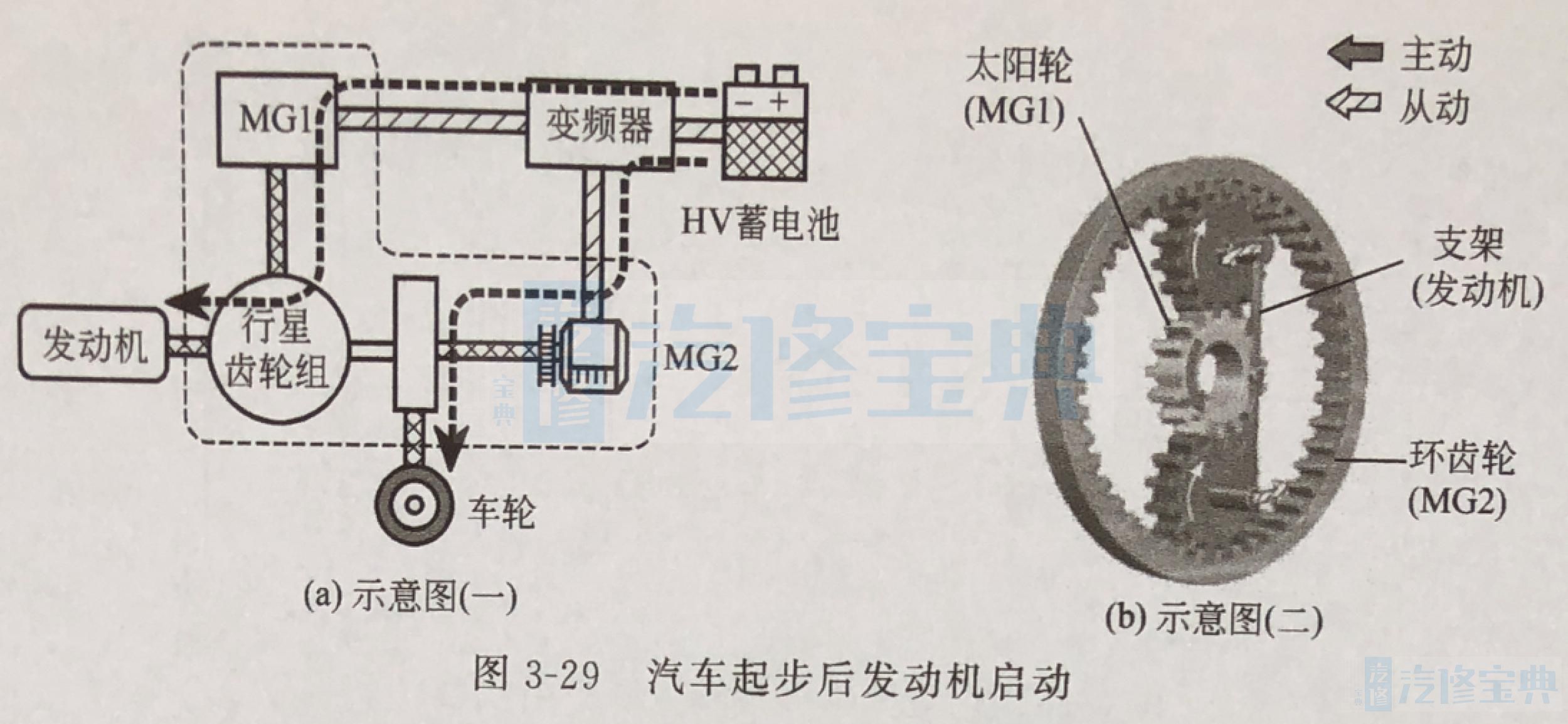
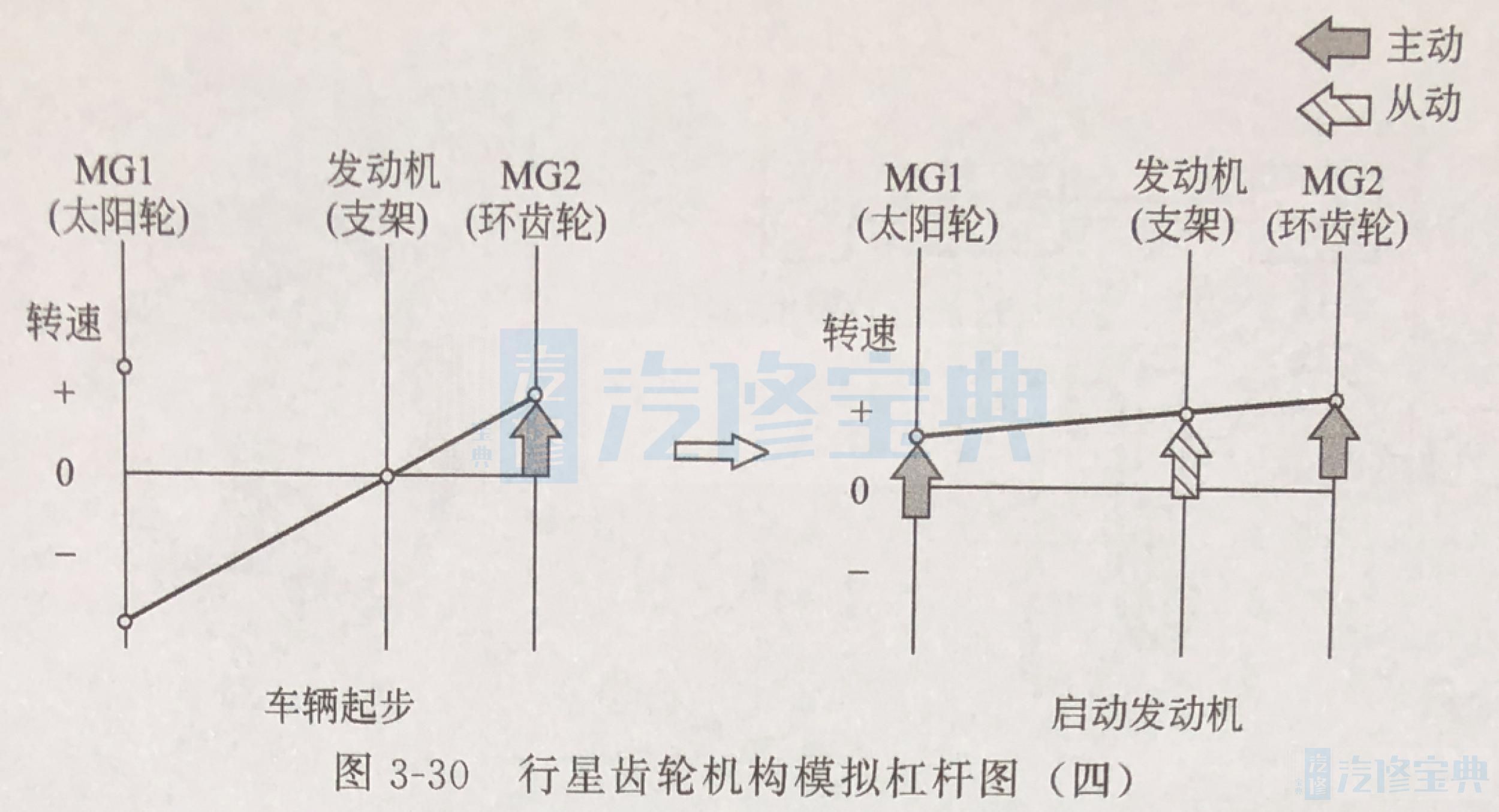
启动发动机:只有电动机(MG2)工作时,增加所需驱动转矩,发电机(MG1)才能被启动,进而启动发动机;同样,若 HV ECU监视的任何项目如SOC、蓄电池温度、水温和电载荷状态与规定值有偏差,发电机(MG1)将被启动,进而启动发动机(图3-29、图3-30)。
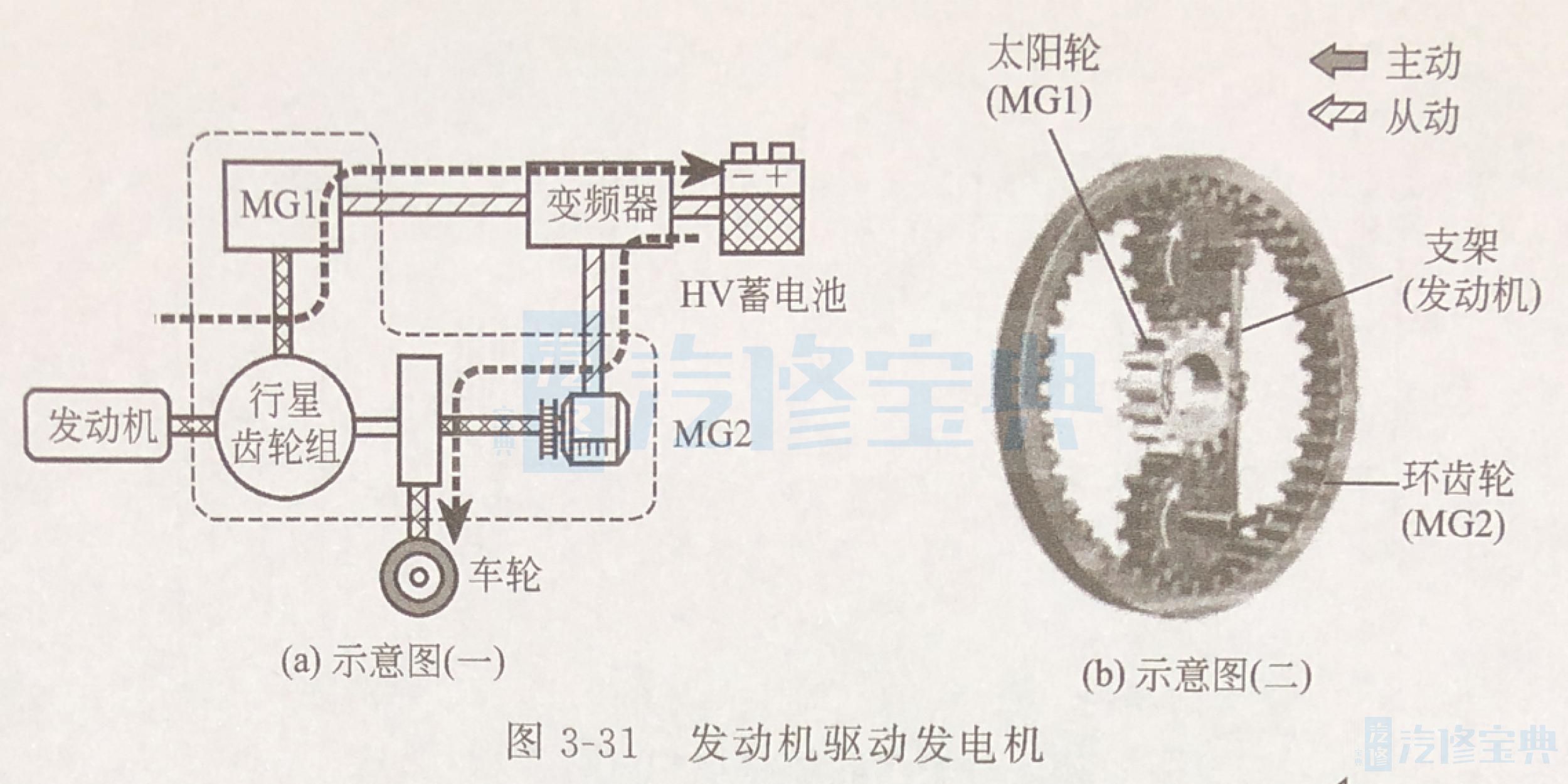
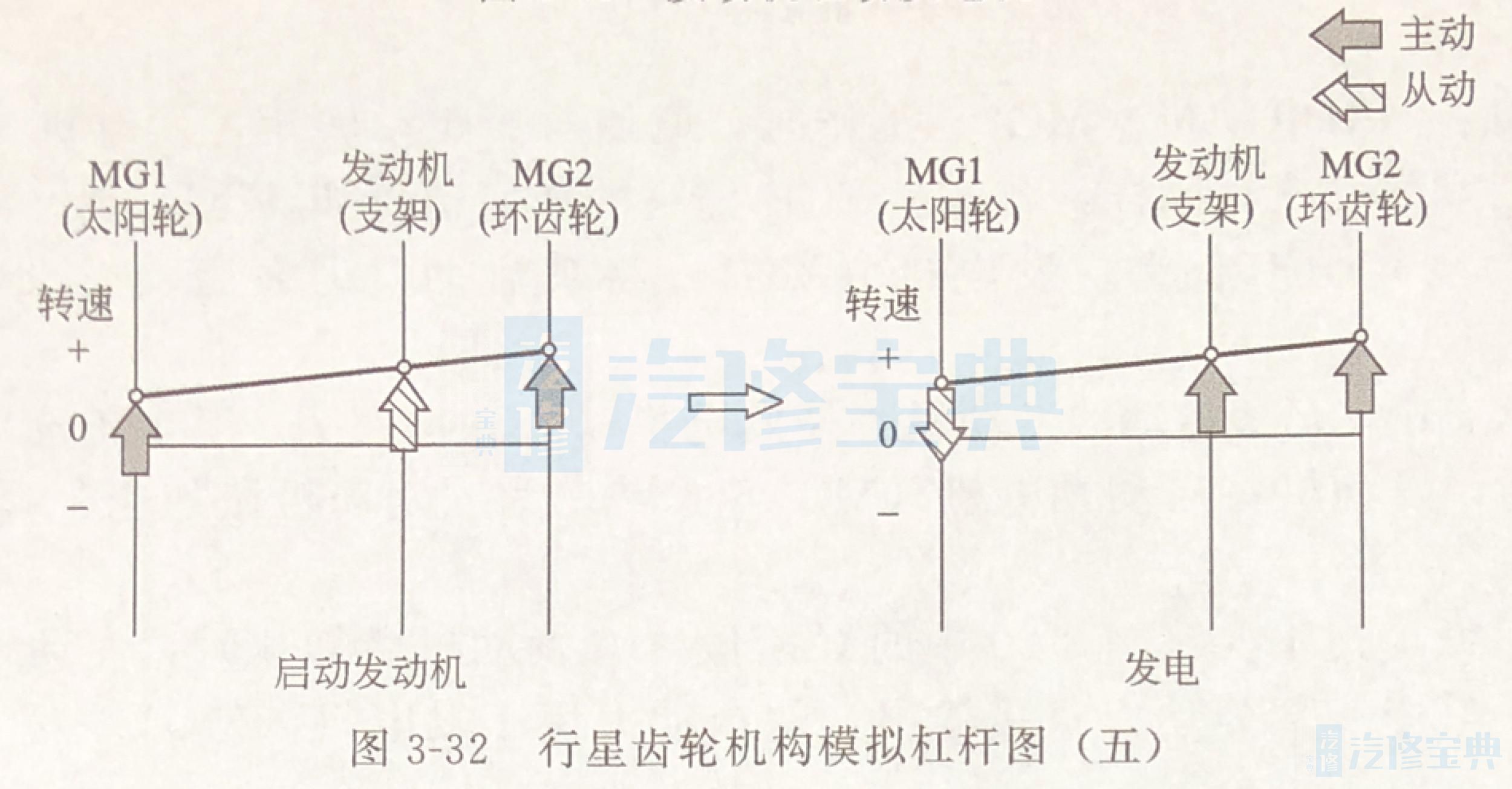
在随后的状态中,已经启动的发动机将使发电机(MG1)为HV蓄电池充电。若需要增加所需驱动转矩,发动机将启动发电机(MG1)并转变为“发动机微加速”模式(图3-31、图3-32)。
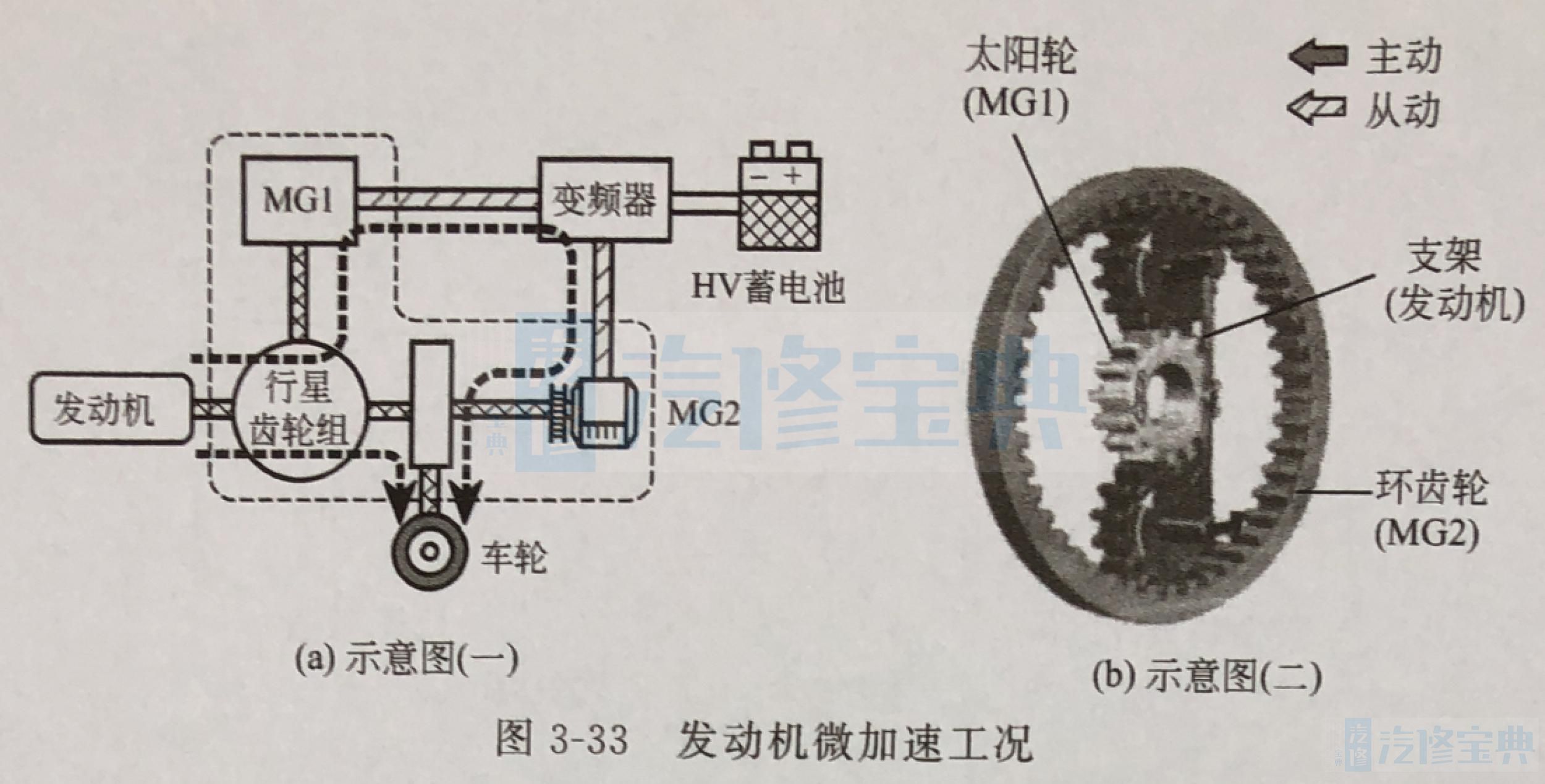
)发动机微加速况(图3-20中的(阶段)发动机微加速时,发动机的动力由行星齿轮组分配。其中一部分动力直接输出.剩余动力用于发电机(MG1)发电,通过变频器输出,电力输送到电动机(MG2),用来输出动力(图3-33、图3-34)。
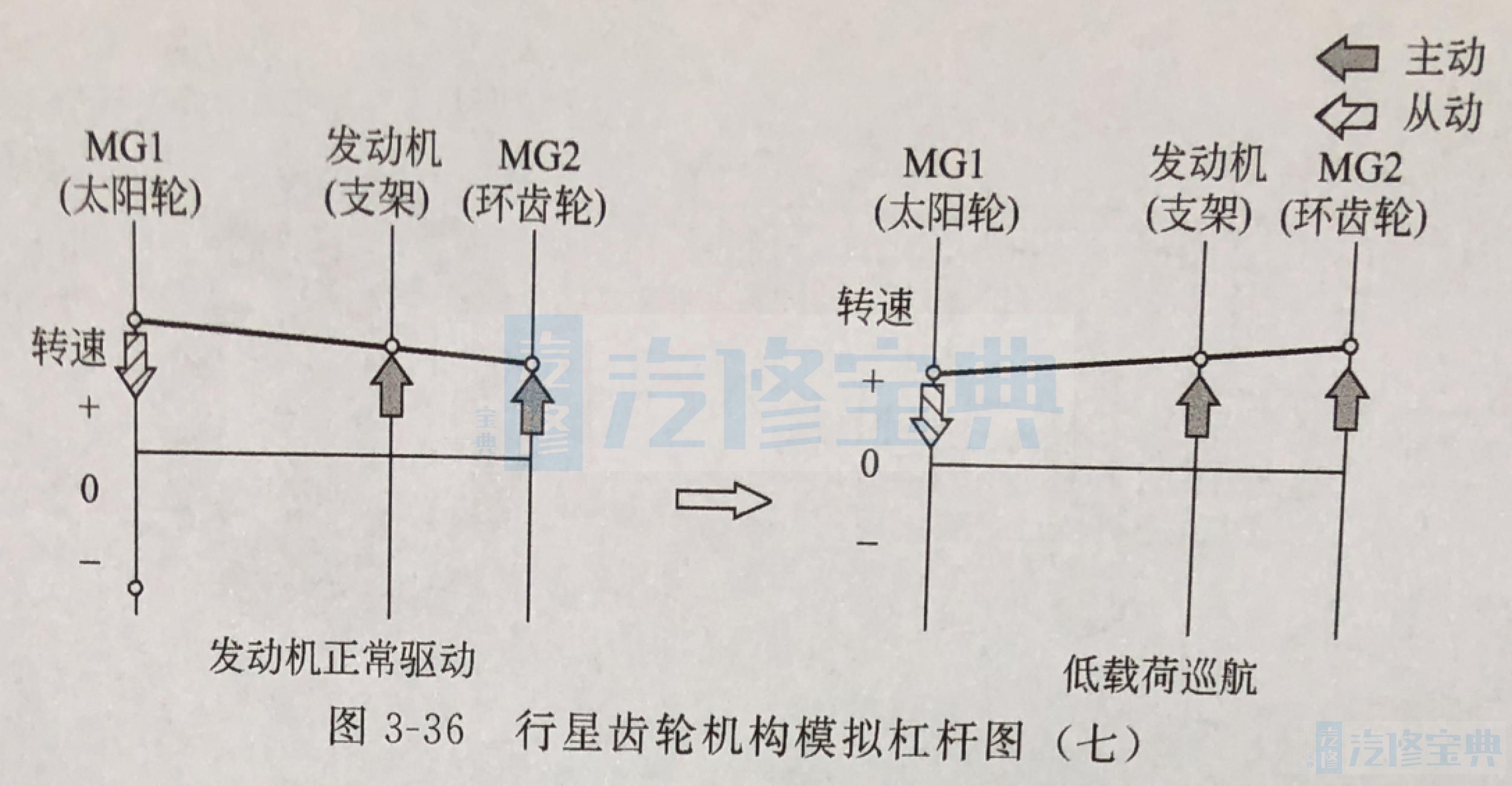
(4)低载荷巡航工况(图3-20中的D阶段)车辆以低载荷巡航时,发动机的动力由行星齿轮分配。其中一部分动力直接输出,剩余动力用于发电机(MG1)发电,通过变频器传输,电力输送到电动机(MG2),用来输出动力(图3-35、图3-36)。
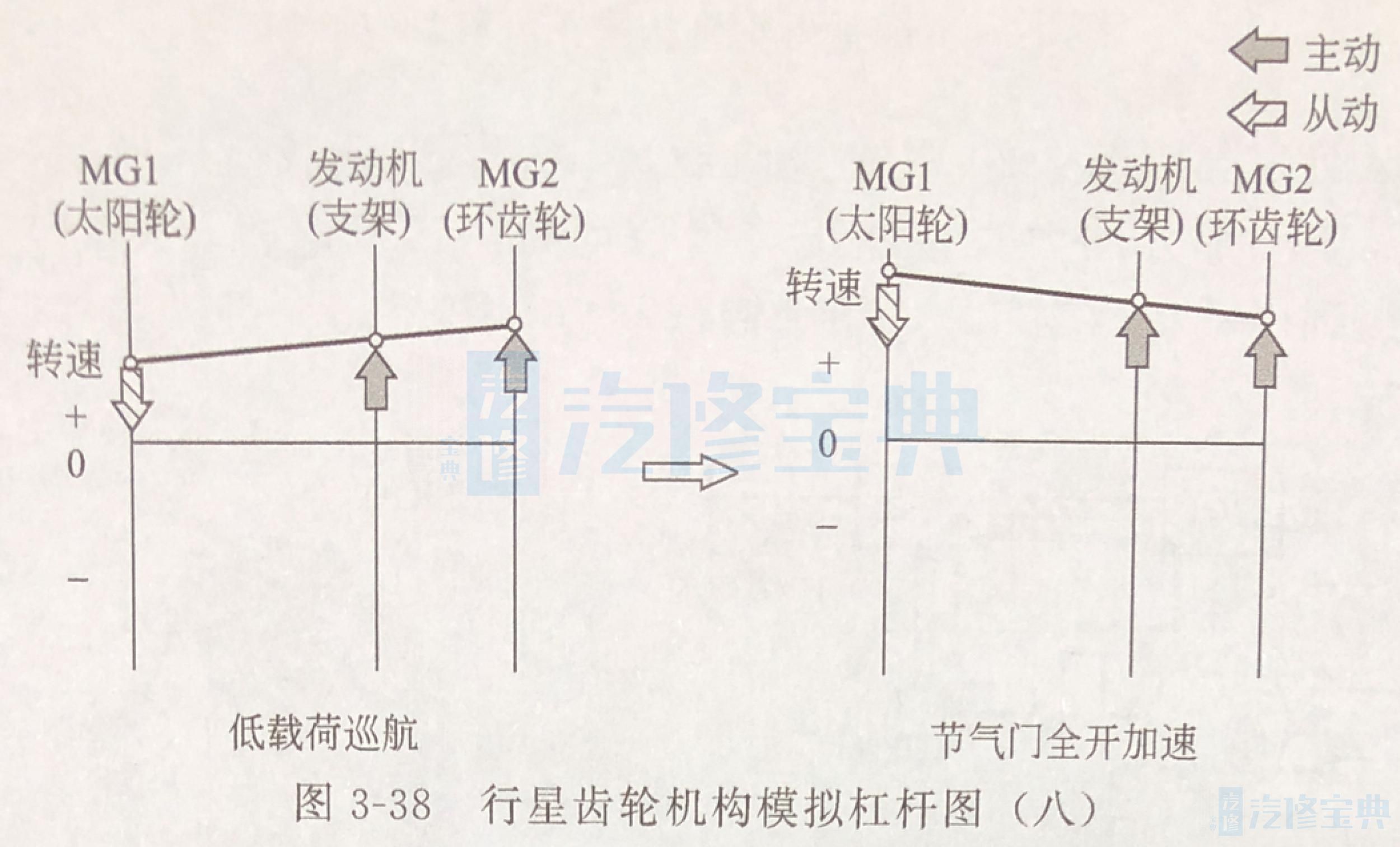
(5)节气门全开加速工况(图3-20中的E阶段)车辆从低载荷巡航转换为节气门全开加速模式时,系统将在确保电动机(MG2)动力的基础上,增加HV蓄电池的电动力(图3-37、图3-38)。
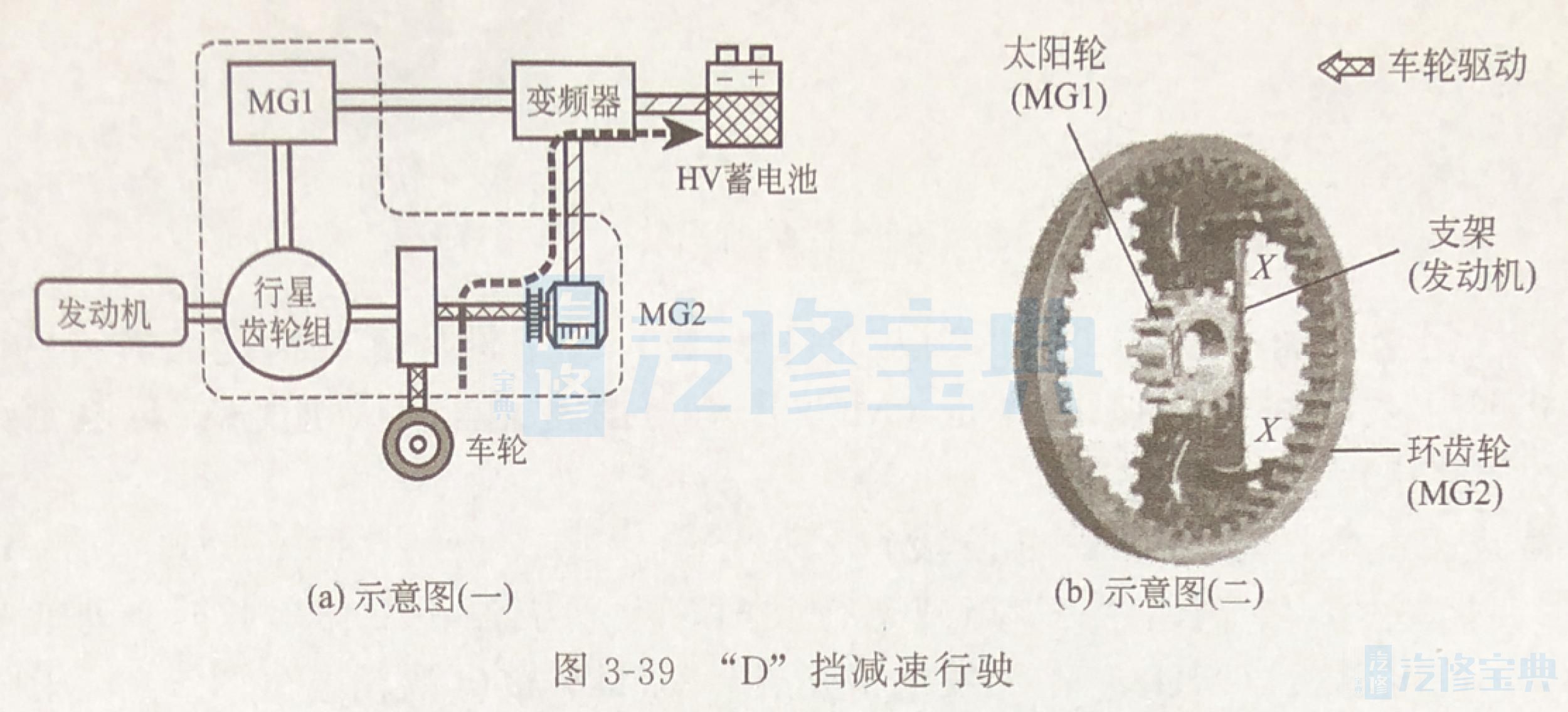
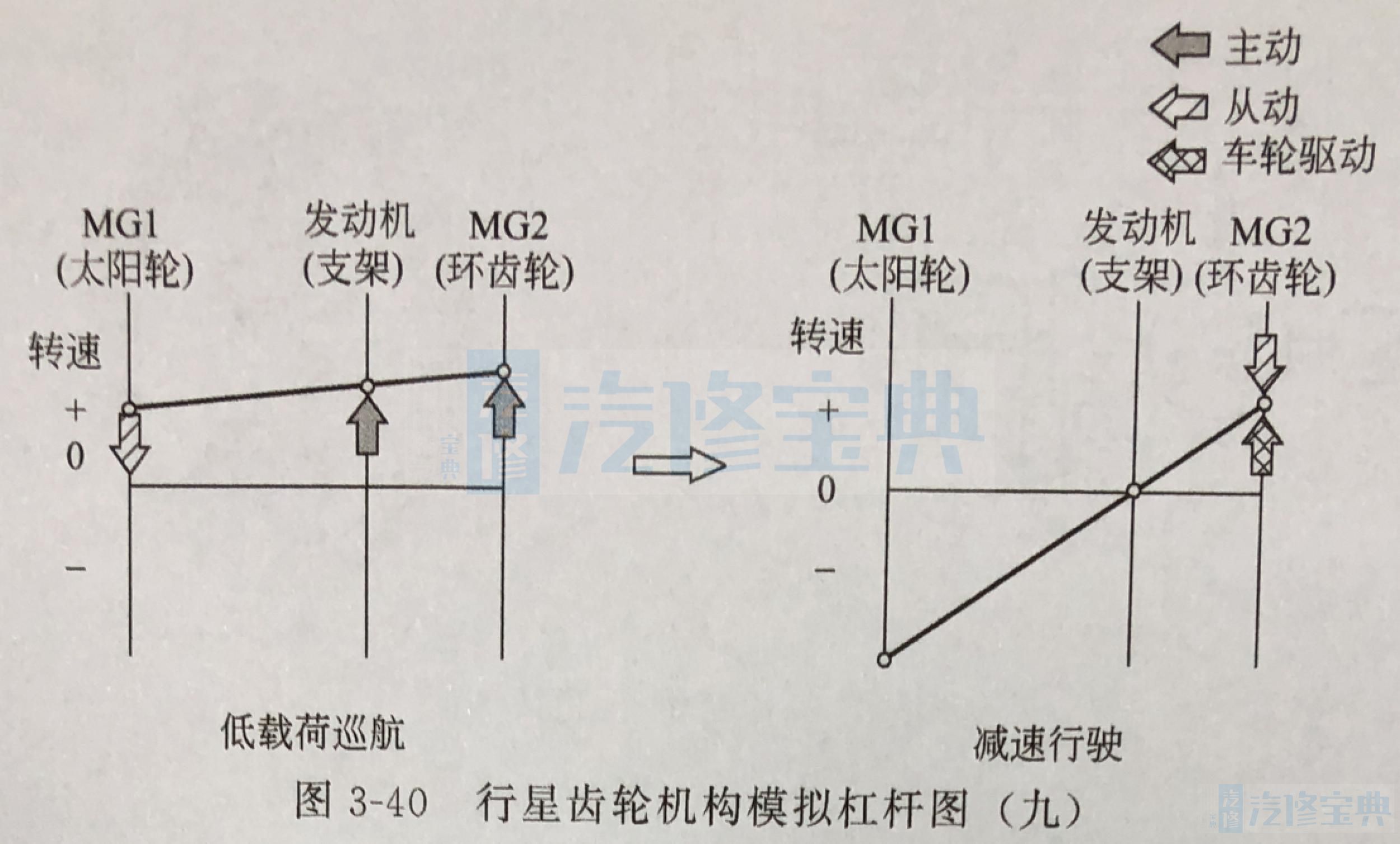
(6)减速1况(图3-20中的F阶段)①“D”挡减速。车辆以“D”挡减速行驶时,发动机停止工作。此时,车轮驱动电动机(MG2),使电动机(MG2)作为发电机运转,为HV蓄电池充电(图3-39、图3-40)。
车辆从较髙速度开始减速时,发动机以预定速度继续工作,保护行星齿轮机构。
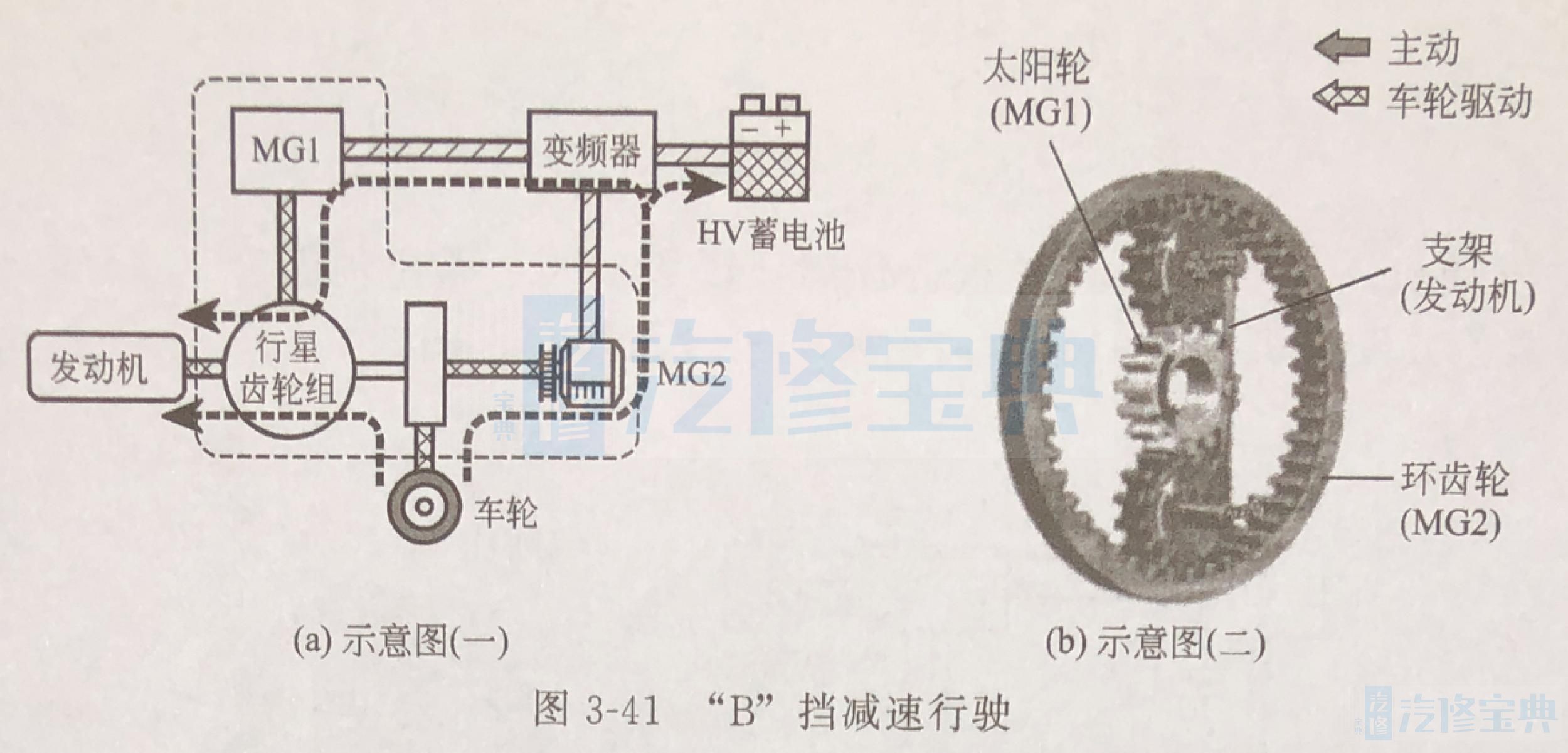
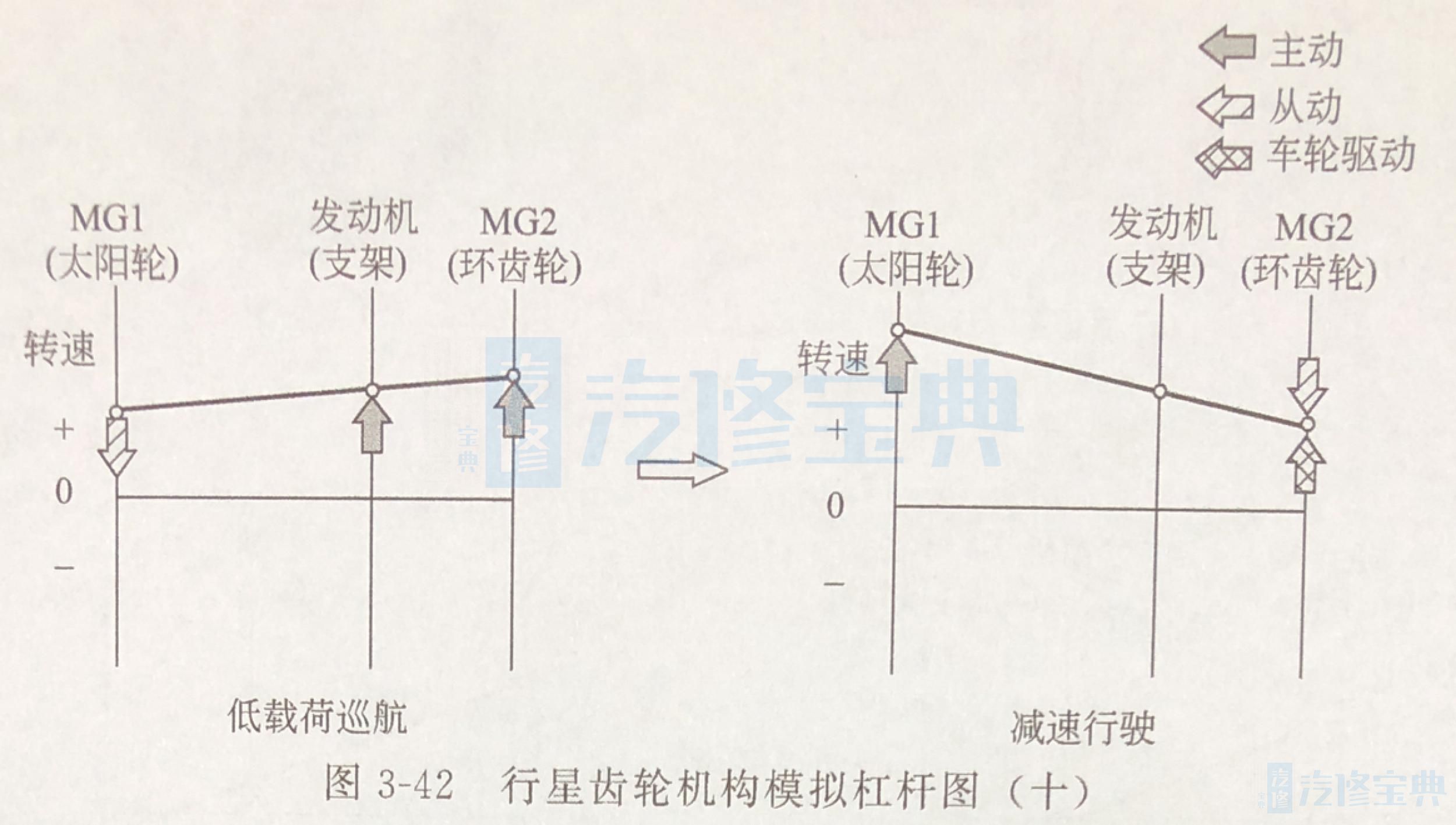
②“B”挡减速行驶。车辆以“B”挡减速行驶时,车轮驱动电动机(MG2),使电动机(MG2)作为发电机工作,为HV蓄电池进行充电,并为发电机(MG1)供电。这样,MG1保持发动机转速并施加发动机制动(图3-41、图3-42)。此时,发动机燃油供给被切断。
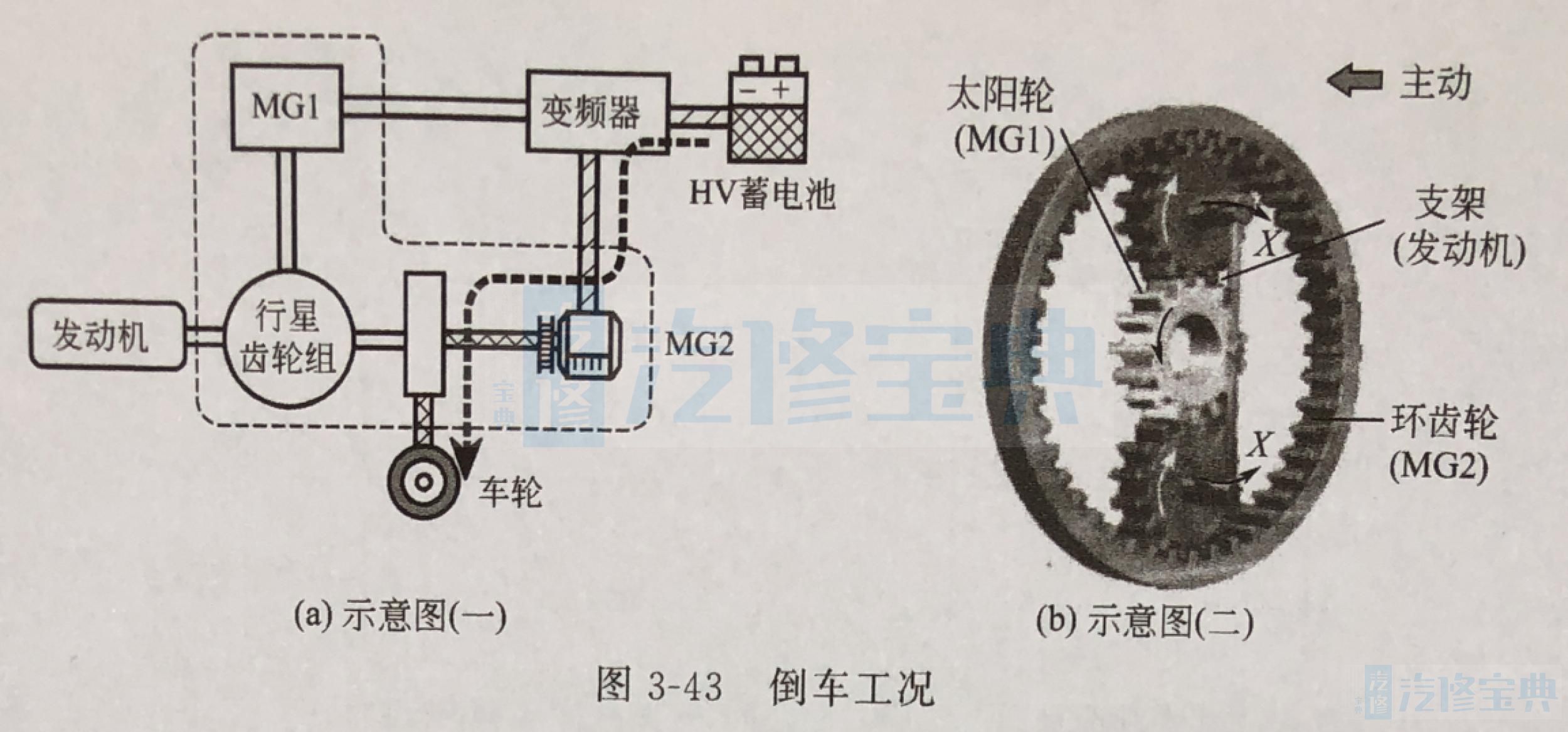
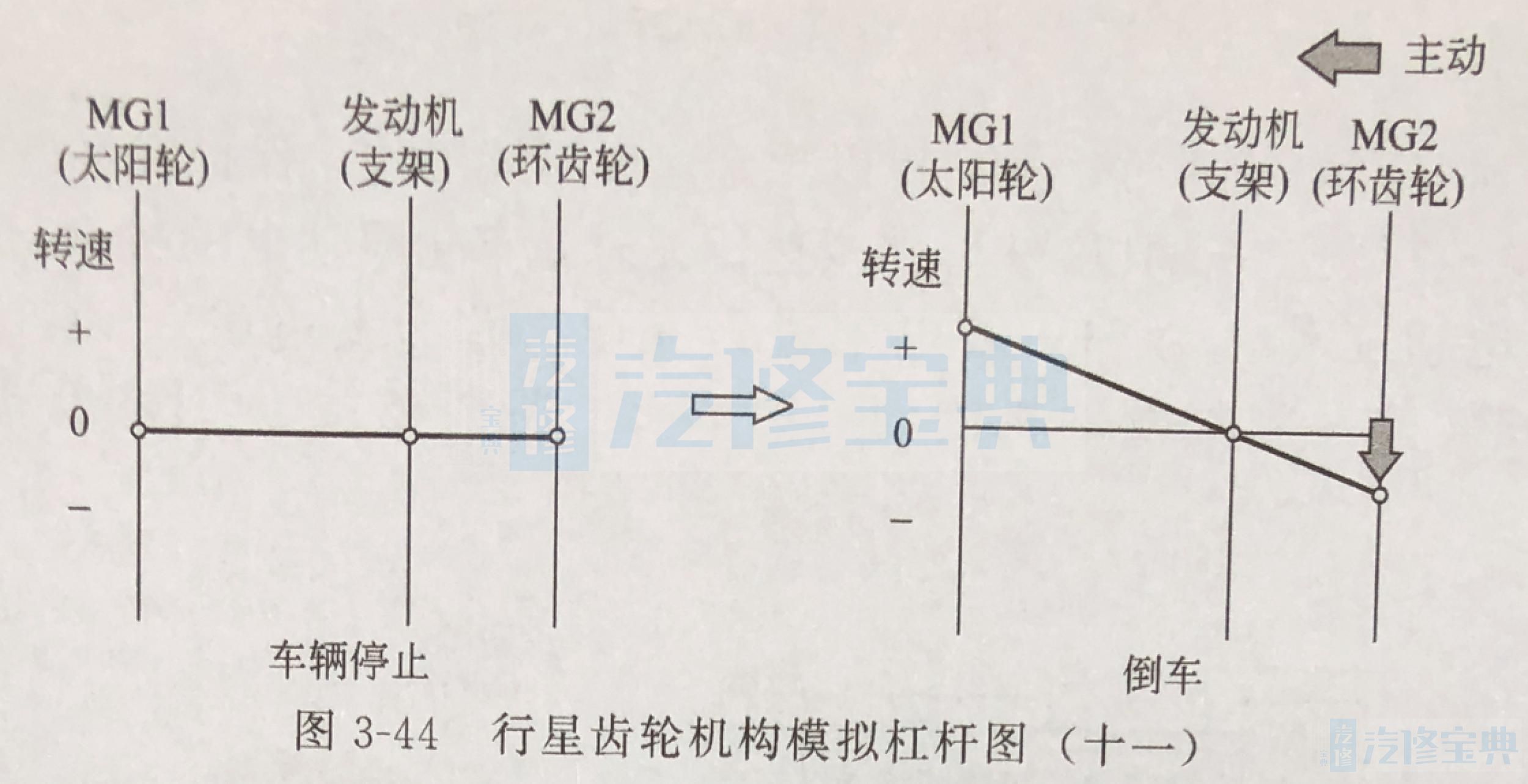
(7)倒车工况(图3-20中G阶段)①车辆倒车。仅由电动机(MG2)为车辆提供动力。此时,电动机(MG2)反向旋转,发动机不工作,发电机(MG1)正向旋转但是不发电(图3-43、图3-44)。
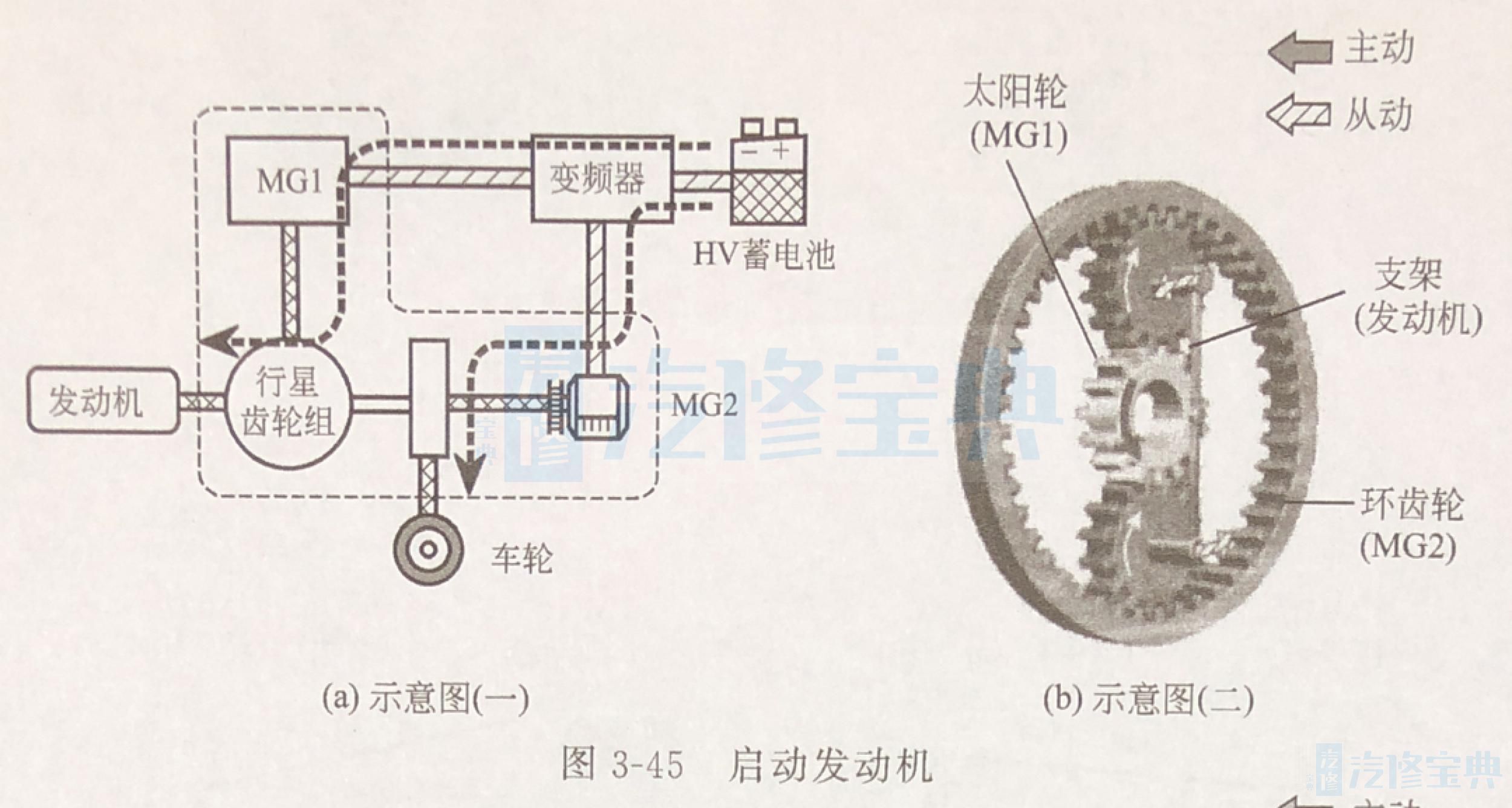
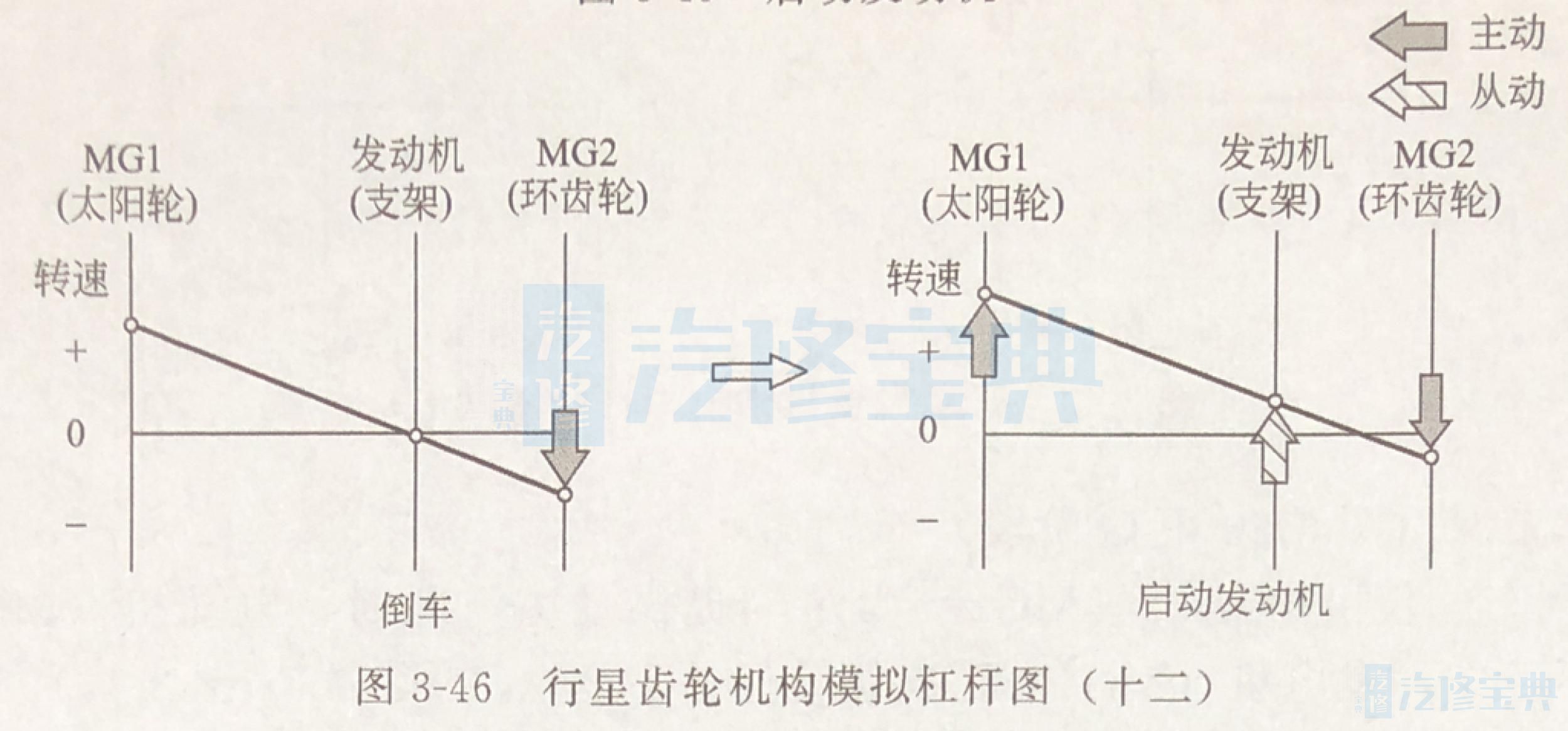
②启动发动机。若 HV ECU监视的任何项目如SOC、蓄电池温度、水温和电载荷状况与规定值有偏差,发电机(MG1)将启动发动机(图3-45、图3-46)。
在随后的状态中,已经启动的发动机驱动发电机(MG1),为HV蓄电池进行充电(图3-47、图3-48)。