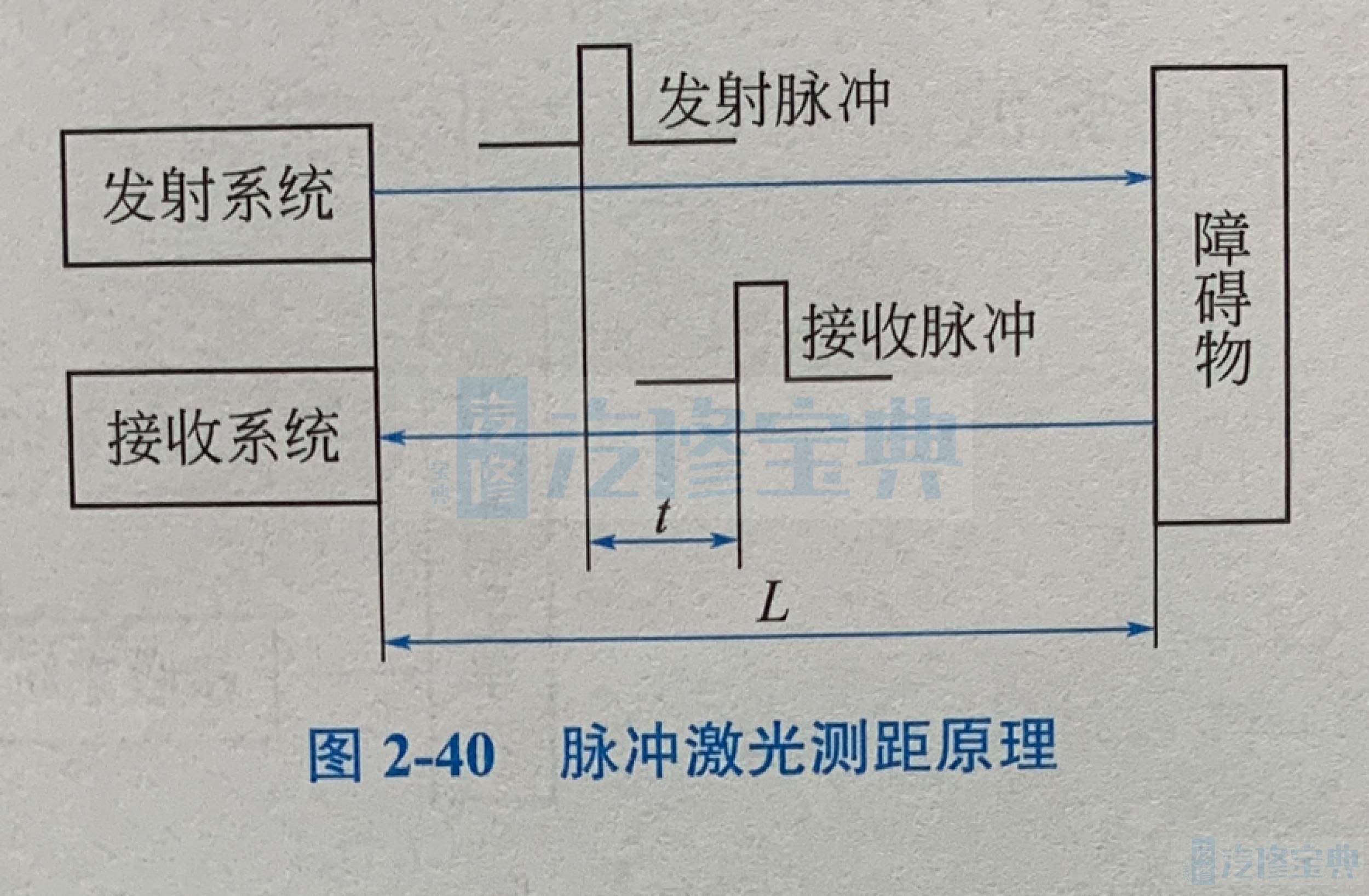
激光雷达测距的基本原理是通过测算激光发射信号与激光回波信号的往返时间,从而计算出目标的距离。首先,激光雷达发出激光束,激光束碰到障碍物后被反射回来,被激光接收系统进行接收和处理,从而得知激光从发射至被反射回来并接收之间的时间,即激光的飞行时间,根据飞行时间,可以计算出障碍物的距离。 根据所发射激光信号的不同形式,激光测距方式可分为脉冲激光测距和连续波相位激光测距两大类。目前,主要用到的测距方法有脉冲测距法、干涉测距法和相位测距法等。 1.脉冲测距法用脉冲法测量距离时,激光器首先发出一个光脉冲,同时设定的计数器开始计数,当接收系统接收到经过障碍物反射回来的光脉冲时停止计数。计数器所记
射功率较高,一般从几瓦到几十瓦不等,最大射程可达几十千米。脉冲激光测距的关键之一是对激光飞行时间的精确测量。激光脉冲测量的精度和分辨率与发射信号带宽或处理后的脉冲宽度有关,脉冲越窄,性能越好。
2.干涉测距法干涉测距法的基本原理是利用光波的干涉特性实现距离的测量。根据干涉原理,产生干涉现象的条件是两列有相同频率、
相同振动方向的光相互叠加,并且这两列光的相位差固定。
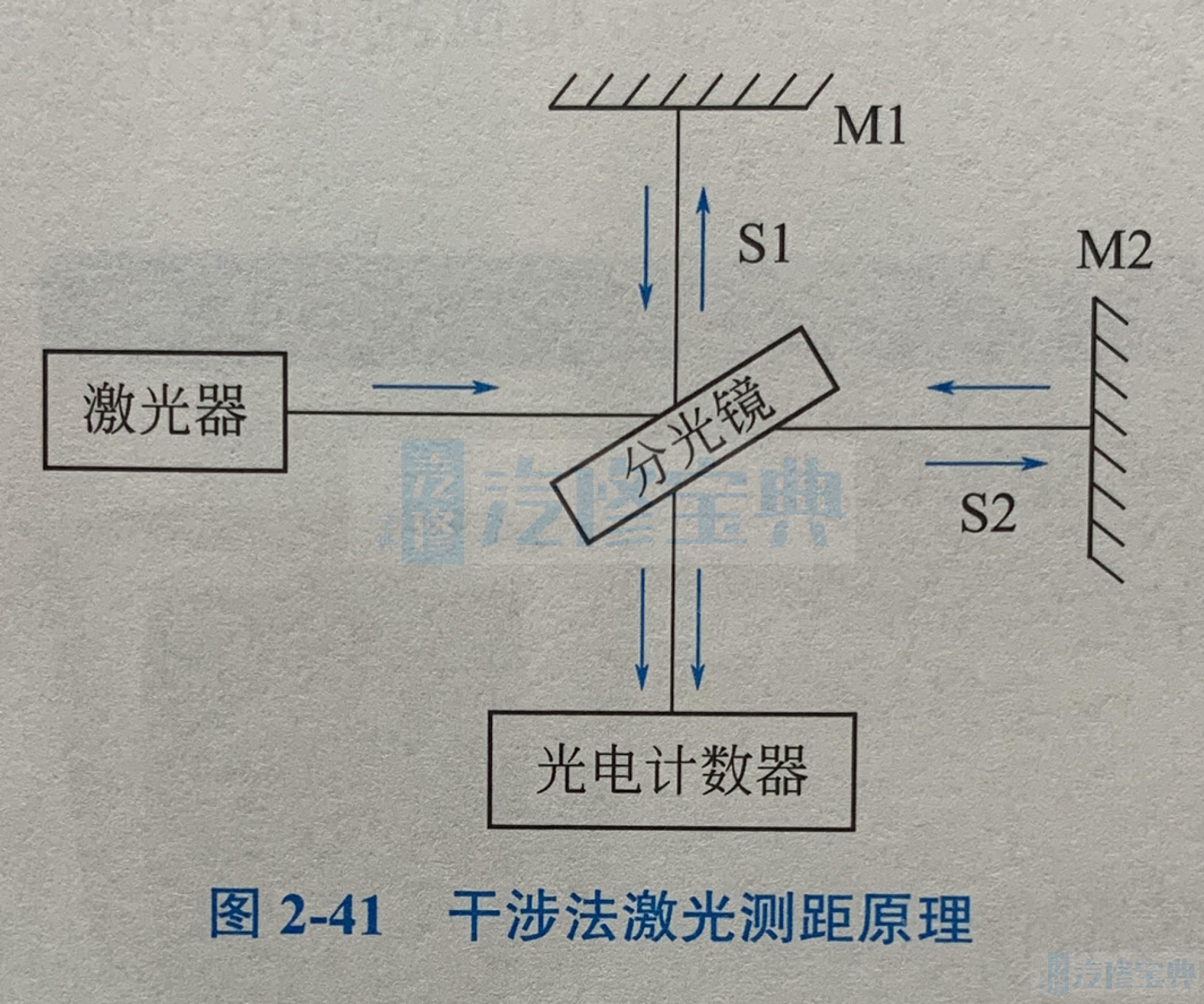
干涉测距法原理如图2-41所示,激光器发射出一束激光,通过分光镜分为两束相干光波S1和S2,两束光波各自经过反射镜M1和M2反射回来,在分光镜处又汇合到一起。由于两束光波的路程差不同,通过干涉后形成的明暗条纹也不同,所以传感器将干涉条纹转换为电
信号之后,就可以实现测距功能干涉法测距技术虽然已经很成熟,并且测量精度也很好,但是它一般是用在测量距离的变化中,不能直接用它测量距离,所以干涉测距一般应用于干涉仪、测振仪、陀螺仪中。
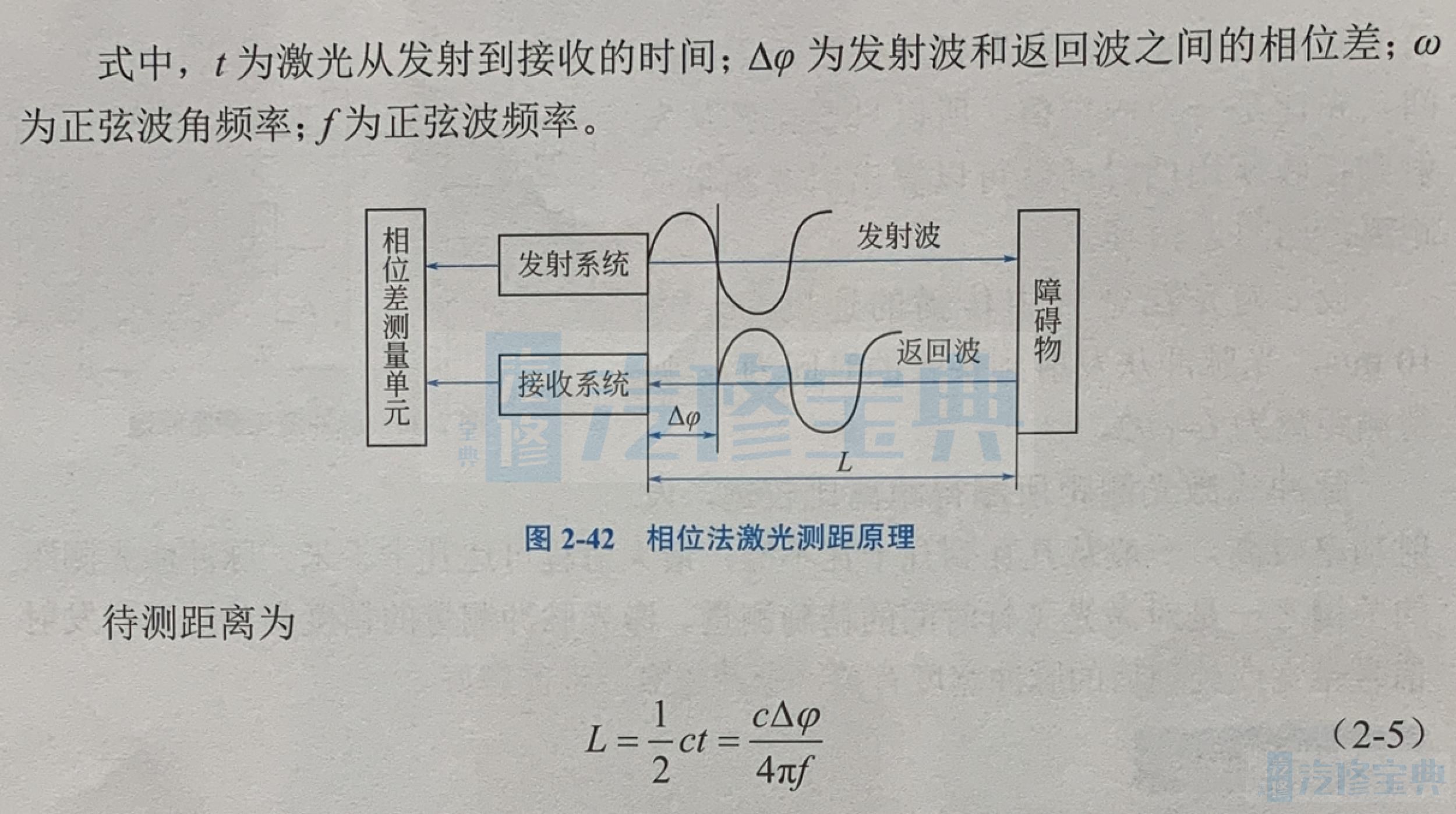
3.相位测距法相位测距法的原理是利用发射波和返回波之间所形成的相位差来测量距离的首先,经过调制的频率通过发射系统发出一个正弦波的光束,然后,通过接收系统接收经障碍物反射回来的激光。只要求出这两束光波之间的相位差,便可通过此相位差计算出待测距离。相位法激光测距原理如图2-42所示。
激光从发射到接收的时间为
相位测距法由于其精度高、体积小、结构简单、昼夜可用的优点,被公认为是最有发展潜力的距离测量技术。相比于其他类型的测距方法,相位测距法朝着小型化、高稳定性、方便与其他仪器集成的方向发展。