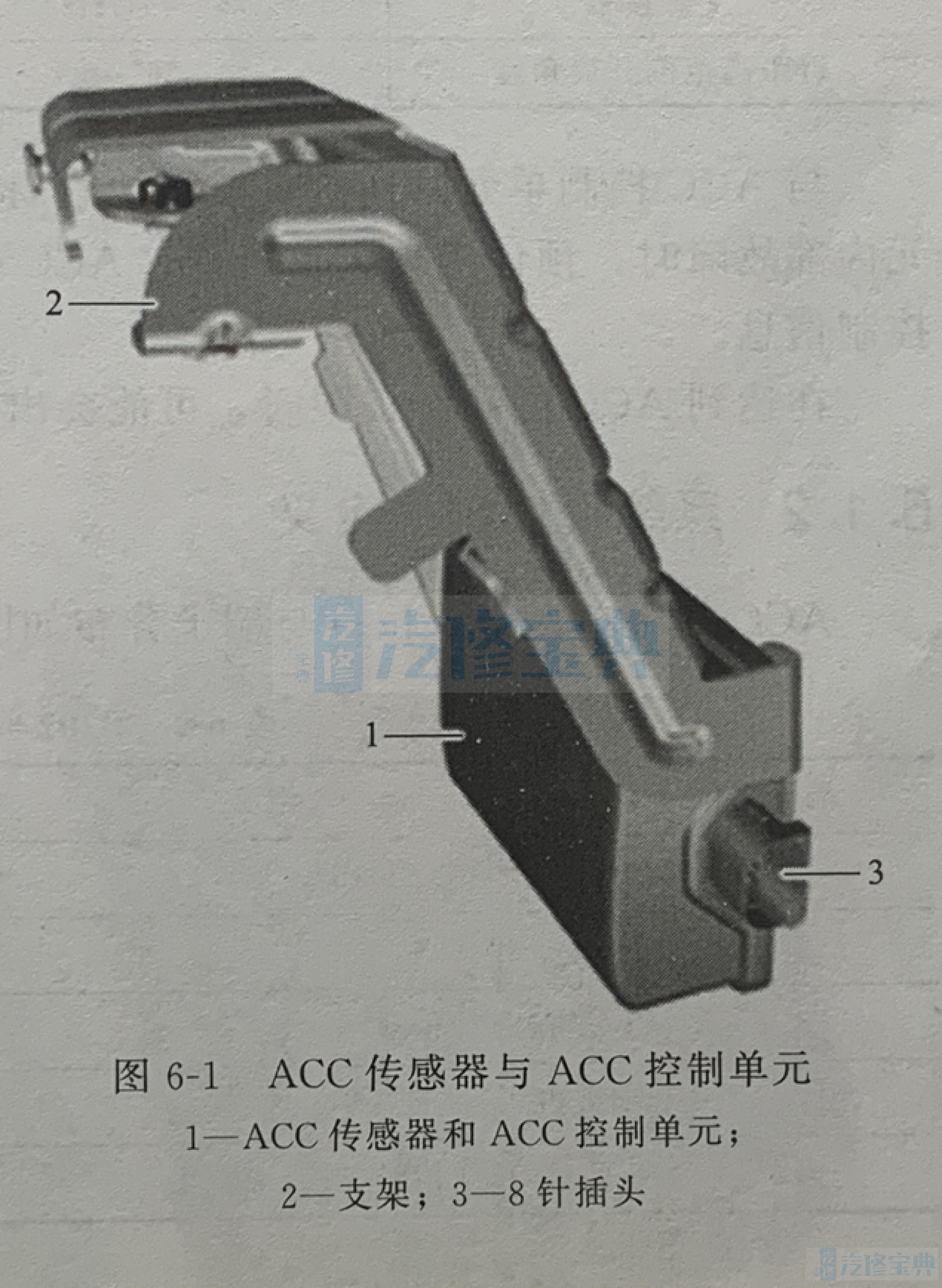
自适应巡航控制系统(ACC, Active cruise control)的新型传感器取代了之前使用的远距离传感器和两个近距离传感器。 ACC传感器和ACC控制单元是一个部件。这个部件位于前挡板一个可拆卸的格栅后面。 作为已知自适应定速控制的补充,该系统具有启停功能:通过发动机或制动干预进行距离控制和定速控制,直至进入静止状态。在短暂的停车(1~3)后,从静止状态中自动启动自适应制动辅助系统。 设置速度可以在30~180km/h的范围内进行选择:在舒适模式下以10km/h为步进值或在精细模式下以1km/h为步进值。设置速度将在组合仪表中显示出来(也可以通过平视显示系统)。此外能够在四种距离之间进行选择ACC传感器集成在ACC控制单元中,如图6-1所示。ACC传感器是一个雷达传感器,负责车辆前的远距离(200m)测量和近距离(60m)测量。 ICM(一体式底盘管理系统)控制单元为带有停停走走功能的自适应巡航控制系统承担下列任务:汇总雷达传感器传送的目标数据;分析目标并选择与定距控制相关的目标;分析操作信号并生成显示信号;调节速度和距离;生成标准值并通过 FlexRay输出到驱动装置和制动器执行器;监控所有输入信号、控制单元(硬件)以及车辆状态是否有故障或不可信的状态ACC控制单元通过一体式底盘管理系统(ICM)与S-CAN(传感器CAN)连接。传感器CAN以500Kbit/s的传输率工作。传感器CAN
具有两个均为120Ω的终端电阻,其中一个位于CM中,另一个集成在ACC控制单元中。
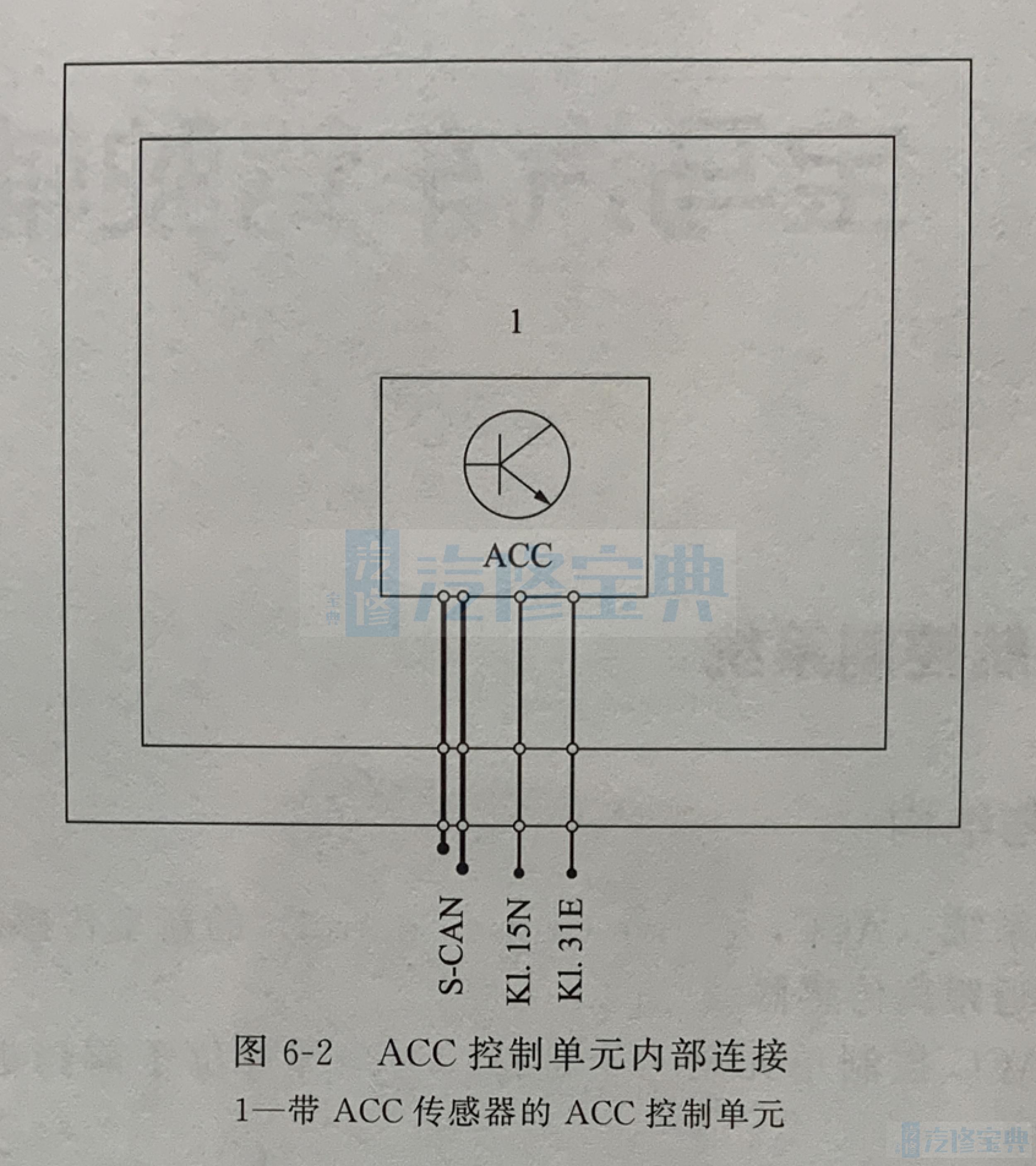
前部配电器通过总线端K1.15N为ACC控制单元供电。ACC控制单元内部连接如图6-2所示。
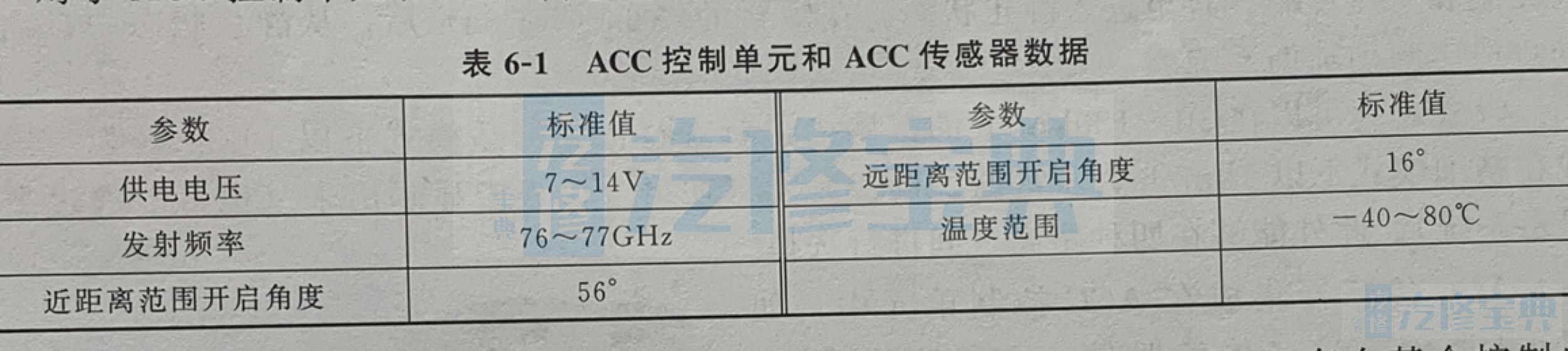
对于ACC控制单元和ACC传感器需要注意表6-1中所列标准值。
与ACC控制单元的通信失灵时执行标准检测程序(通用检测过程)。存在某个控制单元内部故障时,预计出现以下情况:ACC控制单元中出现故障记录;组合仪表上出现检查控制信息。
在达到ACC的功能极限时,可能会出现驾驶员不能理解的系统状态。