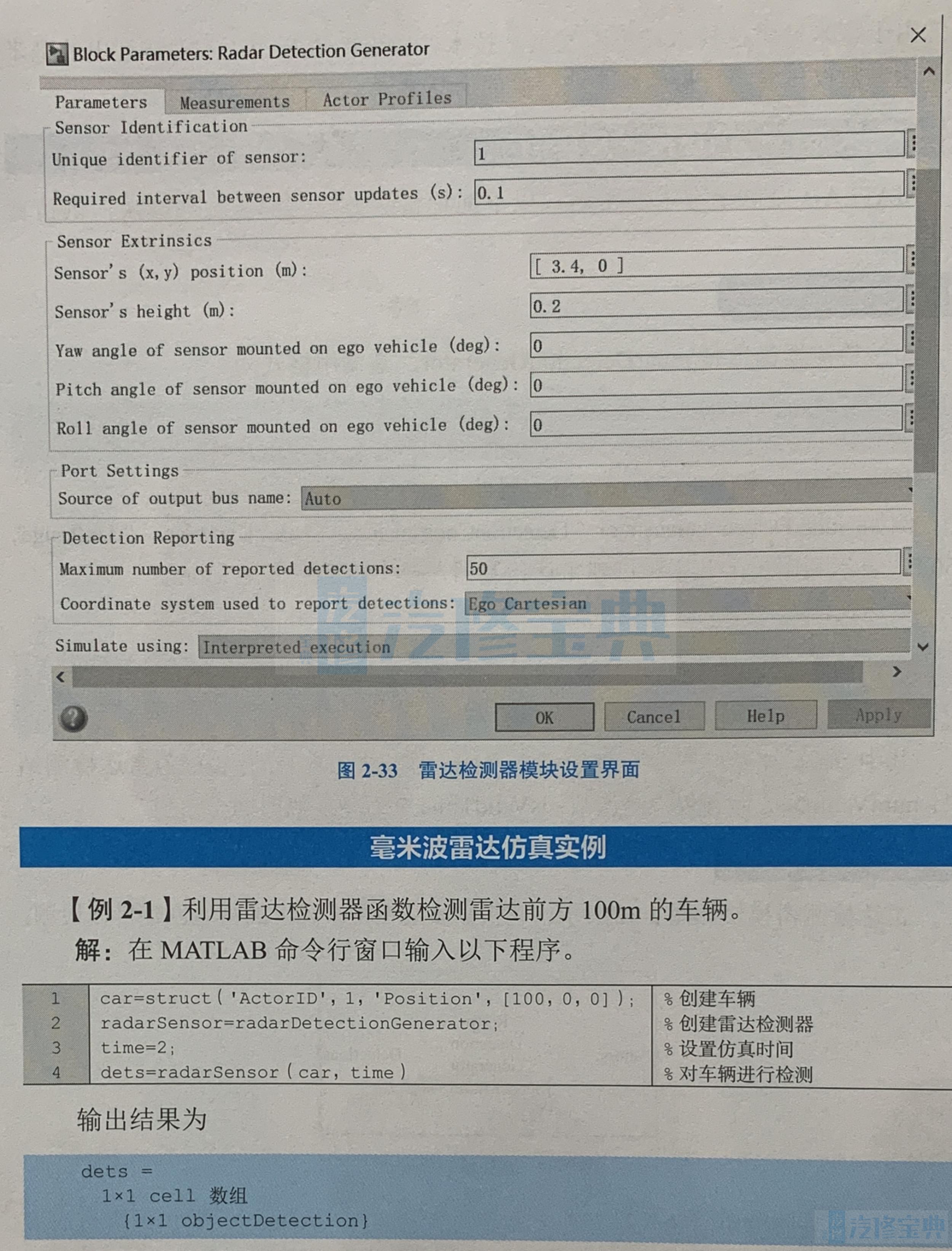
雷达检测器模块的输入是其他交通参与者的姿态( Actors);输出是雷达的检测信号( Detections)。
点击雷达检测器模块,进入雷达检测器模块设置界面,可以对其各种参数进行设置,如图2-33所示。雷达检测器模块设置包括参数( Parameters)、测量( Measurements)和检测对象( Actor Profiles)的设置。
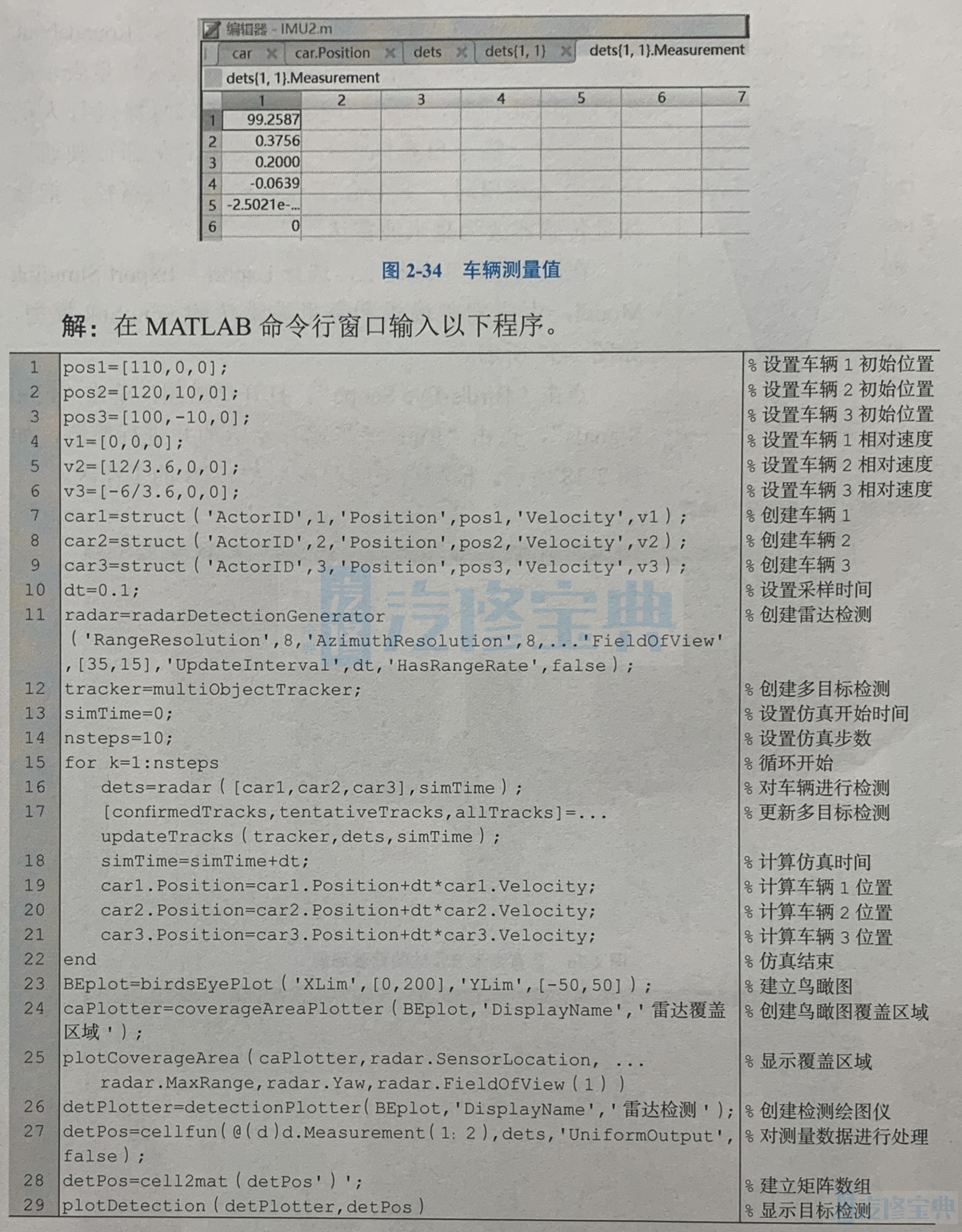
测量结果储存在 MATLAB的工作区,可以查看。车辆测量值如图2-34所示,雷达距前方车辆的距离为99.2587m,误差约为0.74%,满足测量精度要求。
【例2-2】使用安装在主车辆上的雷达检测前方多目标车辆。假设有三个目标车辆:车辆1位于中间车道,主车辆正前方110m,以与主车相同速度行驶;车辆2在左车道上,以比主车辆快12km/h的速度行驶;车辆3在右车道上,行驶速度比主车辆慢6km/h。
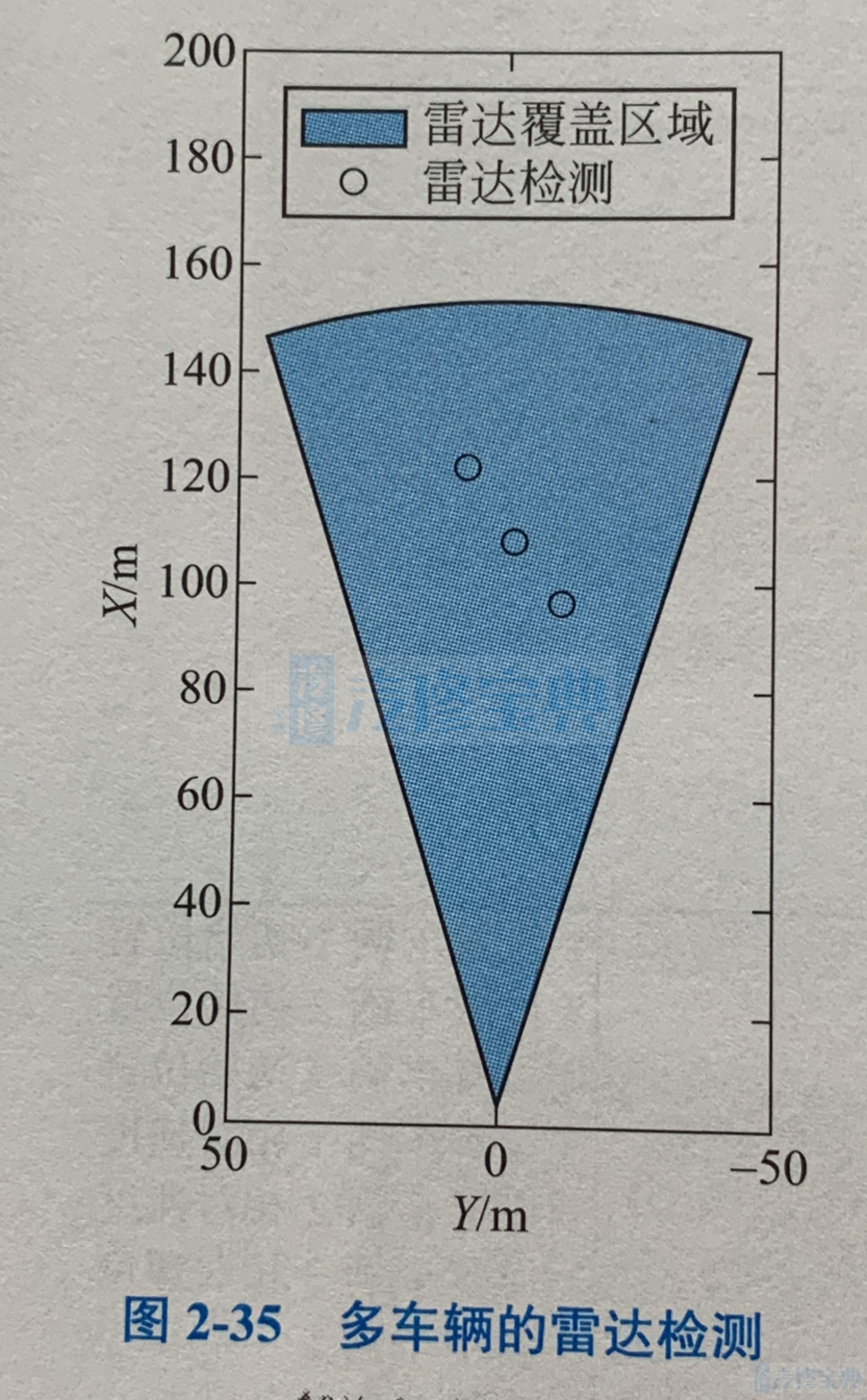
输出结果如图2-35所示。
车辆检测结果储存在 MATLAB工作区的dets文件中,可以查看。
可以任意设置目标车辆,检测任意时刻的车辆位置和速度。
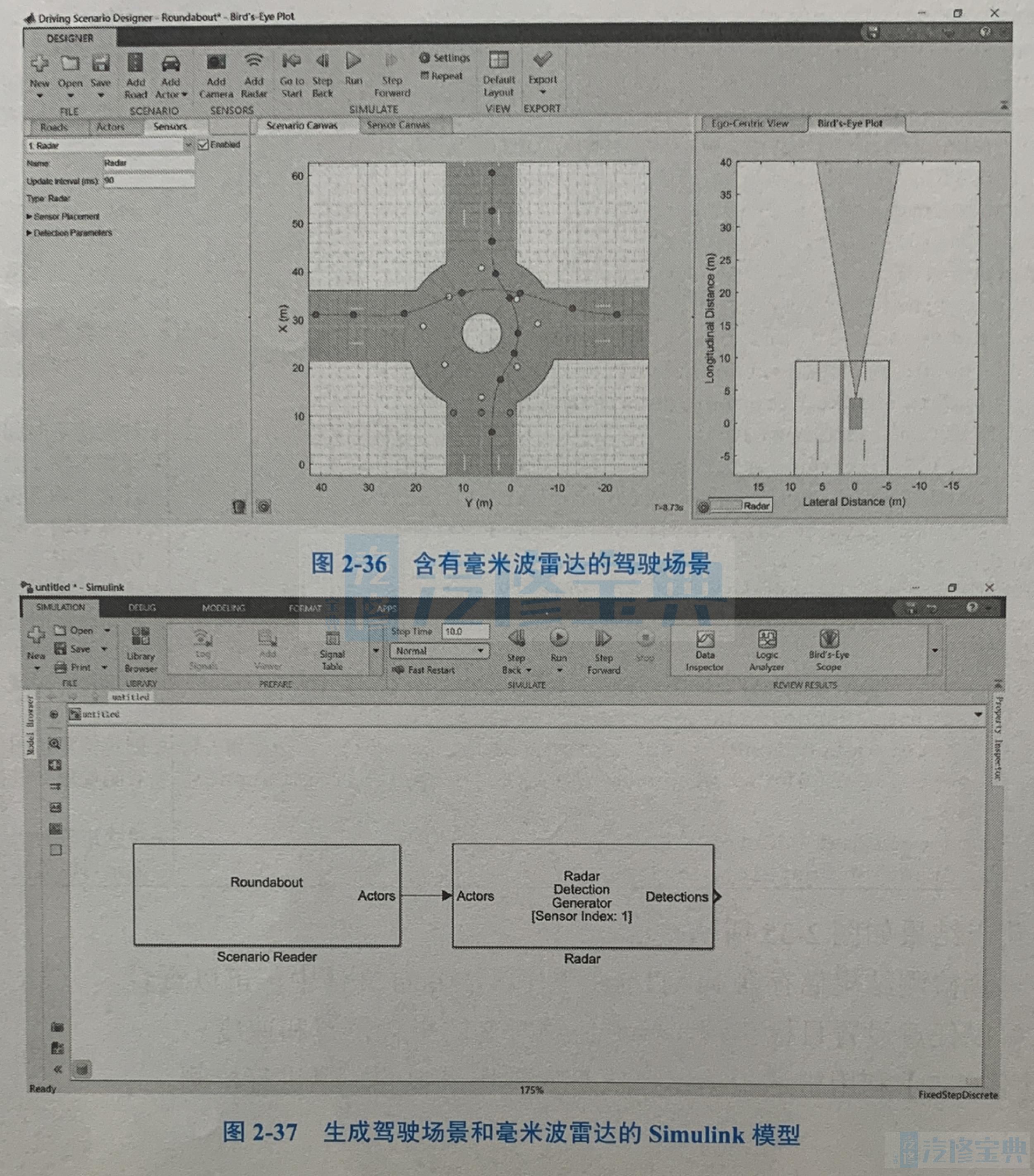
【例2-3】利用雷达检测器模块对驾驶场景中的车辆进行检测。
驾驶场景中的车辆和毫米波雷达的检测,可以根据需要进行设置。
毫米波雷达仿真技术及实例
来自:日久见人心
4年前
已收藏
收藏

253

0






{{isLoadList==1?'加载中...':(isLoadList==2&&(list.length
<=3||(list.length>3&&!is_hidden))?'没有更多内容了':'查看更多回答')}}


返回顶部