(1)CAN总线的特点: CAN协议的一个最大特点是废除了传统的站地址编码,而代之以对通信数据块进行编码。 CAN总线为多主站总线,各节点可在任意时刻向网络上的其他节点发送信息,不分主从,通信灵活。 CAN总线采用独特的非破坏性总线仲裁技术,优先级高的节点优先传送数据,可满足实时性要求。
CAN总线具有点对点、一点对多点及全局广播传送数据的功能。
CAN总线采用短帧结构,每帧有效字节数最多为8个,数据传输时间短,并有CRC及其他校验措施,数据出错率极低。
CAN总线上某一节点出现严重错误时,可自动脱离总线,而总线上的其他操作不受影响。
CAN总线系统扩充时,可直接将新节点挂在总线上,因而走线少,系统扩充容易,改型灵活。
CAN总线最大传输速率可达1 Mbit/s(此时通信距离最长为40m),直接通信距离最远可达10km(速率5 kbit/s以下)。
CAN总线上的节点数主要取决于总线驱动电路。在标准帧(11位报文标识符)可达110个,而在扩展帧(29位报文标识符)其数量几乎不受限制。
(2)CAN总线的应用状态:
①驱动CAN数据总线通过15号接线柱切断,或经过短时无载运行后切断;舒适CAN数据总线由30号接线柱供电且必须保持随时可用状态。
为了尽可能降低对供电网产生的负荷,在“15号接线柱关闭”后,若总系统不再需要舒适CAN数据总线,那么舒适CAN数据总线就进入所谓的“休眠模式”。
③舒适CAN数据总线在一条数据线短路或一条数据线断路时,可以用另一条线继续工作,这时会自动切换到“单线工况”。
4驱动CAN数据总线的电信号与舒适CAN数据总线的电信号是不同的。
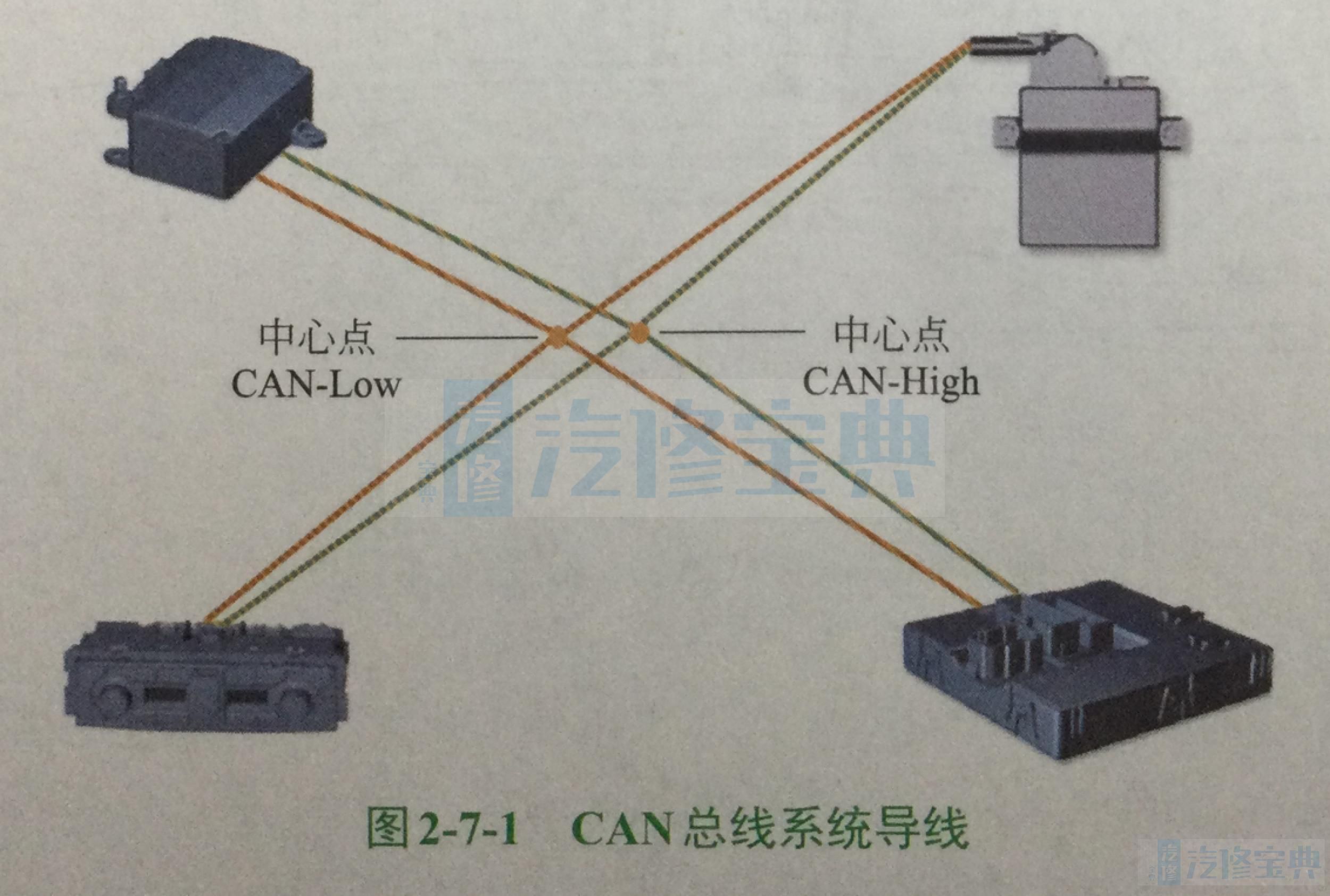
(3)CAN总线系统导线:
①CAN数据总线为双线式,脉冲频率为100 kbit/s(舒适数据总线)或500 kbit/s(驱动数据总线)。
CAN舒适数据总线也称为低速总线,CAN驱动数据总线也称为高速总线。
各个CAN系统的所有控制单元都并联在CAN数据总线上(图2-7-1)。
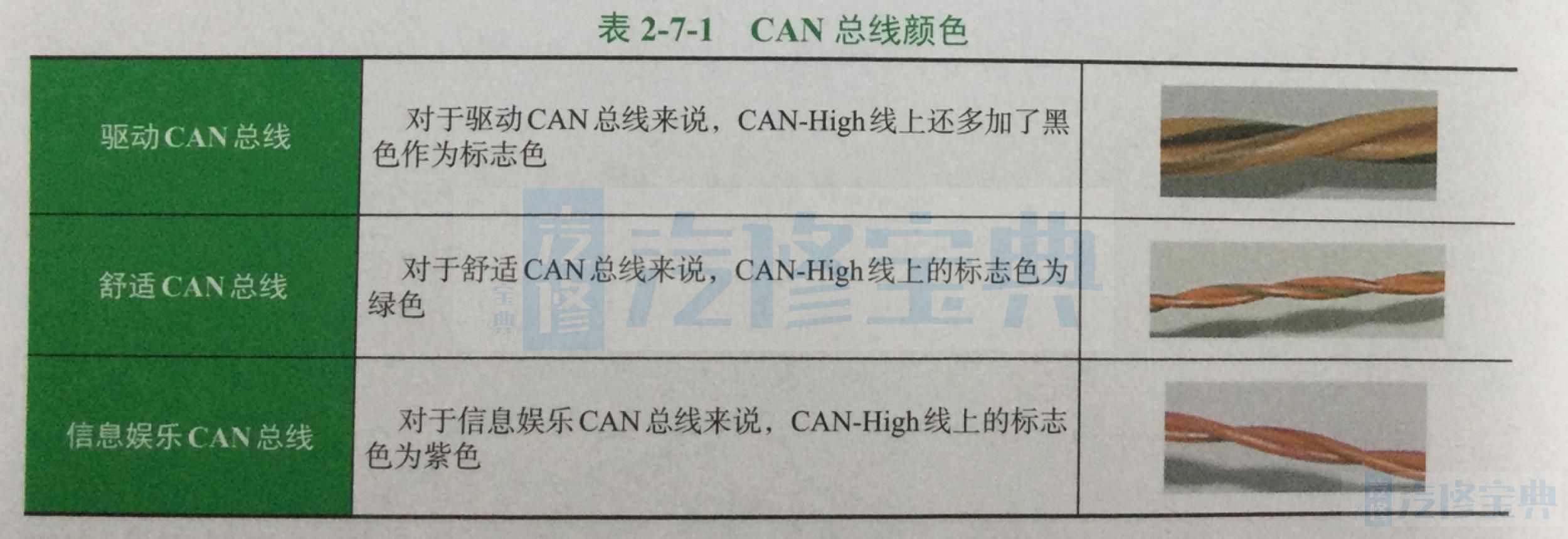
CAN数据总线的两条导线分别称为 CAN-High和CAN-Low。两条扭绞在一起的导线称为双绞线。控制单元之间的数据交换就是通过这两条导线来完成的,这些数据可能是发动机转速、油箱油面高度及车速等,CAN导线的基色为橙色。CAN总线颜色见表2-7-1。
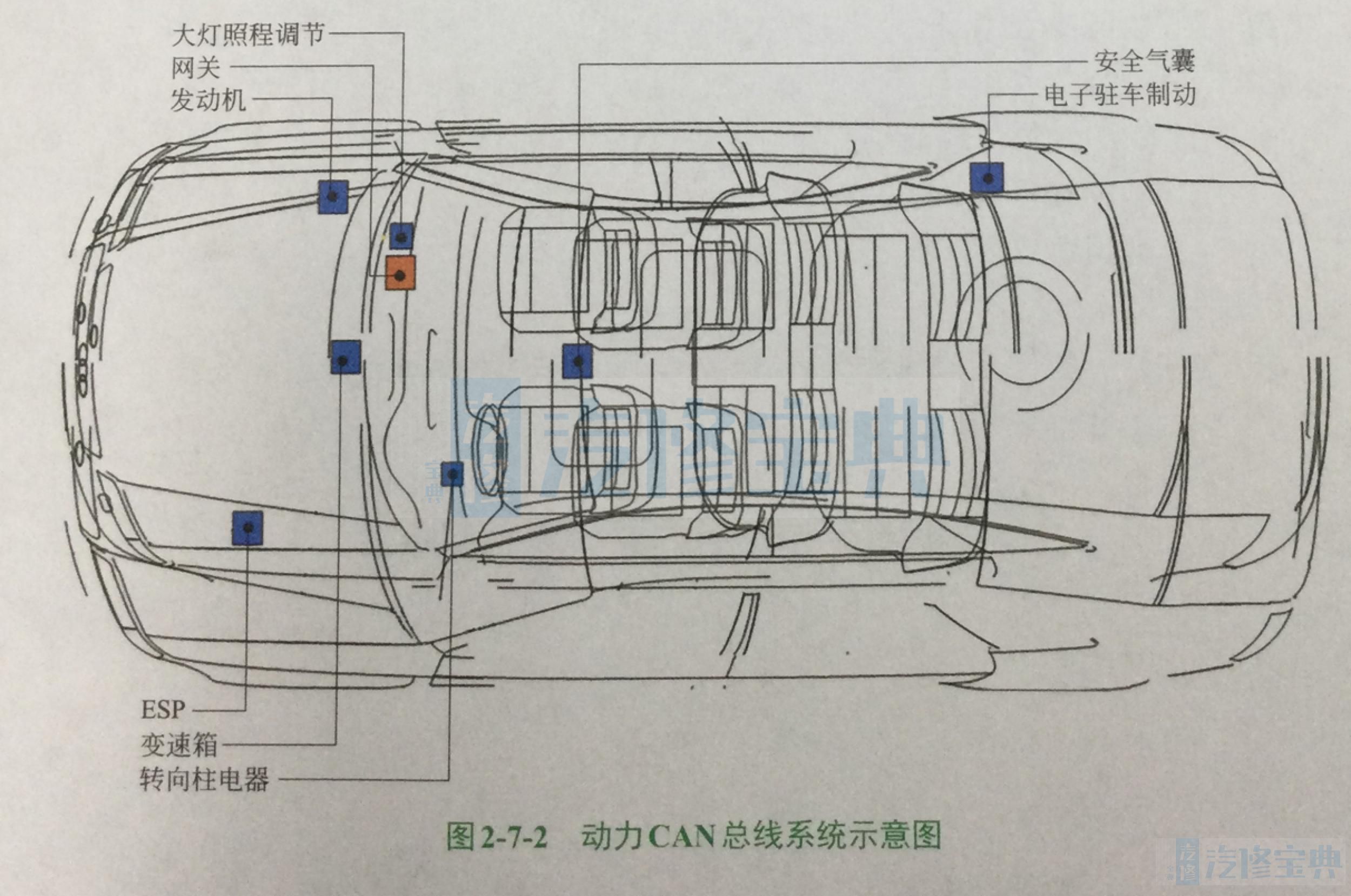
(4)动力CAN总线系统:
①动力CAN总线系统示意图如图2-7-2所示。
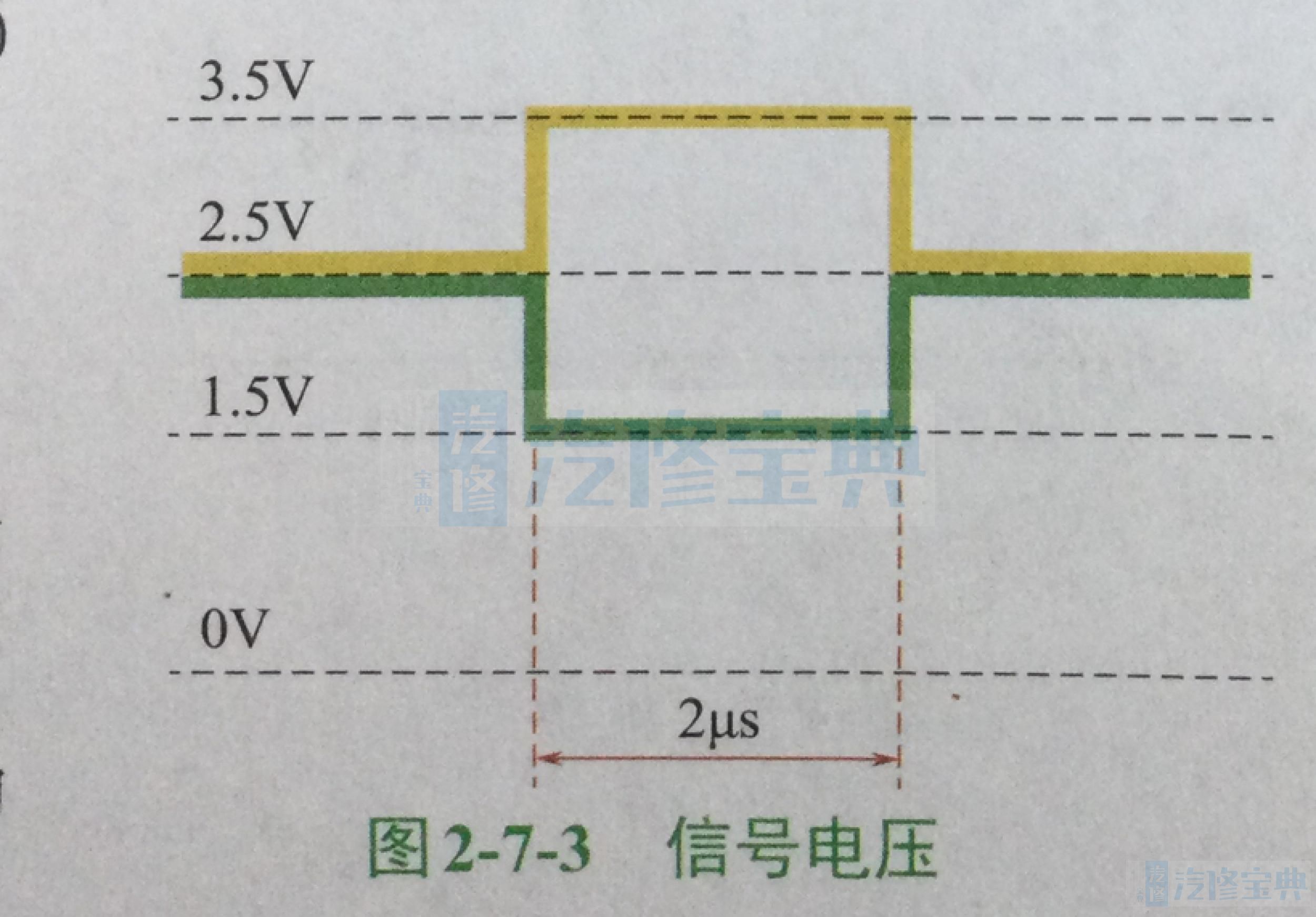
驱动CAN总线上的信号电压。在静止状态时,这两条导线上作用有相同预先设定值,该值称为静电平。对于动力CAN总线来说,这个值大约为2.5V。静电平也称为隐性状态,因为连接的所有控制单元均可修改它。
在显性状态时, CAN-High线上的电压值会升高一个预定值,这个值至少为1V。而CAN-Low线上的电压值会降低一个同样值。于是在CAN驱动数据总线上,CAN-High线就处于激活状态,其电压不低于3.5V(2.5V+1V=3.5V),而 CAN-Low线上的电压值最多可降至1.5V(2.5V-1V=1.5V)图2-7-3)。
在显性状态时, CAN-High线的电压升至约3.5V。
在隐性状态时,这两条线的电压均为约2.5V(静电平)。
在显性状态时, CAN-High线的电压降至约1.5V。
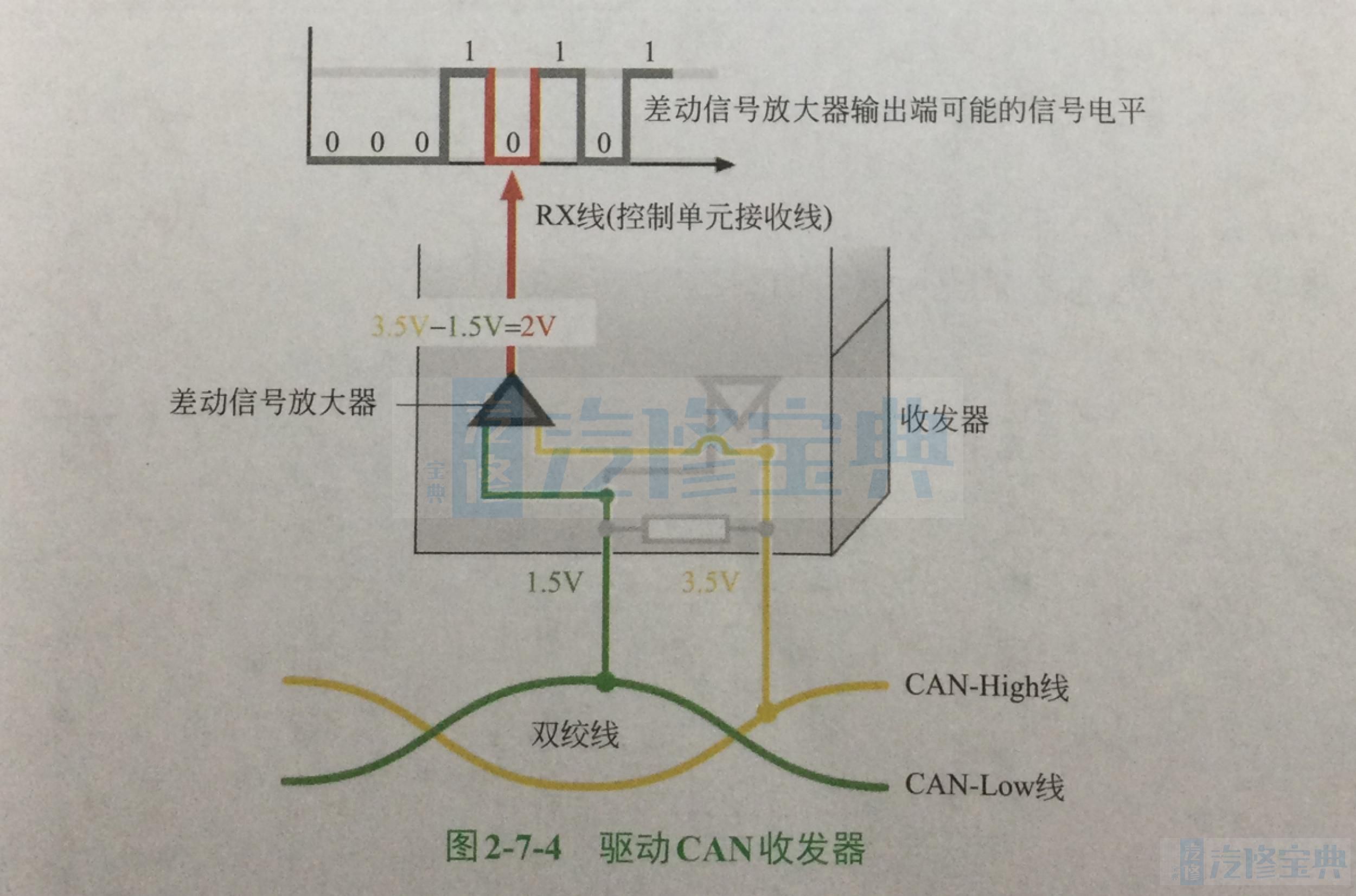
驱动CAN收发器。收发器内的 CAN-High线和CAN-Low线上的信号转换控制单元是通过收发器连接到CAN驱动总线上的,在这个收发器内有一个接收器,该接收器是安装在接收一侧的差动信号放大器(图2-7-4)。
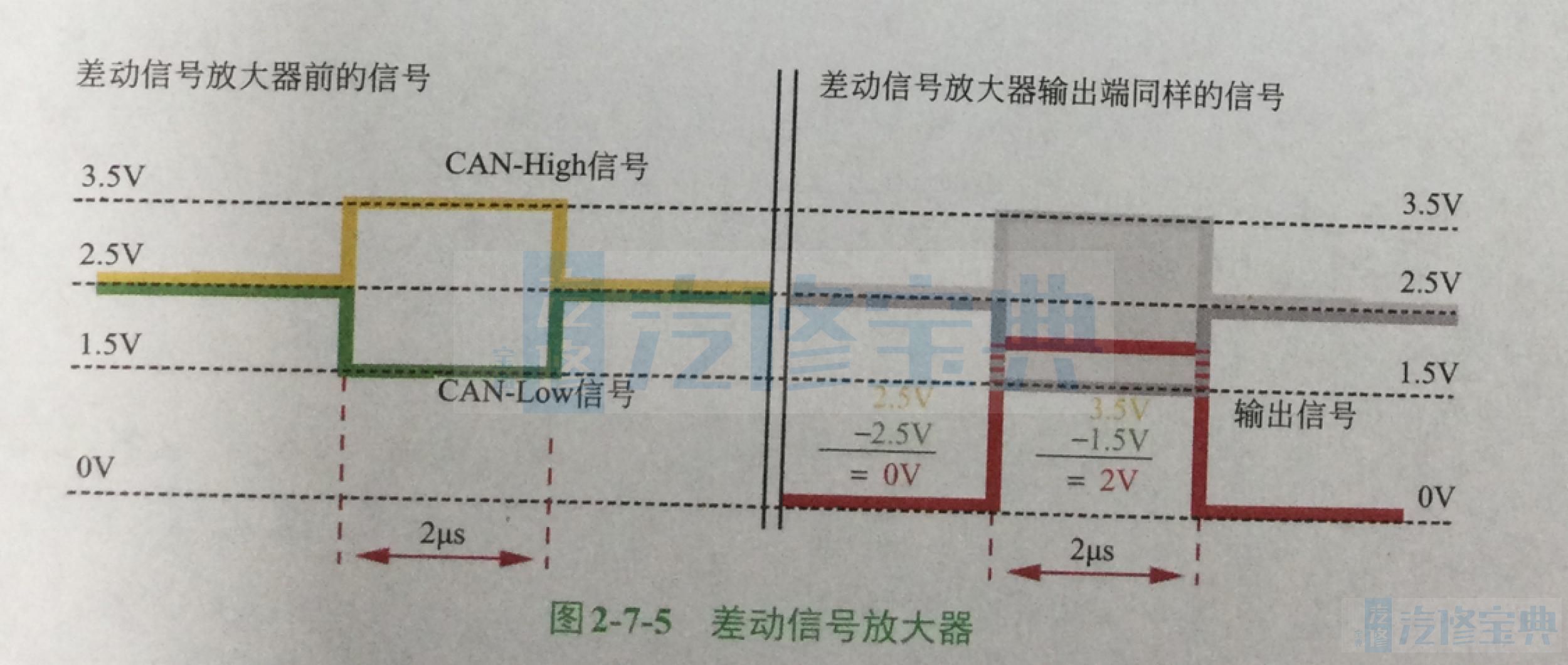
差动信号放大器用于处理来自 CAN-High线和 CAN-LOW线的信号,除此以外还负责将转换后的信号传至控制单元的CAN接收区(图2-7-5),这个转换后的信号称为差动信号放大器的输出电压。
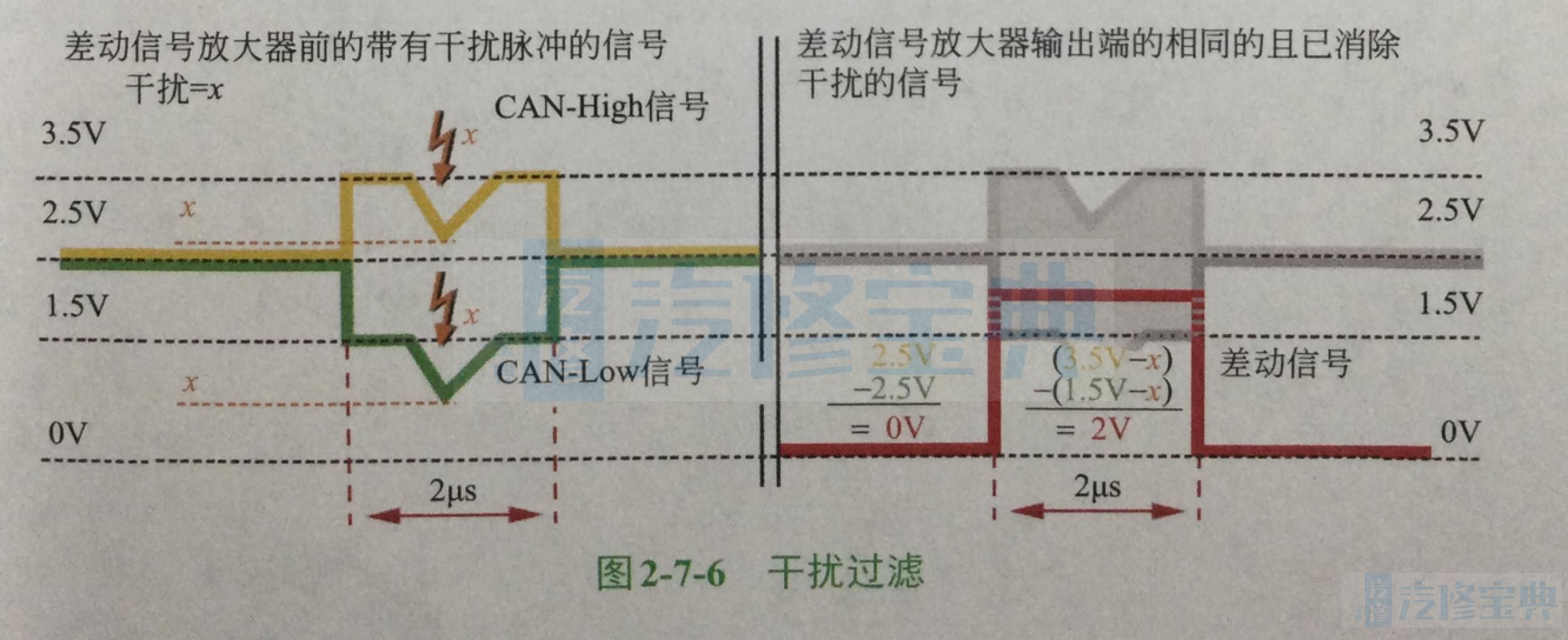
CAN驱动数据总线差动信号放大器内的干扰过滤。由于数据总线也要布置在发动机舱内,所以数据总线就要遭受各种干扰。在保养时要考虑对地短路和蓄电池电压、点火装置的火花放电和静态放电(图2-7-6)。
(5)舒适CAN总线系统:
①舒适CAN总线系统示意图如图2-7-7所示。
②舒适CAN数据总线上的信号电压。首先,由于使用了单独的驱动器(功率放大器),这两个CAN信号就不再有彼此依赖的关系了。与CAN驱动数据总线不同,CAN舒适/ Infotainment数据总线的 CAN-High线和 CAN-LoW线不是通过电阻相连的。也就是说: CAN-High线和 CAN-LOW线不再彼此相互影响,而是彼此独立作为电压源来工作。
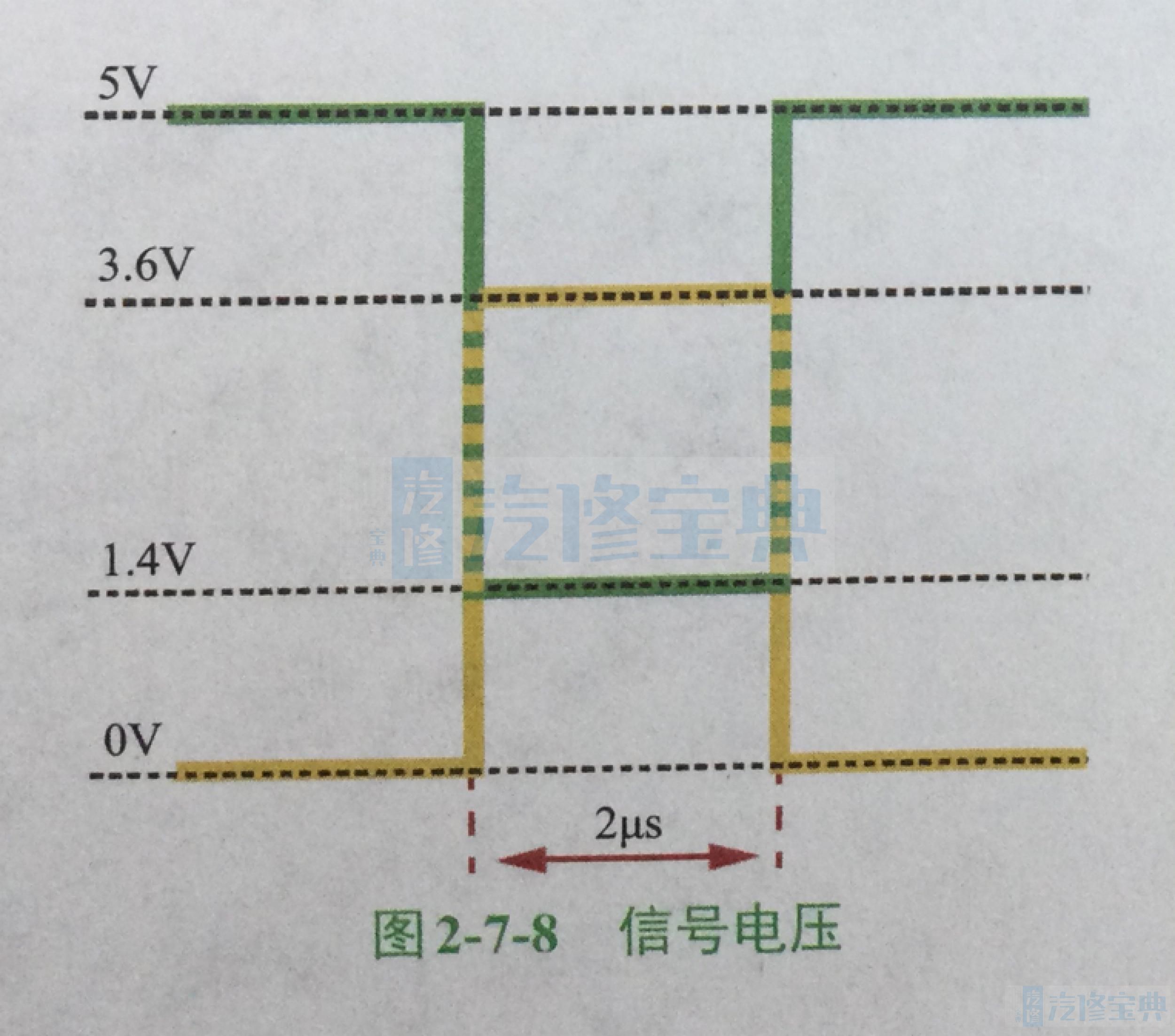
另外还放弃了共同的中压,在隐性状态(静电平)时, CAN-High信号为0V,在显性状态时≥3.6V。对于 CAN-LOW信号来说,隐性电平为5V,显性电平≤1.4V,如图2-7-8所示。
于是在差频信号放大器内相减后,隐性电平为-5V,显性电平为2.2V,那么隐性电平和显性电平之间的电压变化(电压提升就提高到≥7.2V。
在显性状态时, CAN-Low线的电压降至约1.4V。
在隐性状态时, CAN-High线的电压均为约为0V, CAN-Low线的电压约为5V。
在显性状态时, CAN-High线的电压降至约3.6V。
③舒适CAN数据总线的CAN收发器。CAN舒适/ infotainment数据总线的收发器,其工作原理与CAN驱动数据总线收发器基本是一样的,只是输出的电压电平和出现故障时切换到 CAN-High线或 CAN-LOW线(单线工作模式)的方法不同。另外CAN-High线和 CAN-Low线之间的短路会被识别出来,并且在出现故障时会关闭 CAN-Low驱动器,在这种情况下, CAN-High线和 CAN-Low线的信号是相同的(图2-7-9)。
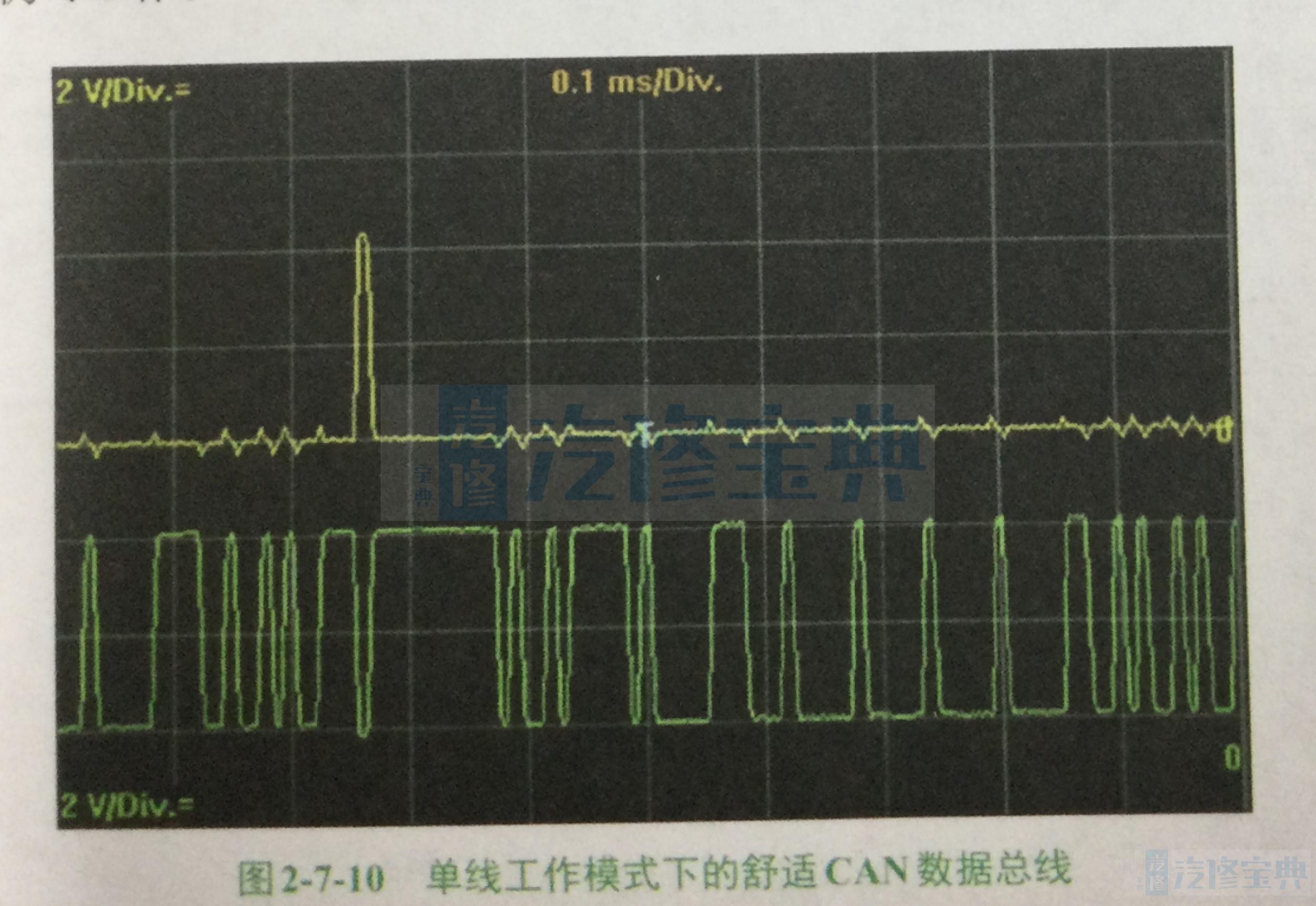
单线工作模式下的舒适CAN数据总线。如果因断路、短路导致两条CAN导线中的一条不工作了,那么就会切换到单线工作模式(图2-7-10)。
在单线工作模式下,只使用完好的CAN导线中的信号,这样就使得舒适CAN数据总线仍可工作。
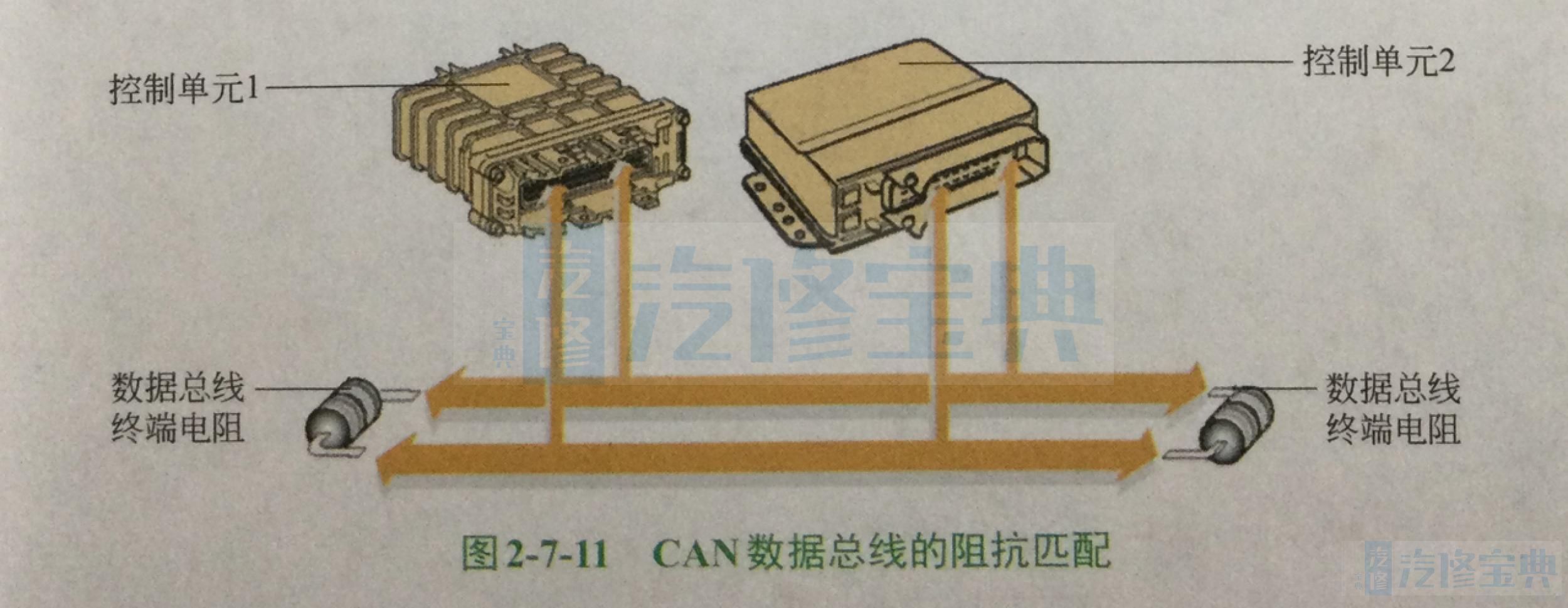
CAN数据总线的阻抗匹配。数据传输终端是一个终端电阻,为防止数据在导线终端被反射产生反射波,反射波会破坏数据。在驱动CAN总线系统中,它接在CAN-High线和 CAN-Low线之间。标准CAN数据总线系统中,在数据总线的两端接有两个终端电阻(图2-7-11)。
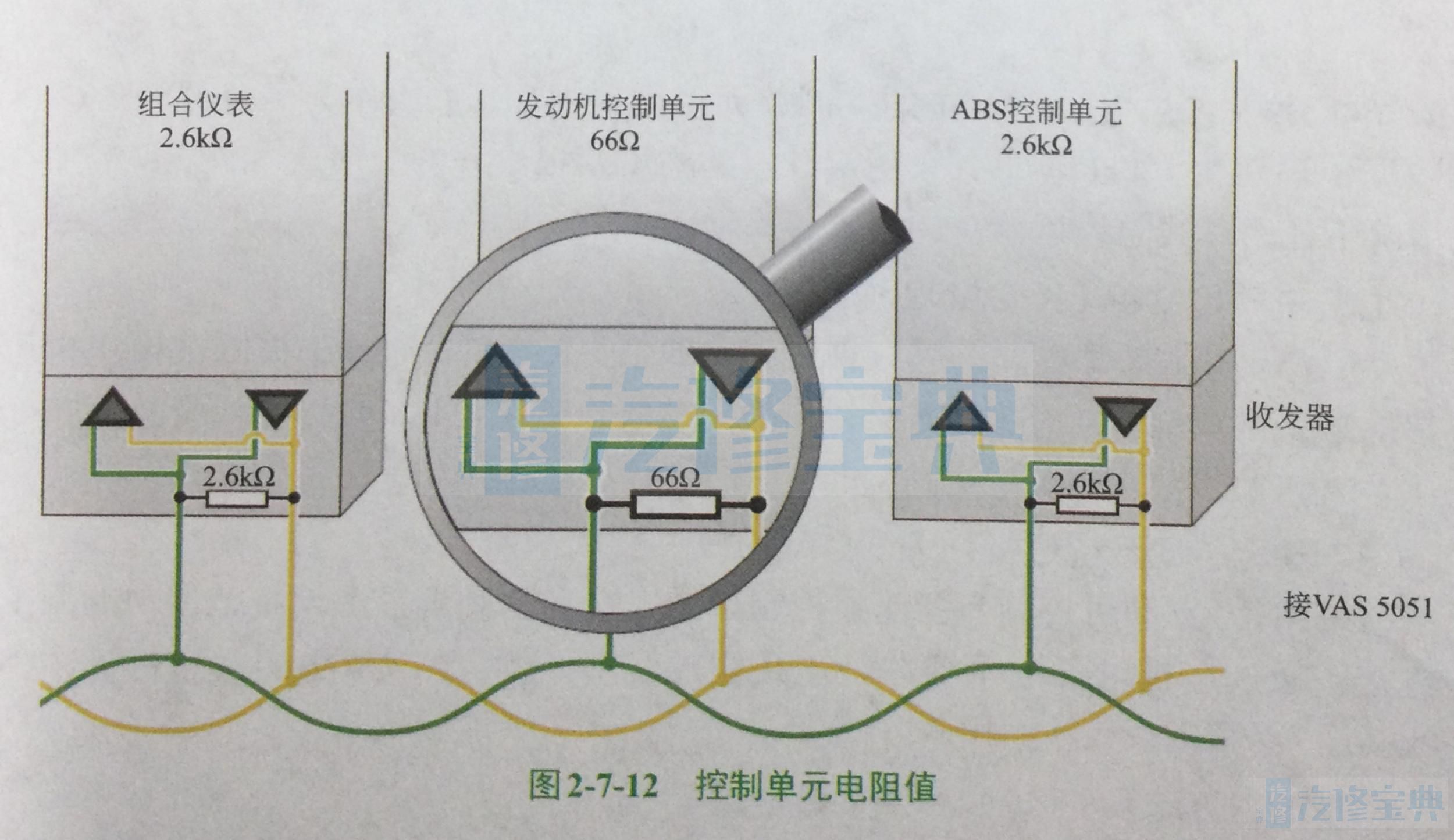
现在某些车型将负载电阻分布在各个控制单元内部,其中在发动机控制单元中装有“中央终端电阻”,其他控制单元中安装大电阻,例如大众品牌部分车型中设置有两种终端电阻,包括66欧和2.6k欧(图2-7-12)。
⑥CAN数据总线的抗干扰。
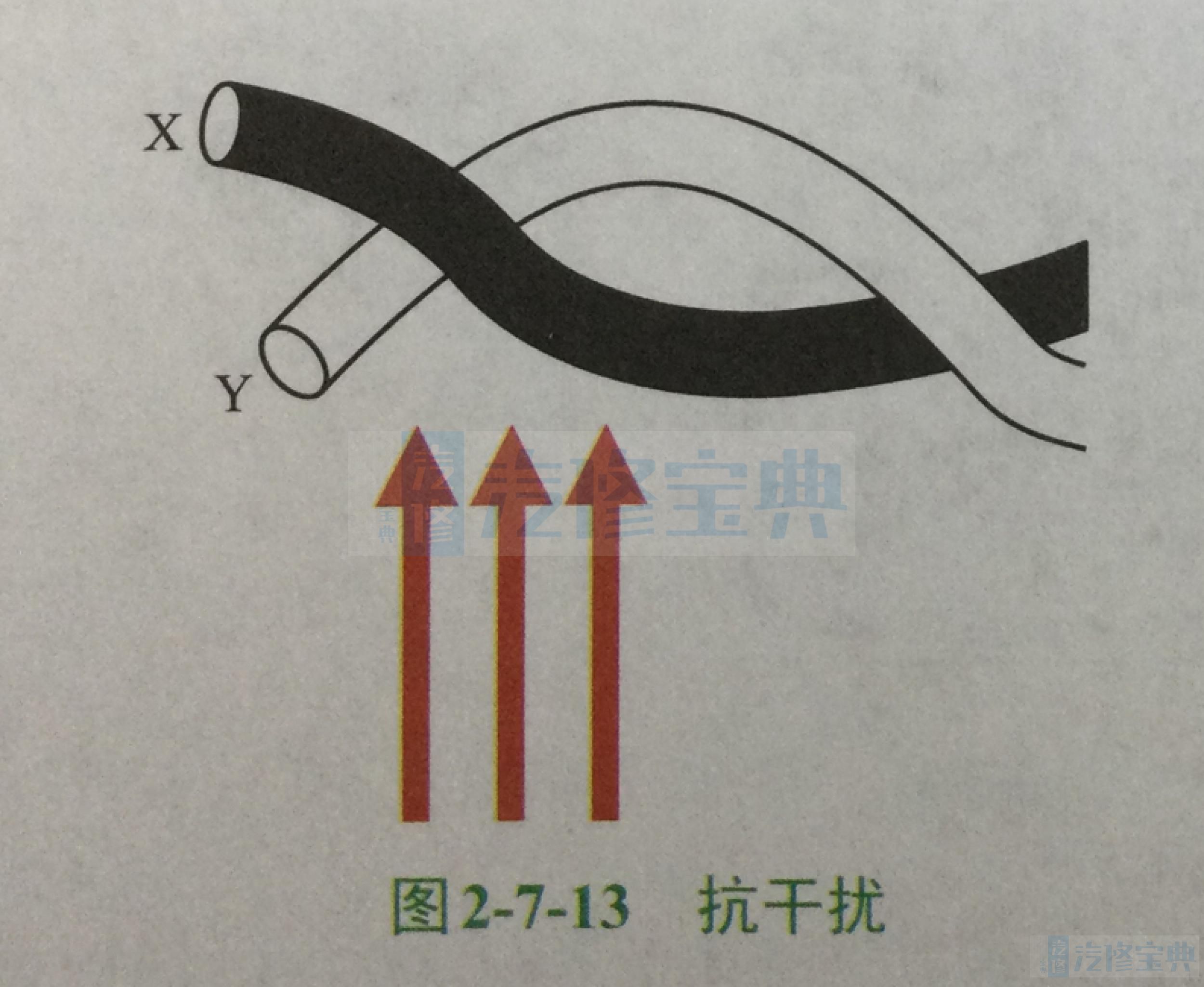
a.抗干扰。干扰源:运行时产生电磁波的部件是车辆中的干扰源(图2-7-13)。
双绞线保证外界的干扰对CAN数据总线的两根数据线的干扰影响基本相同,在两个线路上电压的变化大小一样,然而方向相反。因此两个向外反射的线路的电压总和,总是恒定的。两个电压的差值(逻辑内容)与外界影响电压无关,总是一样大小。
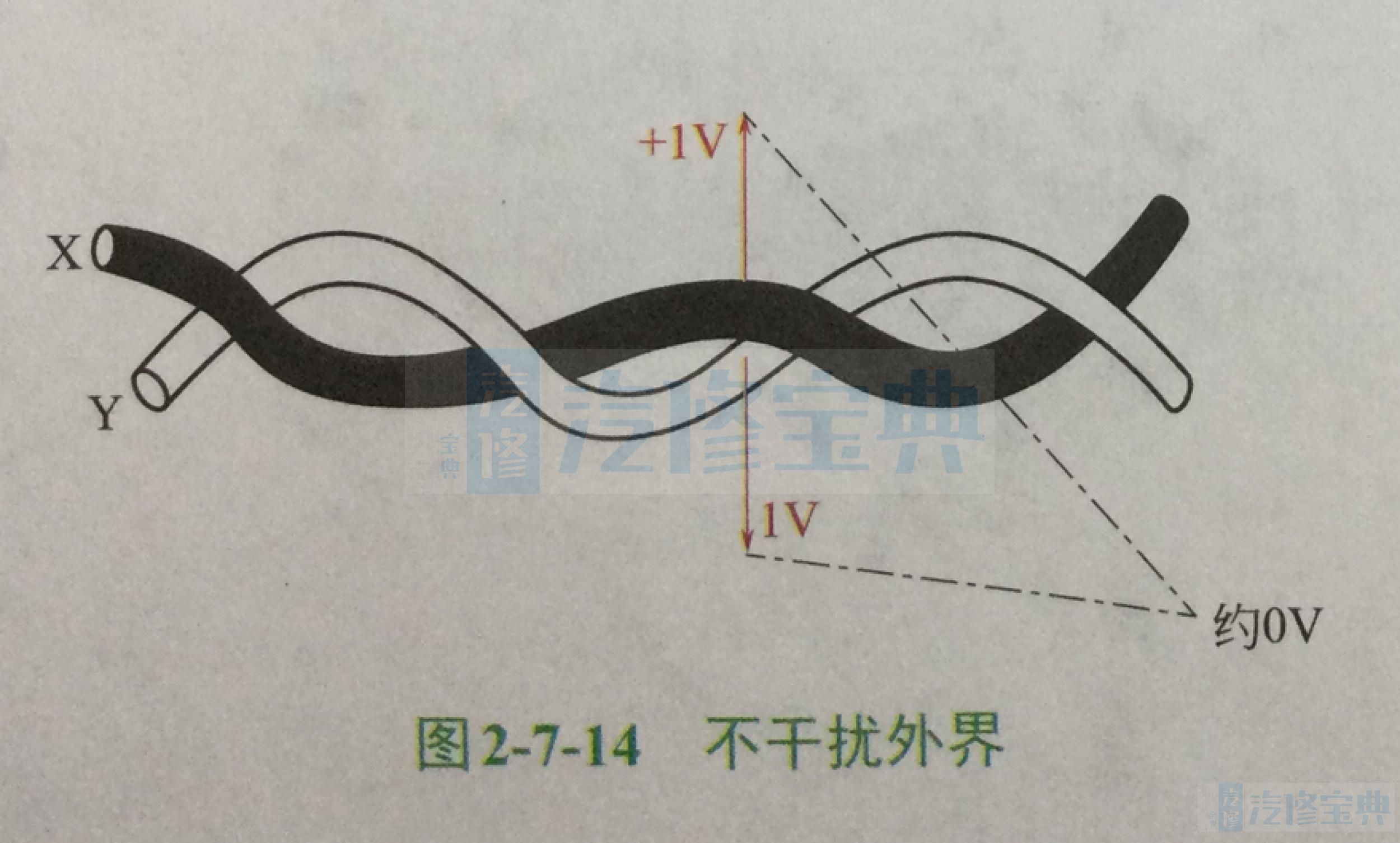
b.不干扰外界。CAN数据总线采用双绞线可以保证两根数据线对外界任意一点的距离基本相同,由于CAN收发器发送到两根数据线上的信号成镜像关系,因此,CAN总线的CAN-High线对外辐射和CAN-Low线对外辐射具有幅值相同、方向相反的特点。因此,使得CAN数据总线的两根数据线对外界任意一点的干扰影响自行运算抵消(图2-7-14)。
2.宝马G11/G12CAN总线上的控制单元:
(1)车身CAN(K-CAN):
K-CAN用于部件的低数据传输率通信,K-CAN通过中央网关模块也可与其他
总线系统连接。一些K-CAN中的控制单元使用一根LIN总线作为子总线,K-CAN的数据传输率为100 kbit/s,并采用双绞线结构(两根绞合的导线),K-CAN可在故障情况下作为单线总线运行。
(2)车身CAN2(K-CAN2):
K-CAN2用于控制单元的高数据传输率通信,K-CAN2通过中央网关模块也可与其他总线系统连接。一根LIN总线作为子总线连接在K-CAN2内的所有控制单元上,K-CAN2的数据传输率为500kbit/s,并采用双绞线结构。
(3)动力传动系统CAN( PT-CAN):
PT-CAN将发动机控制与变速器控制以及安全和驾驶者辅助系统范围内的系统相连接,通过连接至各个系统的分支线构成线型结构, PT-CAN的数据传输率为500 kbit/s,并采用双绞线结构。
(4)动力传动系统CAN2( PT-CAN2):
PT-CAN2是发动机控制范围内的 PT-CAN的一个冗余,也用于将信号传送至燃油泵控制, PT-CAN2的数据传输率为500 kbit/s,结构是双导线配以辅助唤醒导线。
(5)K-CAN2上的控制单元:
挂车模块AHM(图2-7-15)。
挂车模块负责:
a.控制挂车照明装置并为其供电;
b.以电动机械方式操作挂车牵引钩。
车顶功能中心FZD(图2-7-16)。根据车辆配置,车顶功能中心FZD包括以下相应组件:
a.防盗报警装置;
b.滑动天窗控制装置;
c.手势摄像机。
在带有手势控制功能的车辆上,在车顶功能中心内装有手势摄像机。在宝马诊断系统内不将手势摄像机显示为控制单元。通过车顶功能中心进行诊断。手势摄像机与 PT-CAN4连接,因此无需通过车身域控制器将总线电码传输到另一个CAN总线上。
车顶功能中心不负责控制车内照明装置。车内照明灯单元和车顶功能中心电子系统安装在同一个壳体内。
后部空调系统HKA(图2-7-17)。后部空调系统控制单元服务于除四区空调系统外作为选装配置提供的后部空调系统。它负责控制和调节后座区的HKL组件。
后备厢盖功能模块HKFM(图2-7-18)。后备厢盖功能模块控制单元负责控制后备厢盖举升装置。
⑤座椅模块(图2-7-19)。根据车辆配置使用以下座椅模块:
a.驾驶员座椅模块SMFA;
b.前乘客座椅模块SMBF;
c.驾驶员侧后部座椅模块SMFH;
d.前乘客侧后部座椅模块 SMBFH。
座椅模块位于相应座椅内,用于控制伺服电机。根据配置情况,必要时车内可安装四个相同的座椅模块。通过导线束接口进行控制单元设码。根据附加接地设码对车内控制单元进行相应分配。
⑥座椅气动模块(图2-7-20)。根据车辆配置使用以下座椅气动模块:
a.左前座椅气动模块 SPNMVL;
b.右前座椅气动模块 SPNMVR;
c.左后座椅气动模块 SPNMHL;
d.右后座椅气动模块 SPNMHR。
座椅气动模块在相应座椅内负责控制按摩功能。根据配置情况,必要时车内可安装两个或四个相同的座椅气动模块。通过导线束接口进行控制单元设码。根据附
加接地设码对车内控制单元进行相应分配。
(6)K-CAN3上的控制单元:
前部车灯电子装置(图2-7-21)。左侧前部车灯电子装置FLEL和右侧前部车灯电子装置FLER的控制单元安装在左侧和右侧前灯内。
前部车灯电子装置包括:
a.控制相应前灯内的LED;
b.控制前灯照明距离调节装置步进电动机。
倒车摄像机RFK。进行批量生产时,在G11/G12上采用一个连接K-CAN4的倒车摄像机。以后会改为以太网连接。
驻车操作辅助系统PMA(图2-7-22)。根据配置情况,PMA控制单元执行相应功能:
a.驻车距离监控系统PDC(标配);
b.驻车辅助系统(SA5DP);
c.高级驻车辅助系统(SA5DV)。
驻车距离监控系统PDC可在驶入和驶出停车位时为驾驶员提供支持。在此通过声音信号和视觉显示告知目前与障碍物的距离。
驻车辅助系统可使停车入位更加简便。高级驻车辅助系统可实现遥控停车。
在带有驻车操作辅助系统PMA的车辆上使用驻车距离监控系统PDC的所有传感器。此外在前后左右车轮罩饰板内也各有一个PMA传感器。高级驻车辅助系统还需要车辆的摄像机系统。
④车道变更警告系统。图2-7-23显示了车道变更警告系统中的2个控制单元,即SWw(主控单元)和SWW2(副控单元)。SWW位于右侧,SWW2位于左侧。
SwW用于以下选装配置:
a.车道变更警告系统SA5AG;
b.高级行驶辅助系统SA5AT;
c.顶级行驶辅助系统SA5AU。
SWw2(副控单元)用于选装配置高级行驶辅助系统和顶级行驶辅助系统。
(7)K-CAN4上的控制单元:
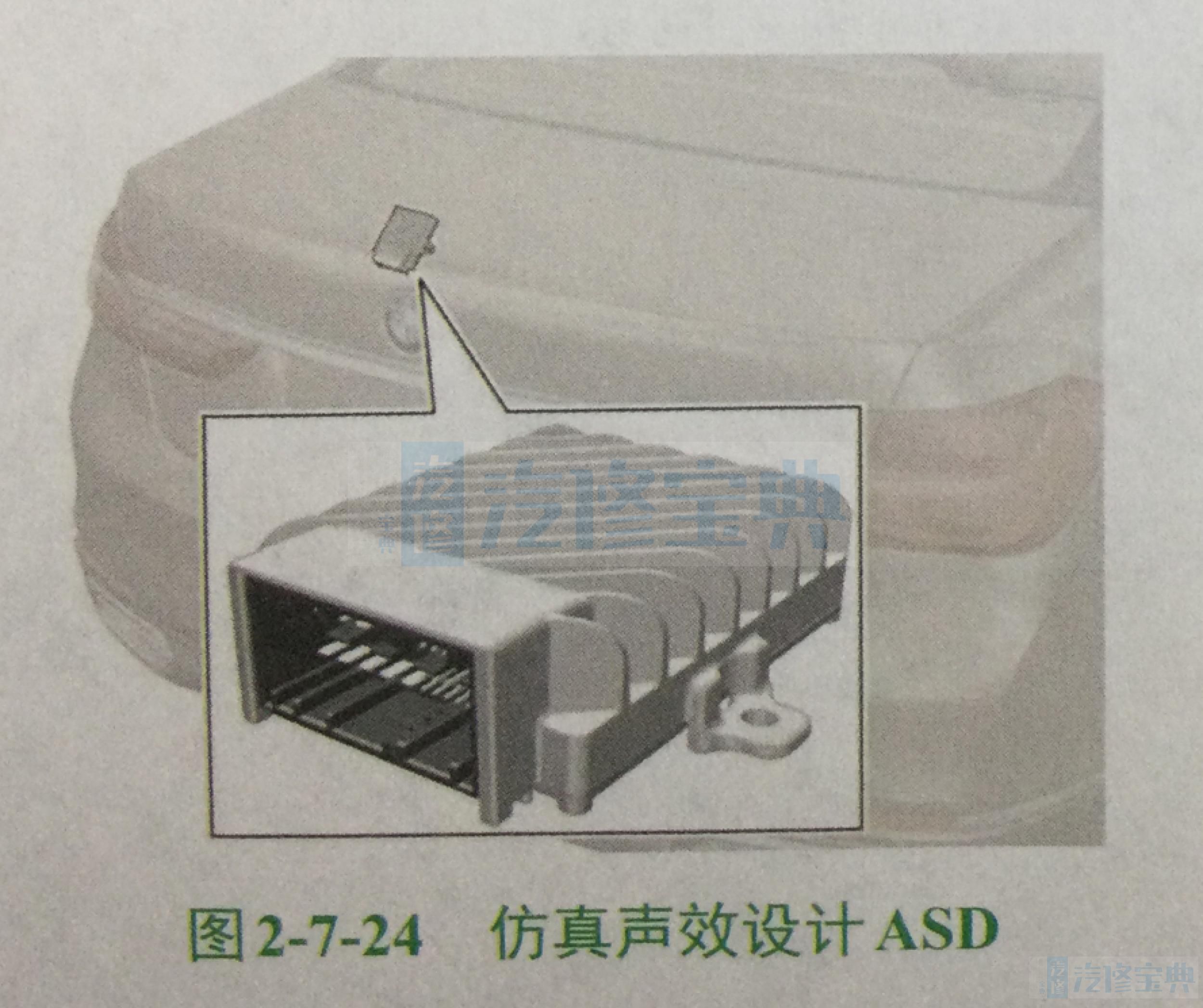
仿真声效设计ASD(图2-7-24)。仿真声效设计系统控制单元用于产生乘员区的发动机声响。在此根据声音设置编程、加速踏板角度(负荷要求)、发动机转速和扭矩等不同参数计算出发动机声响。之后通过车辆自身音响系统在乘员区输出。
控制器CON(图2-7-25)。在G11/G12上使用带触控板的控制器。客户可在触摸式操作面板上通过文字方式输入用于导航系统的地点信息或电话号码和联系人数据。进行地图操作时可通过例如移动手指来移动、扩大和缩小地图视图。
自动恒温空调IHKA(图2-7-26)。自动恒温空调是G11/G12的标准配置。
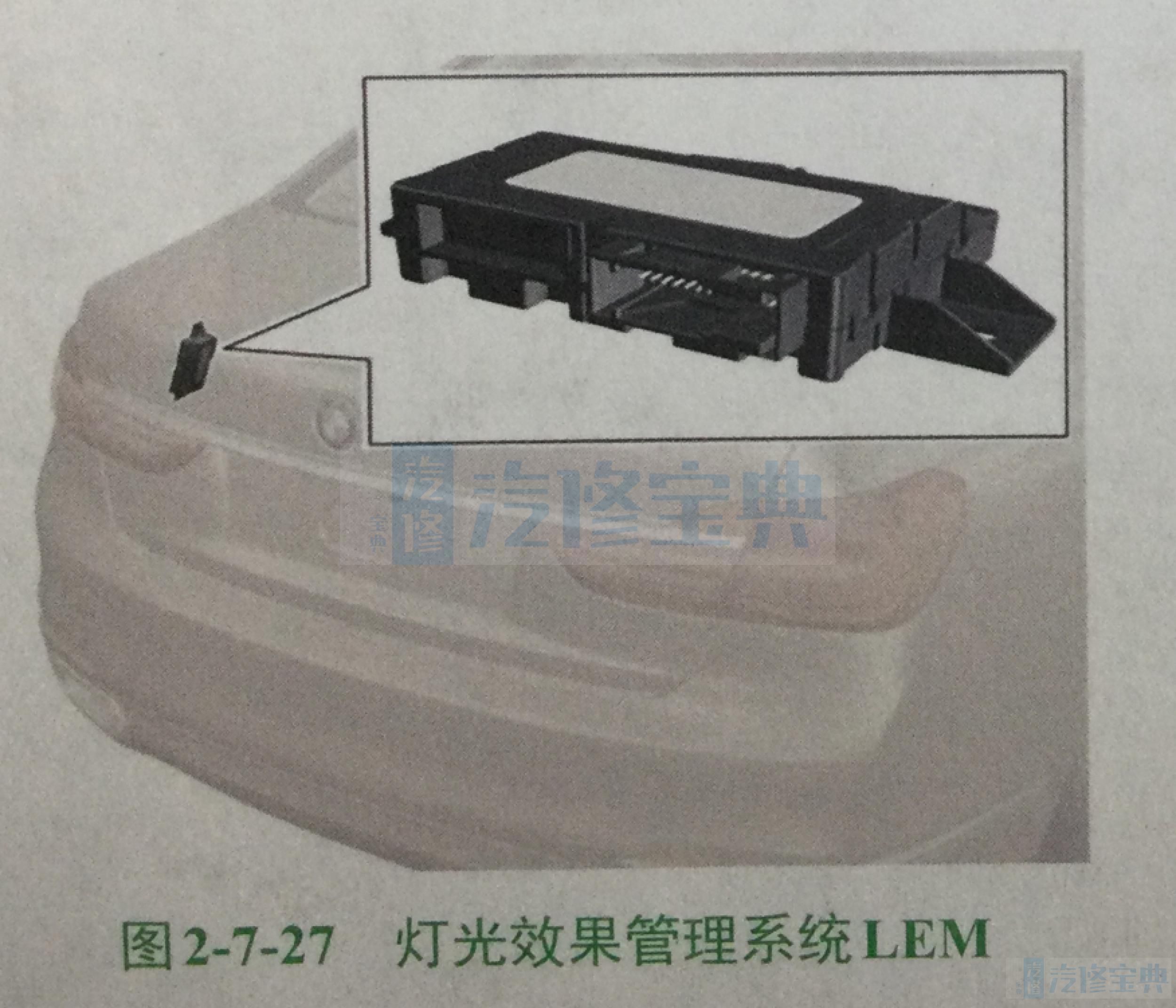
灯光效果管理系统LEM(图2-7-27)。
LEM控制单元负责控制以下照明装置:
a.全景天窗;
b.G12B柱内的光刃式B柱氛围灯;
C.高级音响系统的扬声器挡板。
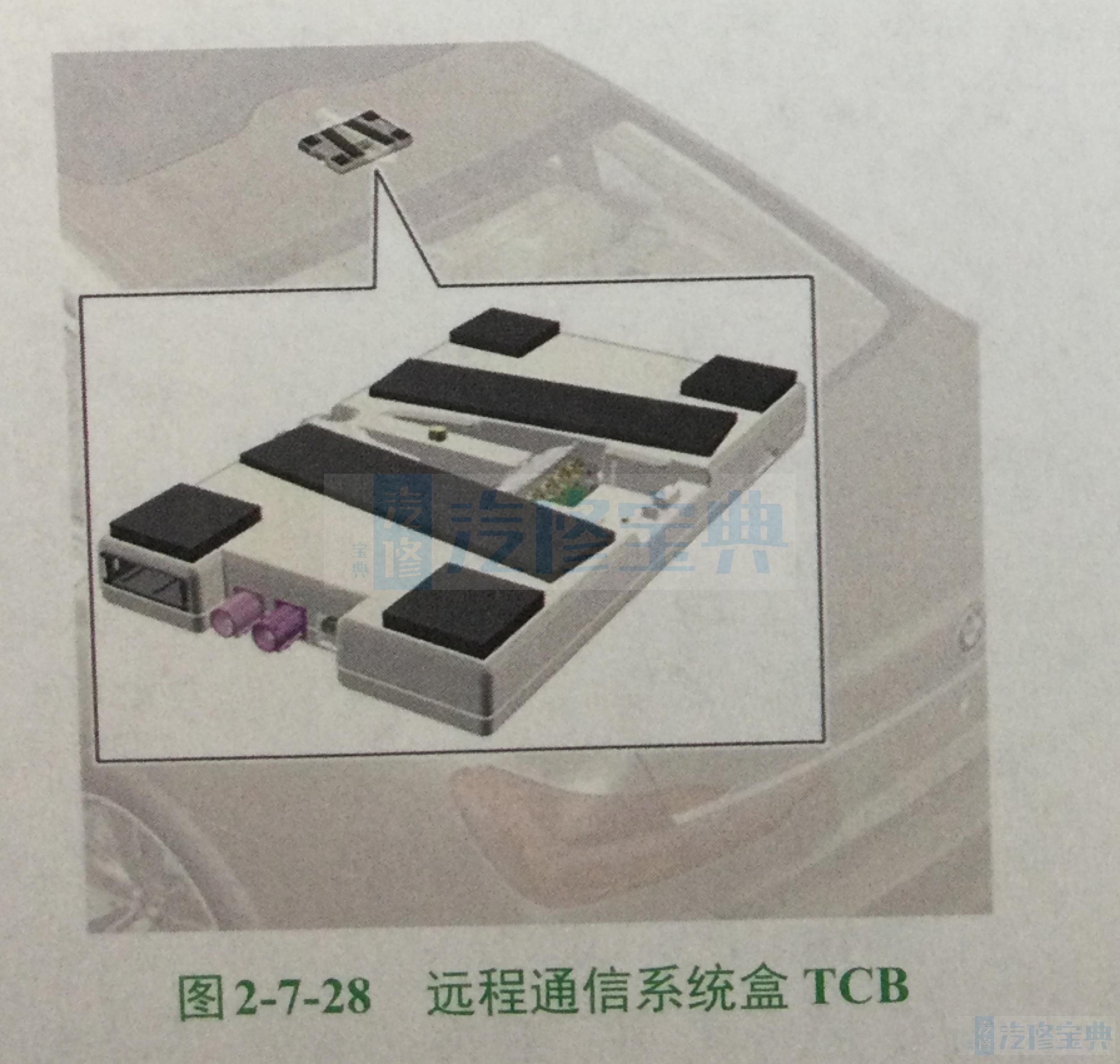
远程通信系统盒TCB(图2-7-28)。在G11/G12上安装第二代远程通信系统盒TCB。远程通信系统盒TCB直接与车顶天线连接,负责执行以下功能:
a.带 e call(紧急呼叫功能)的 BMW ASSist;
b. BMW Online;
c.通过一个集成在车上的SIM卡(P-SIM)实现 BMW Internet;
d.远程功能(接收和控制器);
e.办公方面的“语音转换文本”功能;
f通过P-SIM实现BMW远程售后服务。
(8)K-CAN5上的控制单元:
遥控信号接收器FBD(图2-7-29)。遥控信号接收器FBD控制单元负责进行远程操作服务通信。它也接收车轮电子装置数据用于轮胎压力监控系统。
宝马诊断系统ISTA不在总线概览内显示FBD控制单元,通过车身域控制器进行诊断。
近距离通信系统NFC(图2-7-30)。近距离通信系统NFC控制单元用于车内近距离通信。
宝马诊断系统ISTA不在总线概览内显示NFC控制单元,通过车身域控制器进行诊断。
③无线充电盒WCA(图2-7-31)。无线充电盒WCA控制单元监控充电支架并控制充电过程。
宝马诊断系统ISTA不在总线概览内显示WCA控制单元,通过车身域控制器进行诊断。
(9) PT-CAN上的控制单元:
①数字式发动机电子系统DME和DME2。图2-7-32中显示了DME和DME2控制单元。DME2控制单元位于左侧(沿行驶方向看)数字式发动机电子系统负责控制内燃机。此外数字式发动机电子系统还是PT-CAN与 PT-CAN2间的网关。
在四缸和六缸汽油发动机上安装DME控制单元。
在八缸和十二缸发动机上除DME外还安装DME2控制单元。
数字式柴油机电子系统DDE。数字式柴油机电子系统DDE负责控制柴油发动机。此外DDE还是 PT-CAN与 PT-CAN2间的网关。
远光灯辅助系统FLA(图2-7-33)。在不带基于摄像机的驾驶员辅助系统KAFAS的车辆上,远光灯辅助系统控制单元集成在车内后视镜内。在带有 KAFAS的车辆上,由基于摄像机的驾驶员辅助系统执行远光灯辅助系统功能。
④组合仪表 KOMBI(图2-7-34)。在G11/G12上,根据选装配置情况使用两种组合仪表型号:
a.带8.8 in TFT显示屏的基本型组合仪表(1in=2.54cm,下同);
b.带12.3 in TFT显示屏的高级型组合仪表。
⑤夜视系统电子装置NVE(图2-7-35)。夜视系统电子装置控制单元接收夜视摄像机的图像信息。在此通过FBAS将图像信息传输给 HUADUNIT,从而根据需要在CID内进行显示。
(10) PT-CAN2上的控制单元:
变速箱电子控制系统EGS(图2-7-36)。变速箱电子控制系统控制单元直接装在自动变速箱内。
选挡开关GwS(图2-7-37)。选挡开关GWS用于选择行驶挡位。
通过 PT-CAN2以及一个连接变速箱电子控制系统EGS的局域CAN进行总线连接。
电源控制单元PCU(图2-7-38)。电源控制单元用于:
a.为附加蓄电池充电;
b.从附加蓄电池为车载网络供电。
在电源控制单元PCU内有一个500W功率的DC/DC转换器。
能量管理系统调整条件由车辆使用情况所决定。发动机运行时,通过PCU为附加蓄电池充电。内燃机不运行(例如执行MSA关闭功能)期间,通过PCU从附加蓄电池为车载网络输送能量。
④选择性催化剂还原SCR(图2-7-39)。在柴油机车辆上,选择性催化剂还原SCR控制单元用于废气再处理。
(11)局域CAN上的控制单元:
雷达传感器(图2-7-40)。带有选装配置顶级行驶辅助系统SA5AT时,右侧雷达传感器RSR和左侧雷达传感器RSL的控制单元位于车辆右前侧和左前侧。
车道变更警告系统SWW2(副控单元)。
(参考图2-7-23)车道变更警告系统控制单元SWW2(副控单元)通过一个局域CAN与车道变更警告系统控制单元SWW(主控单元)连接,从而实现对BMW的系统诊断。