【例7-1】基于传感器融合的自适应巡航控制(ACC)系统仿真。 利用视觉传感器和毫米波雷达融合的自适应巡航控制系统具有以下优点。 ①它将视觉传感器获得的位置和速度的横向测量与毫米波雷达测量的距离和速度测量结合起来。 ②视觉传感器可以检测车道,提供车道相对于主车的横向位置估计,以及场景中其他车辆相对于主车车道的位置。 本实例介绍了如何使用传感器融合和基于模型预测控制(MPC)来实现汽车
自适应巡航控制系统仿真。
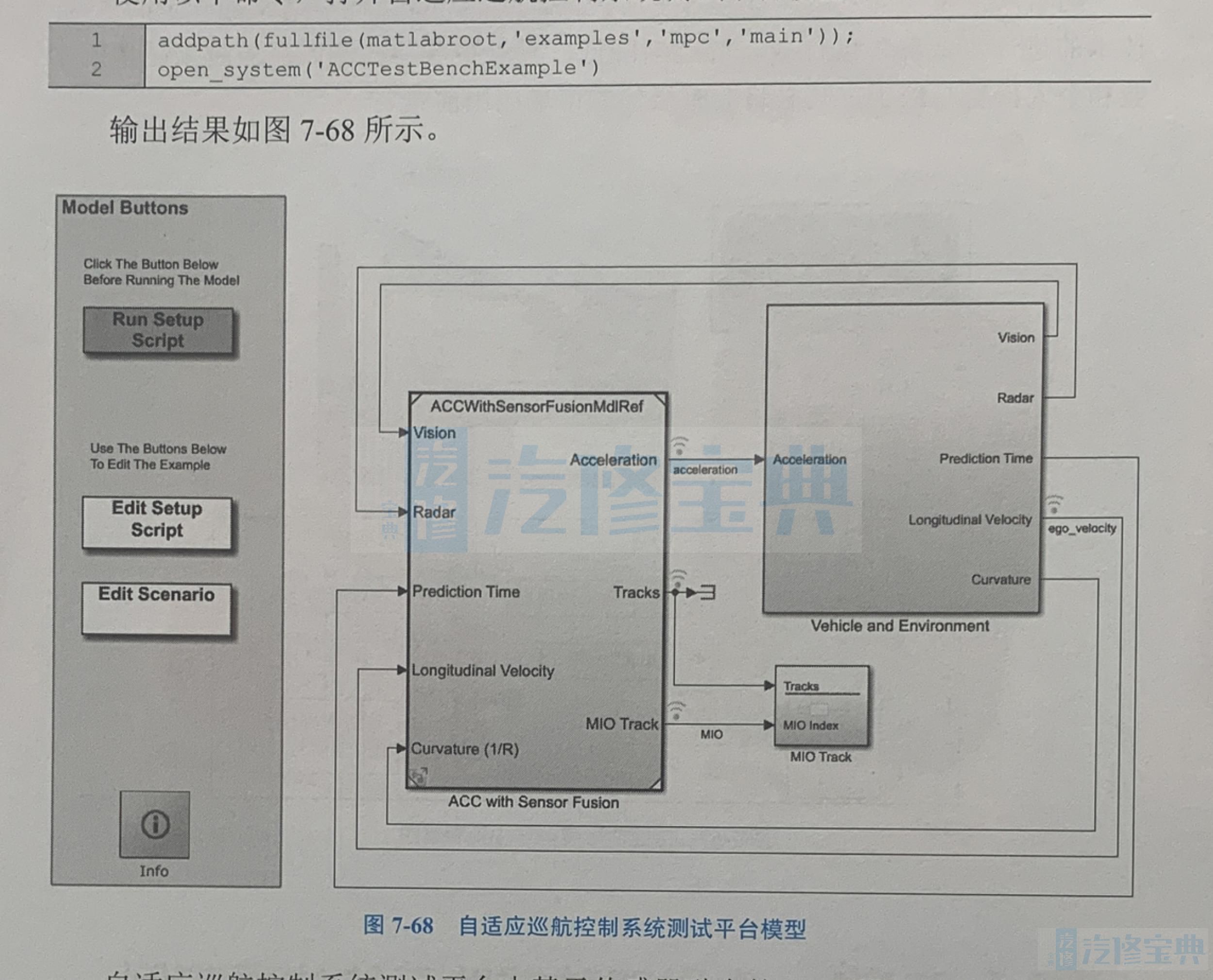
1.自适应巡航控制系统测试平台模型使用以下命令,打开自适应巡航控制系统测试平台模型。
自适应巡航控制系统测试平台由基于传感器融合的ACC模块、车辆与环境模块、模型按钮组成。
基于传感器融合的ACC模块模拟传感器融合并控制车辆的纵向加速度;车辆与环境模块对主车辆的运动和环境进行建模,毫米波雷达和视觉传感器为控制系统提供综合数据;模型按钮打开后,会显示初始化模型使用的数据脚本,该脚本加载 Simulink模型所需的某些常量,例如车辆模型参数、跟踪与传感器融合参数、ACC控制器参数、驾驶员转向控制参数、道路场景等。
(1)基于传感器融合的ACC模块 基于传感器融合的ACC模块如图7-69所示。
基于传感器融合的ACC模块又由跟踪与传感器融合和自适应巡航控制器模块组成。
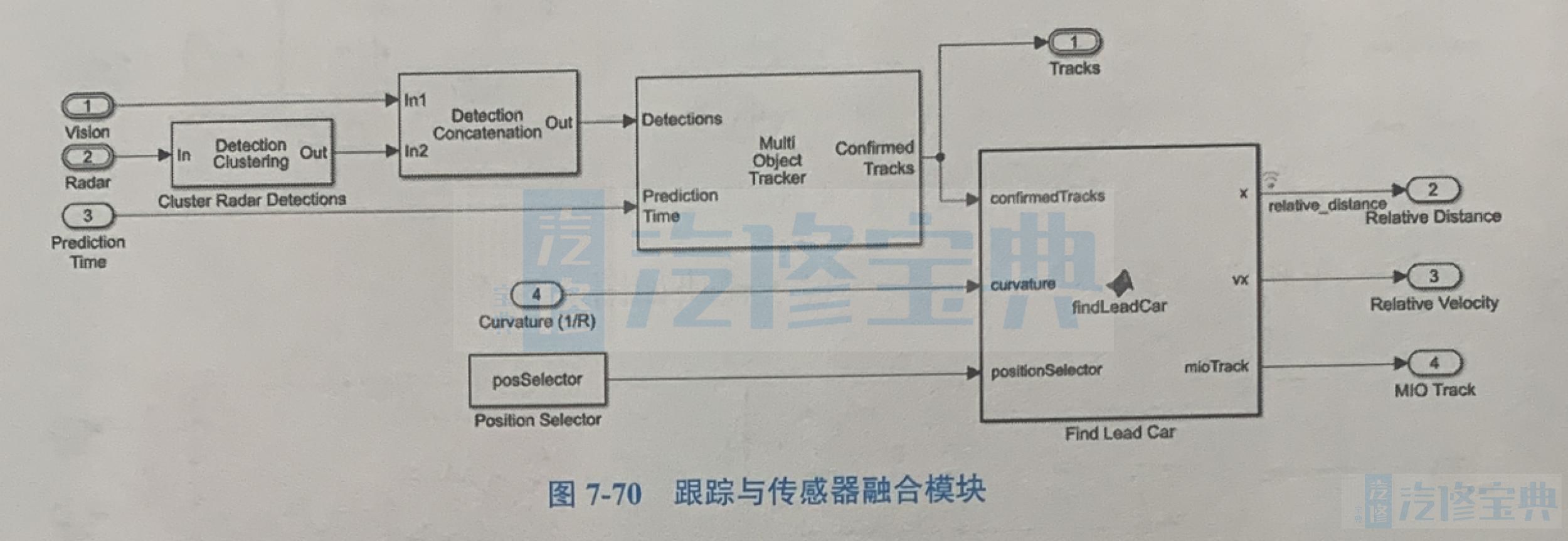
①跟踪与传感器融合模块如图7-70所示,它处理来自车辆与环境模块的视觉传感器和毫米波雷达的检测,生成主车周围环境的综合态势图。此外,它还向ACC提供主车前方车道上最近的车辆的估计值。
跟踪与传感器融合模块主要由多目标跟踪模块、检测连接模块、检测聚类模块、寻找引导车辆模块组成。多目标跟踪模块的输入的是所有传感器检测的组合列表和预测时间,输出的是已确认轨迹的列表;检测连接模块将视觉传感器和雷达检测连接起来,预测时间由车辆和环境子系统中的时钟驱动;检测聚类模块将多个雷达检测进行聚类,因为跟踪器要求每个传感器对每个目标至多进行一次检测;寻找引导车辆模块使用己确认的轨道列表和道路曲率来查找哪个车辆最接近主车,并在同一车道上位于主车前面,这辆车被称为引导车。当车辆驶入和驶出主车前方的车道时,引导车可能会发生变化。该模块提供了引导车相对于主车的位置和速度,以及最重要物体的轨迹。
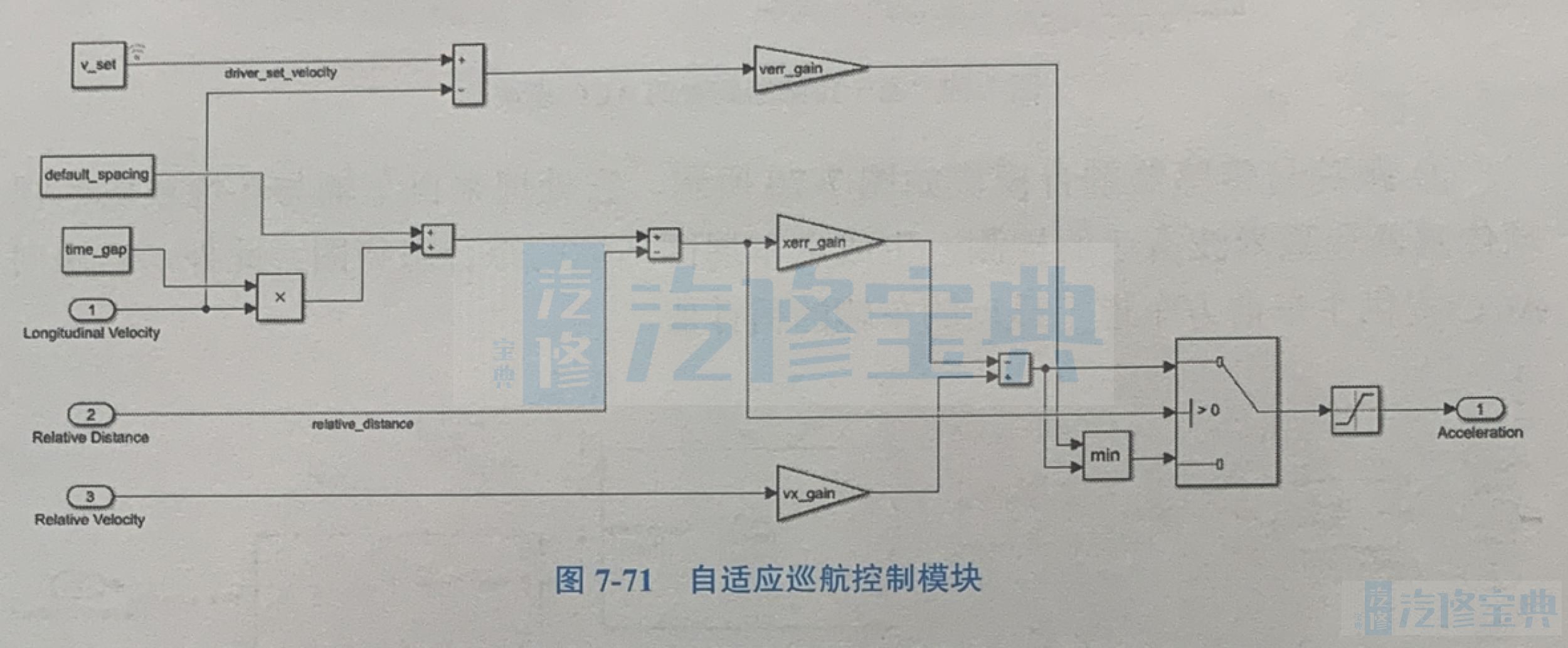
②自适应巡航控制器有两种:经典设计(默认)和基于MPC的设计。两种设计均采用以下设计原则。装备ACC的车辆(主车)使用传感器融合来估计与引导车的相对距离和相对速度。ACC使主车以驾驶员设定的速度行驶,同时保持与引导车的安全距离。
ACC基于以下输入为主车生成纵向加速度:汽车纵向速度;来自跟踪与传感器融合系统的引导车与主车的相对距离;来自跟踪与传感器融合系统的引导车与主车的相对速度。
在经典的ACC设计中,如果相对距离小于安全距离,则首要目标是减速并保持安全距离;如果相对距离大于安全距离,则主要目标是在保持安全距离的同时达到驾驶员设定的速度。这些设计原则是通过最小和开关模块实现的。
自适应巡航控制模块如图7-71所示。
(2)车辆与环境模块车辆与环境子模块如图7-72所示。
车辆与环境子模块又由车辆动力学、对象和传感器模拟、驾驶员转向模块组成。
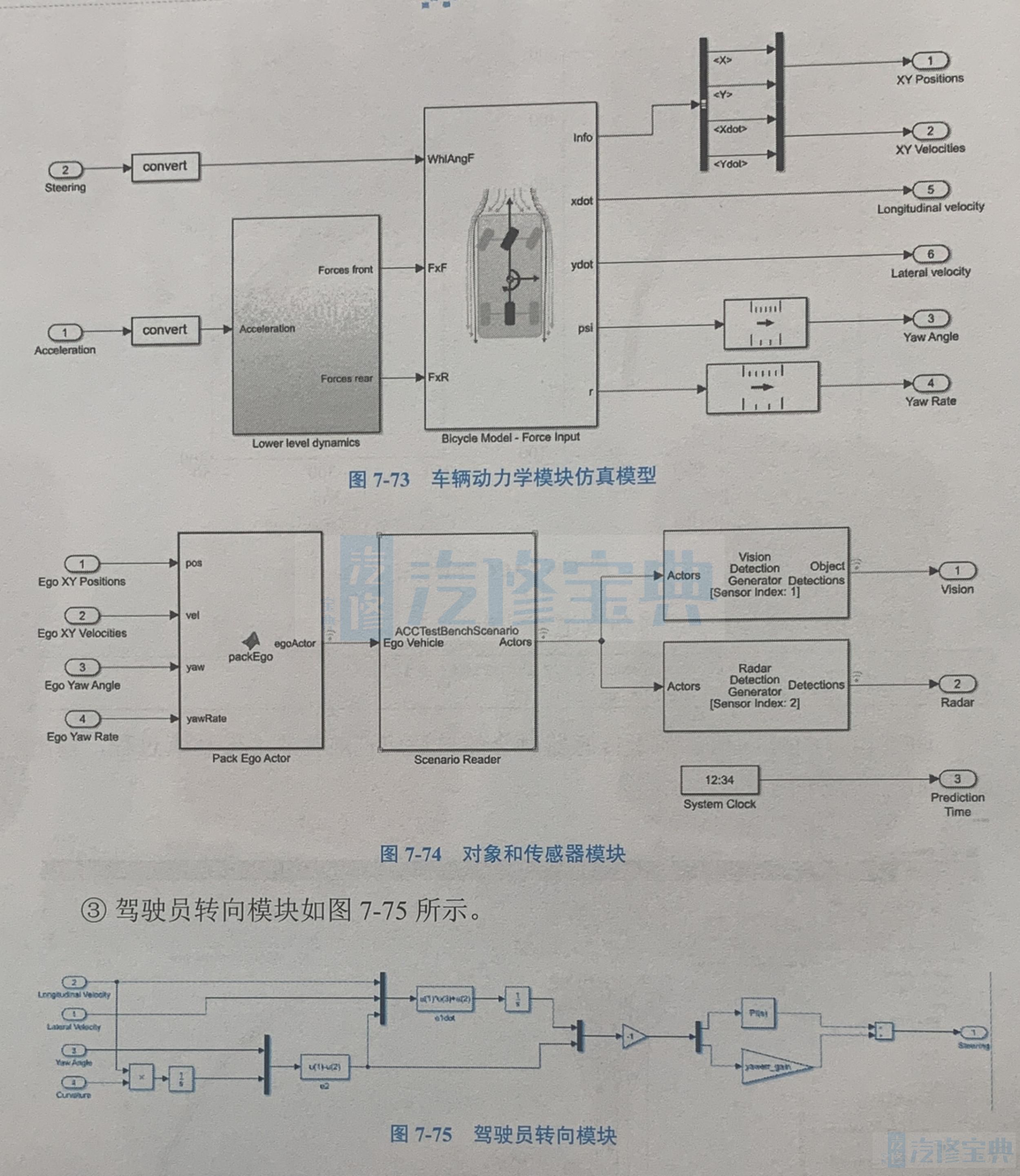
①车辆动力学模块利用自动驾驶工具箱中的单轨汽车模型力输入模块对车辆动力学进行建模。车辆动力学模块如图7-73所示。
②对象和传感器模块生成跟踪和传感器融合所需的数据。在运行此示例之前,驱动场景设计器应用程序用于创建一个场景,其中有一条弯曲的道路,多个对象在道路上移动。对象和传感器模块仿真模型如图7-74所示。
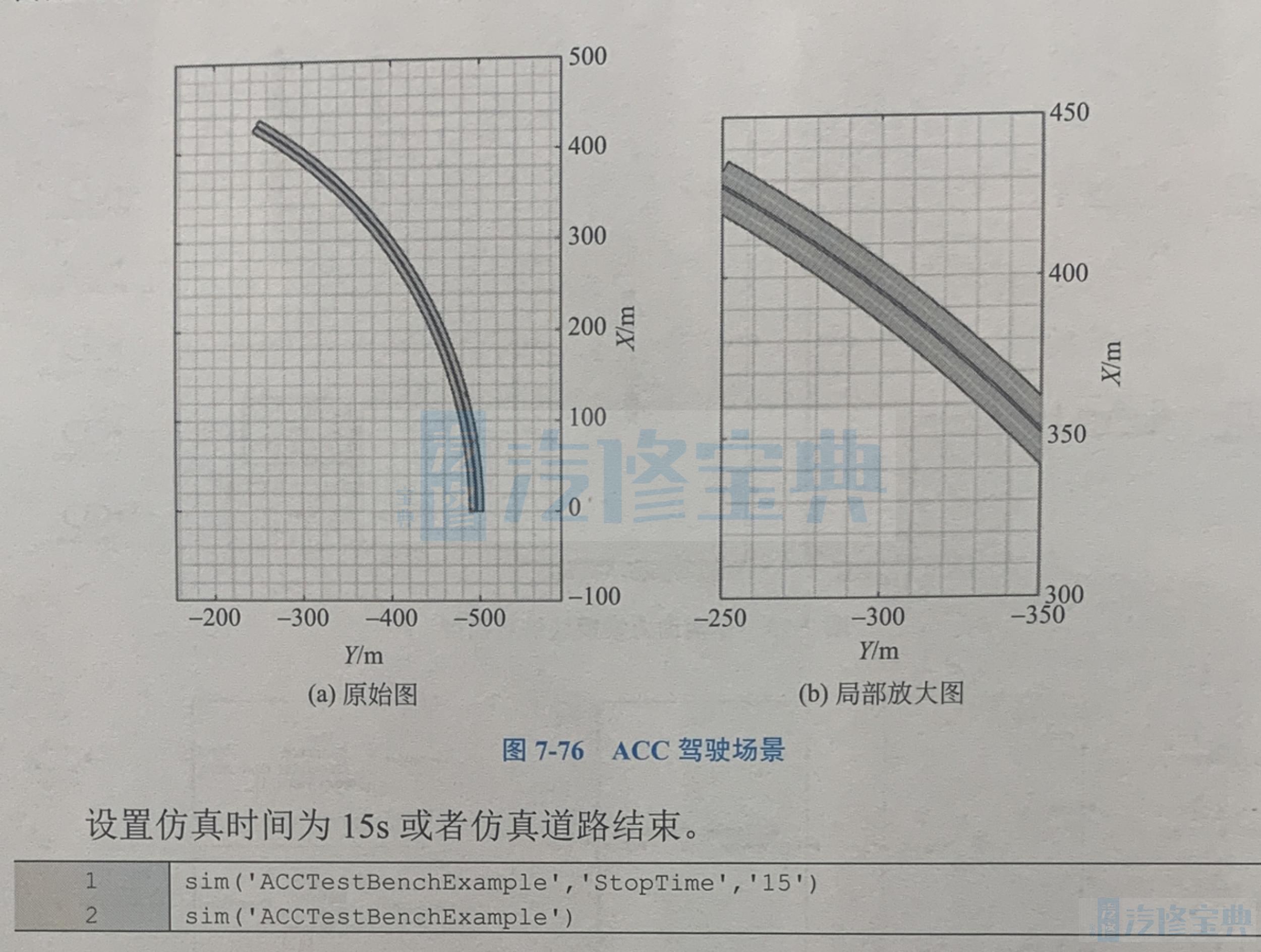
2.自适应巡航控制系统仿真本实例驾驶场景是两条具有恒定曲率的平行道路。车道上有四辆车:一辆在左边车道上的快车;一辆在右边车道上的慢车;一辆从道路对面驶来的车;以及辆从右边车道上起步,然后向左边车道行驶的车,以通过慢车。
可以绘制ACC驾驶场景plotACCScenario输出结果如图7-76所示。
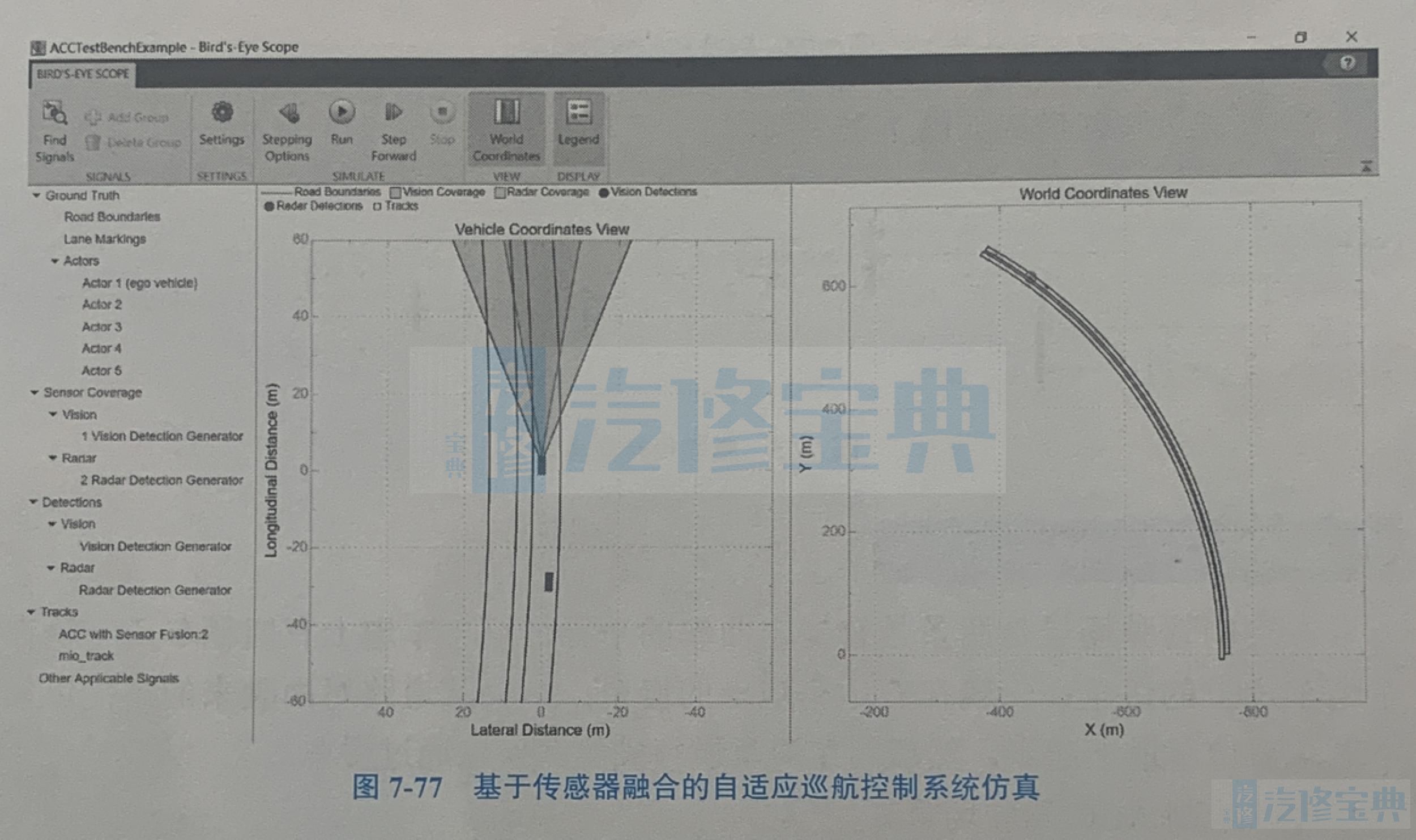
通过鸟瞰图可以观察基于传感器融合的自适应巡航控制系统仿真过程,输出结果如图7-77所示。
3.更改仿真条件方法利用自适应巡航控制系统测试平台模型,可以彷真任意的自适应巡航控制
系统。
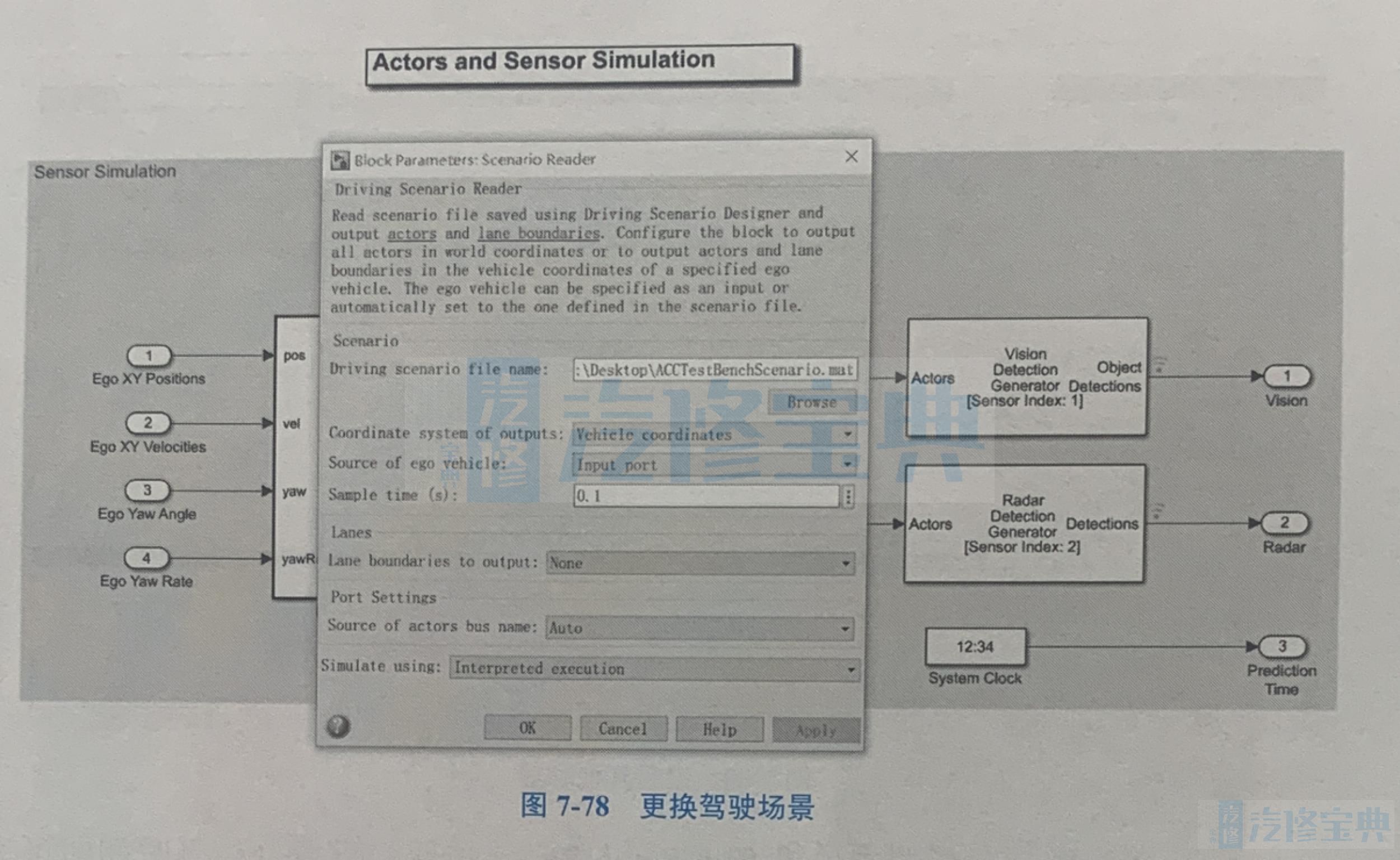
(1)更换驾驶场景驾驶场景可自行设计。双击模型中的 Vehicle and Environment子系统,再双击 Actors and Sensor Simulation子系统,然后双击 Scenario reader模块,如图7-78所示。
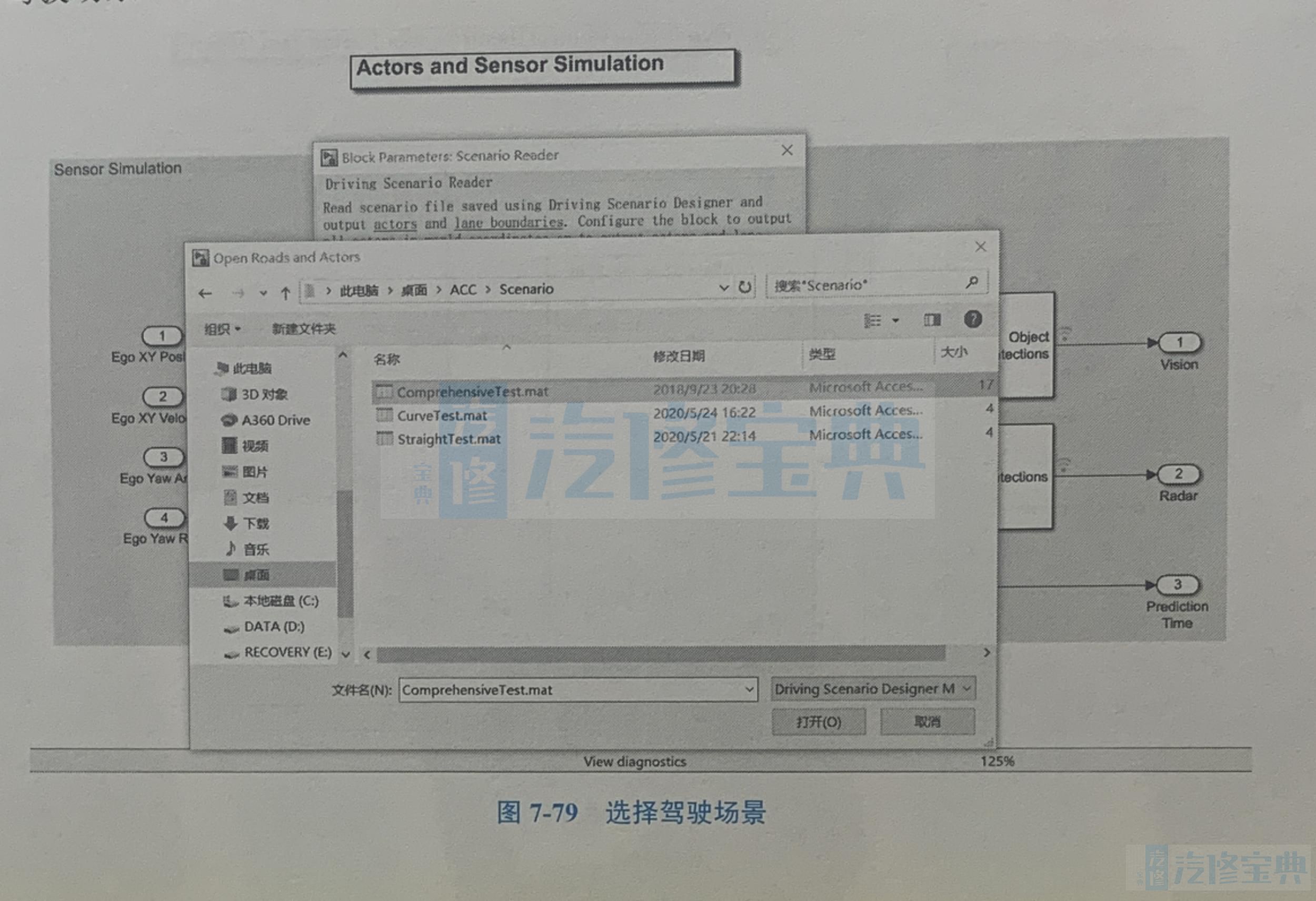
在窗口中的 Driving scenario file name中点击 Browse,打开ACC文件夹中的驾驶场景( Scenario)子文件夹,然后选择所需要的驾驶场景文件,如图7-79所示。
点击窗口中的 Apply即可完成驾驶场景的更换。
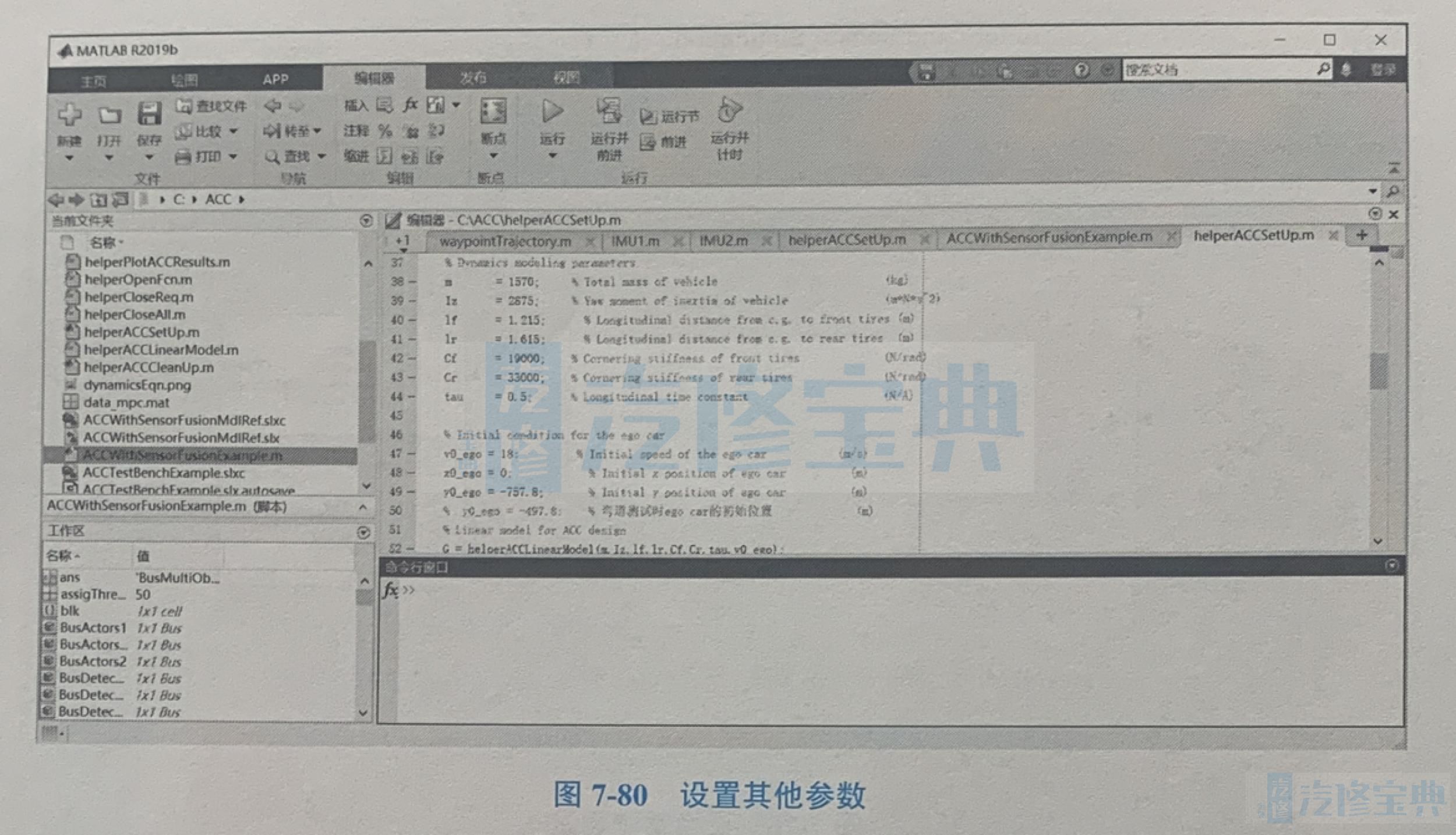
2)设置其他参数在模型中单击 Edit Setup Script按钮,进入 setup脚本文件可以对ACC系统的各个参数进行设置,如车辆参数、传感器参数、控制器参数、初始车速等,如图7-80所示。
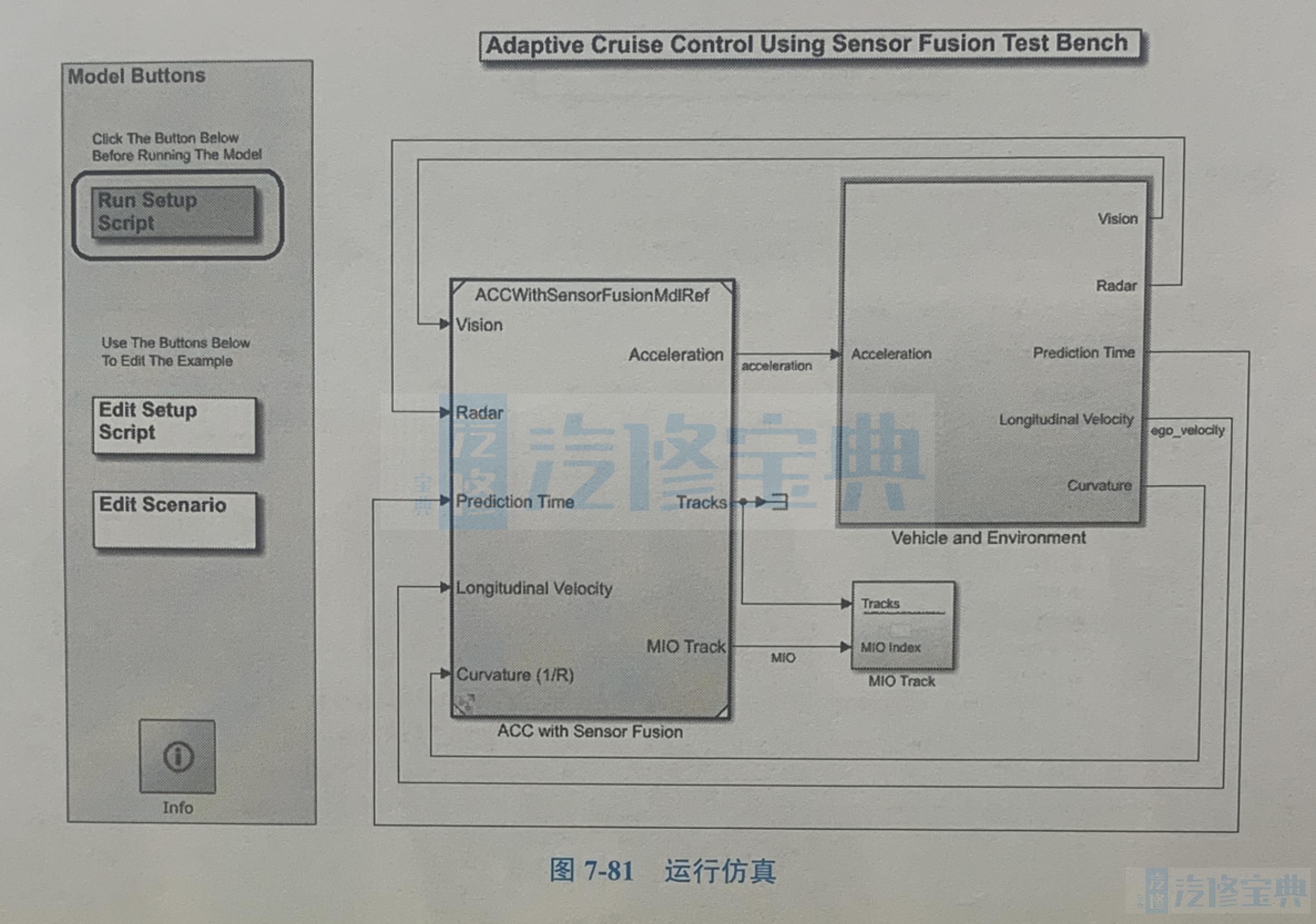
(3)运行仿真在模型中单机 Run Setup Script按钮,设置好仿真时间即可运行仿真,如图7-81所示。
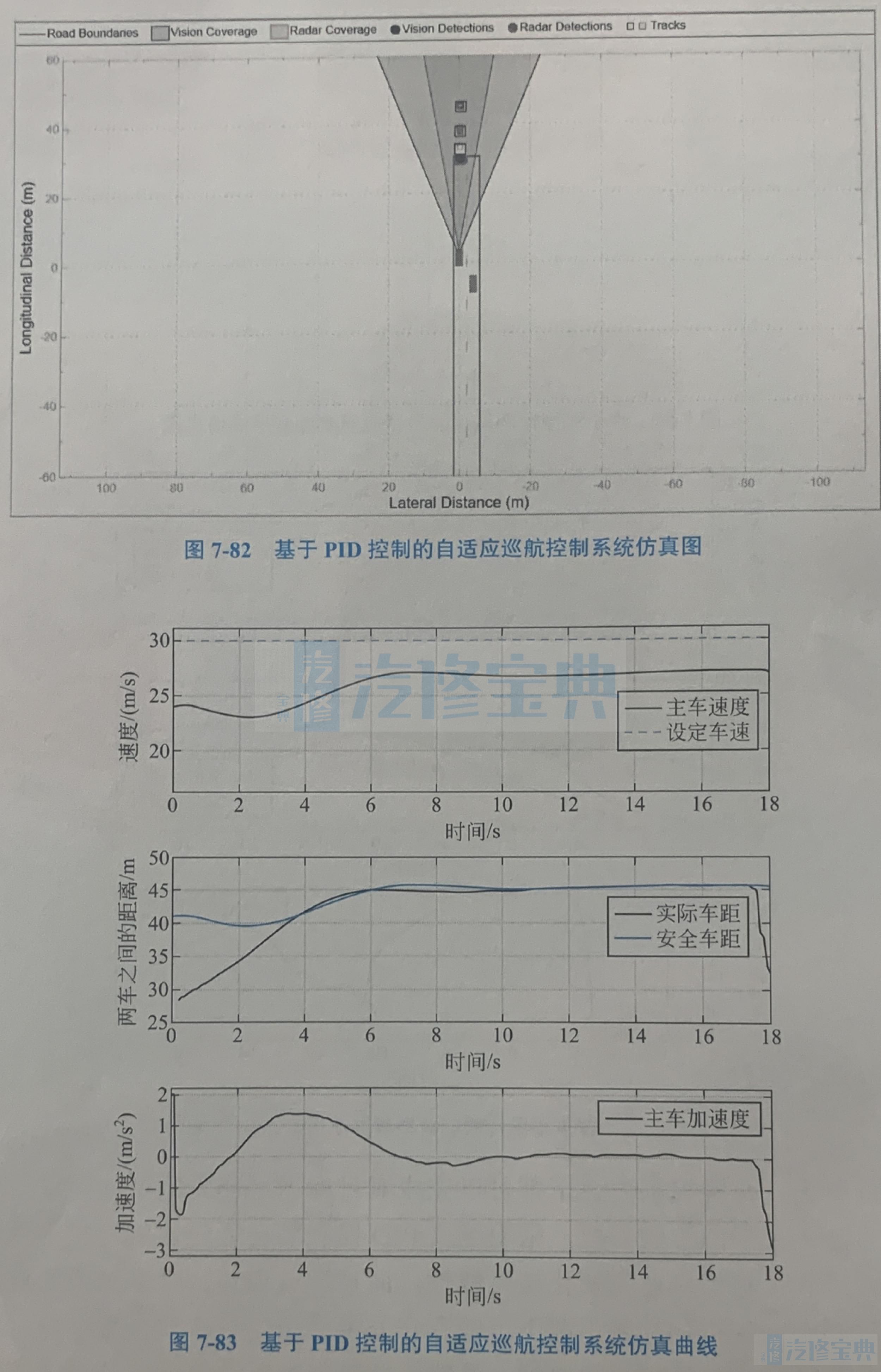
图7-82所示为基于PID控制的自适应巡航控制系统仿真图;图7-83所示为基于PID控制的自适应巡航控制系统仿真曲线。
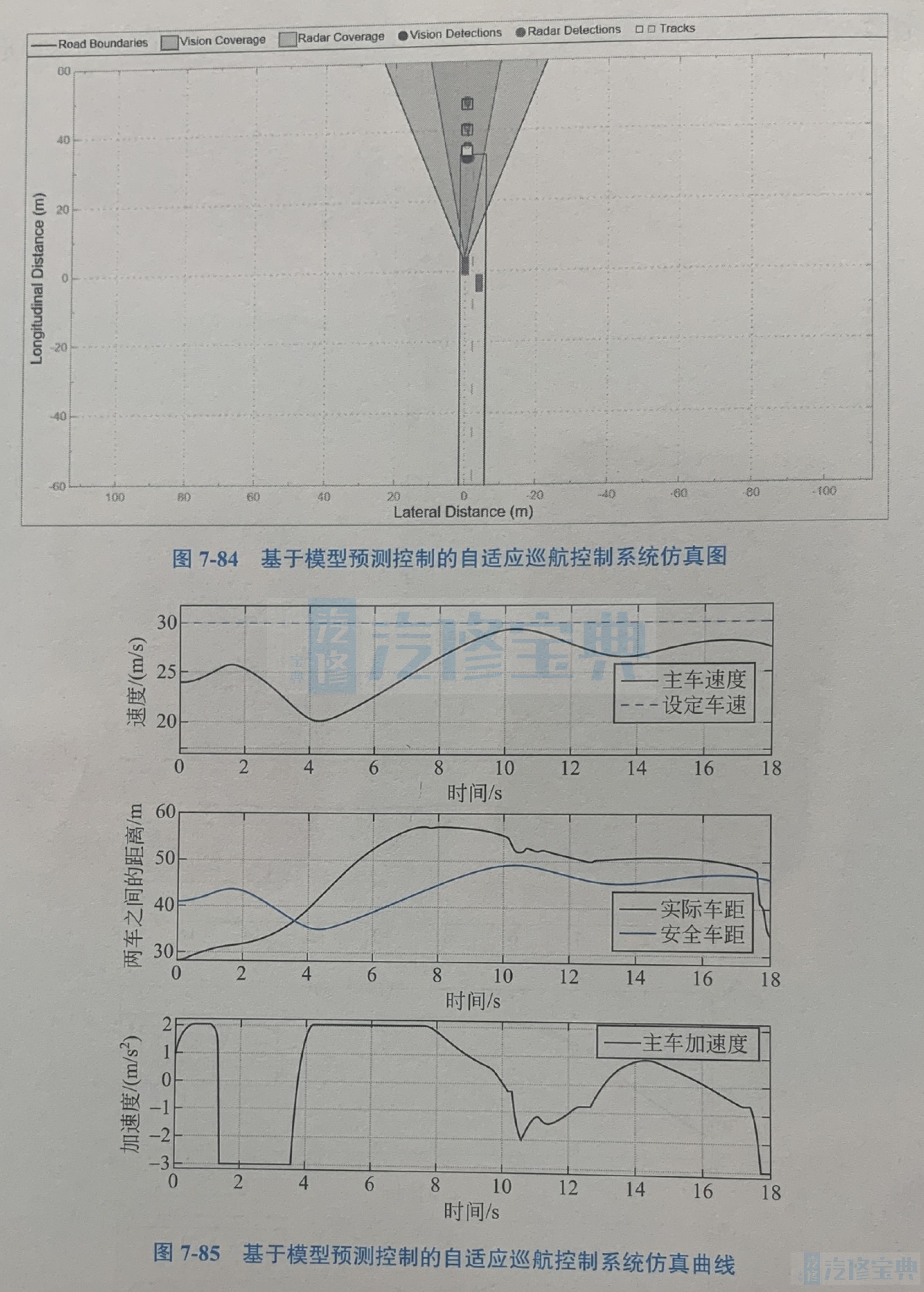
图7-84所示为基于模型预测控制的自适应巡航控制系统仿真图;图7-85所示为基于模型预测控制的自适应巡航控制系统仿真曲线。
可以看出,两种控制方式下都可以完成对目标识别能力测试的要求。分析两种控制方法下主车的行驶参数,采用经典PID控制的自适应巡航控制系统在速度控制中,表现得更好;速度变化接近线性,而且比较稳定,乘坐舒适性良好;但在距离控制中,在实际行驶工况下可能存在安全隐患,行车安全性一般,需要进行优化。采用基于模型预测的控制,虽然速度控制不如经典PID切换式控制那样稳定,但是距离控制良好;能保证一定的行车安全性,但是需要优化速度控制,提高乘坐舒适性。