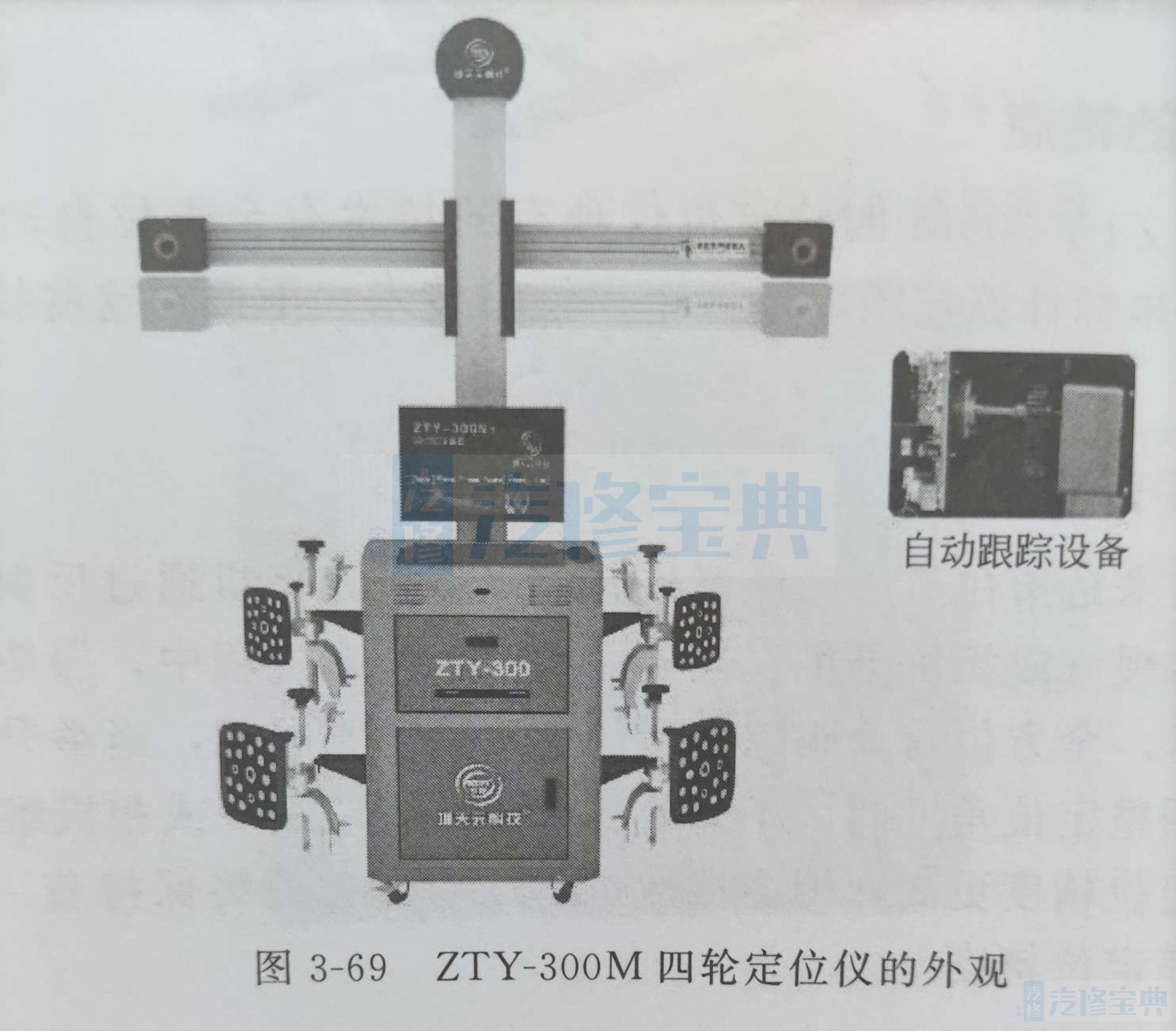
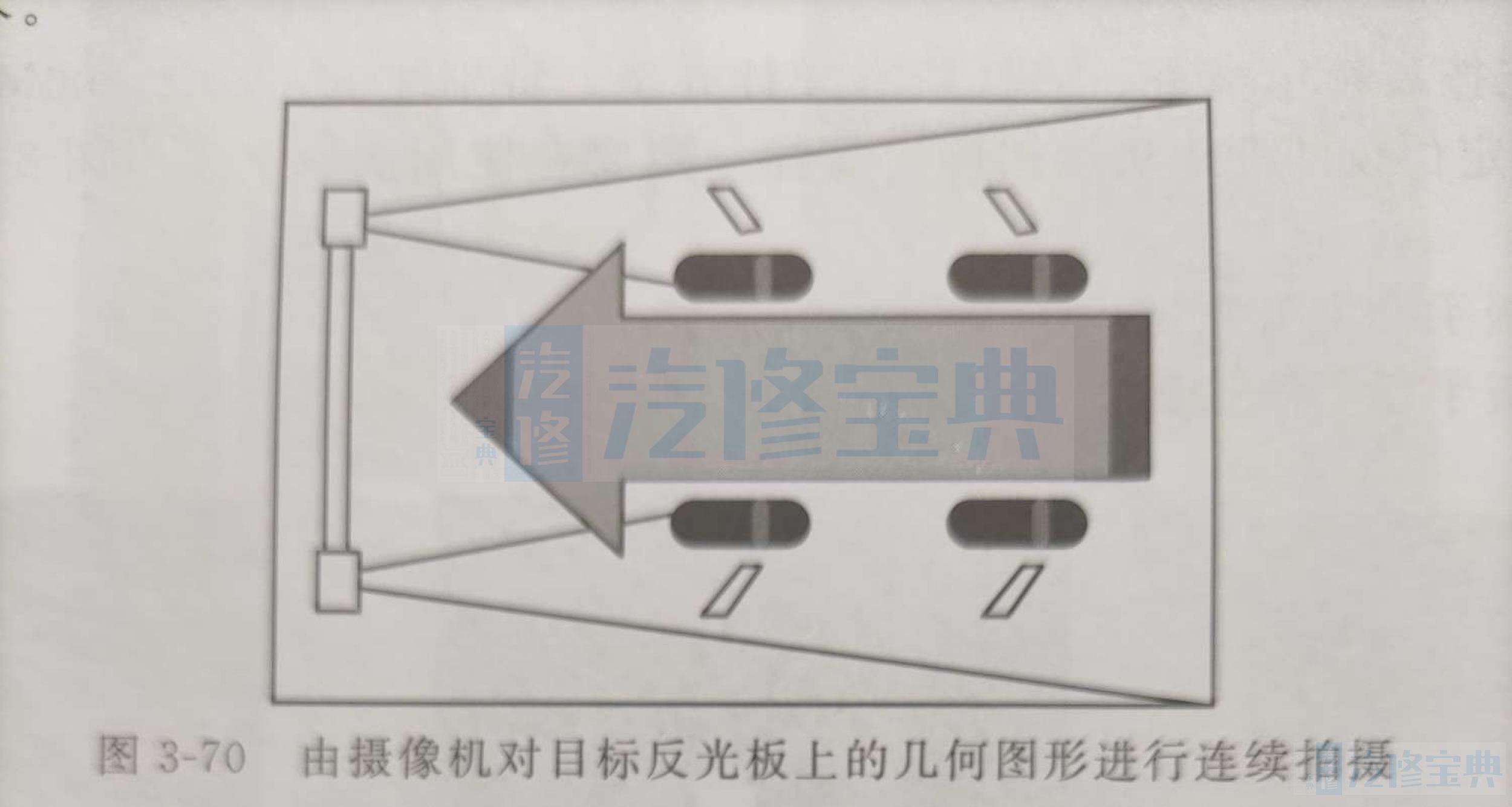
相对于传统CD四轮定位仪,现代3D四轮定位仪的结构要简单得多,对于全自动跟踪豪华版ZTY30M四轮定位仪(图3-69)而言,主要包括三大部分:由2个摄像头、4个标靶和4个轮夹组成的数据采集部分;由计算机和显示器组成的数据处理与显示部分;以及控制横梁自动跟踪的电动机驱动部分。 将4个目标反光板安装在车辆的4个轮辋上,推动车辆,由摄像机对目标反光板上的几何图形进行连续拍摄(图3-70),通过计算机对几何图形的变化进行分析与运算,从而得出车辆相应的定位参数,再由显示屏显示出来。该技术主要采用物理透视学的基本原理与计算机信息处理技术。
3D四轮定位仪的测量原理是四个车轮中心构成基础平面及定位四边形,车轮平面间的几何关系以及车轮平面与基础平面间的几何关系构成四轮定位仪角度,车轮转向过程中的车轮旋转轴线构成主销计算轴线。车辆移动过程中车轮旋转轴线与车轮平面几何角度变化构成偏心补偿计算基础,如图3-71所示。车辆测试过程动态建立车身参数空间立体坐标系,不受举升机倾斜影响。
其优势在于精度更高,功能更强大,其精度可以精准到0.1mm/0.01°;其功能除可实现所有传统参数外,并可测出轮偏等距离参数,轻松实现CCD与激光定位仪不可完成的许多功能,如单轮定位、前束锁定测量、空气悬架车辆定位等。操作更简便,故障率极低。目标反光板上无电子元器件、无须电池、无须数据传输,仅起图像反光作用;主体为金属支架,横梁多为铸体,抗腐抗压性强;电脑多为品牌高端配置,以适应超大数据处理,性能更稳定。其测量原理如图3-72所示。