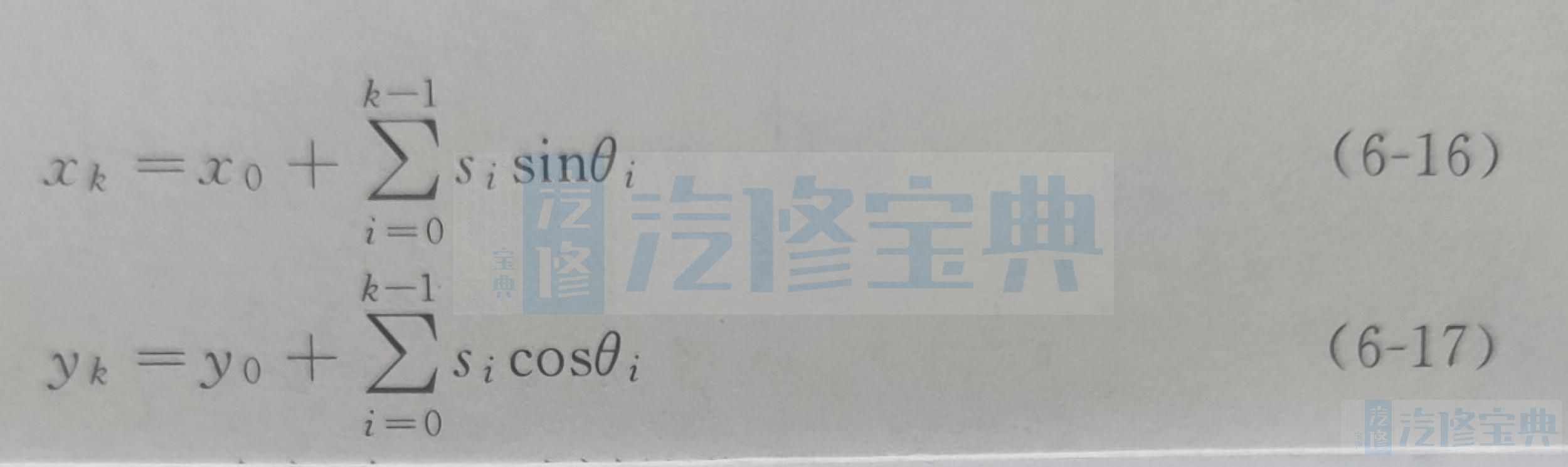
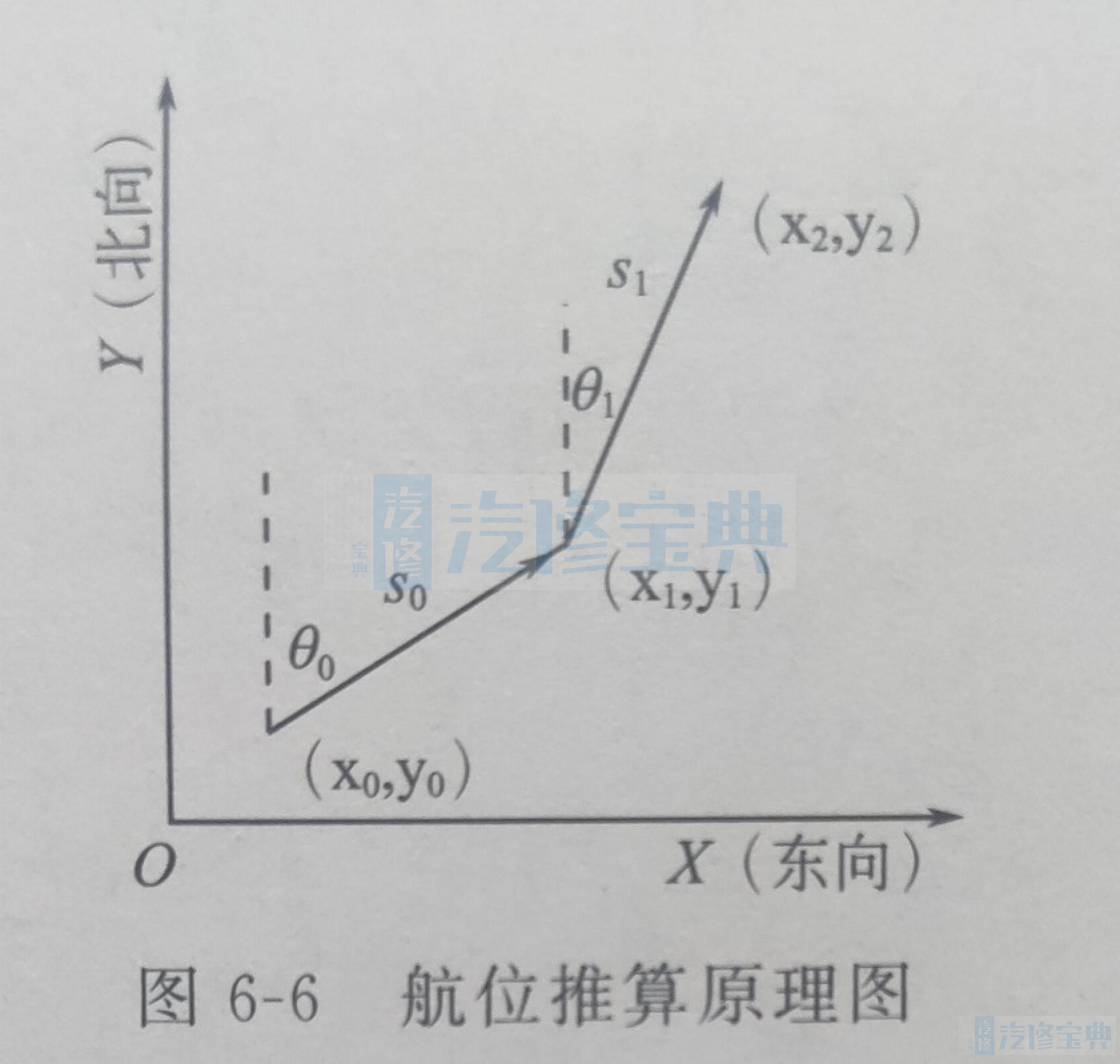
一、车载导航定位系统组成。 个典型的车载导航定位系统通常包括定位模块、数字地图和无线通信模块等。 定位模块是所有车载导航定位系统中的关键元件。为了帮助用户得到位置信息、给用户提供恰当的向导或者给监控器提供位置信息,车载定位必须精准。常用的定位技术有航位推算(DR)和GPS。 车辆航位推算( Dead Reckoning,DR)方法是一种常用的自主式车辆定位技术,相对于GFPS系统,它不用发射接收信号,不受电磁波影响,机动灵活,只要车辆能达到的地方都能定位,但是由于这种定位方法的误差随时间推移而发散,所以只能在短时间内获得较高的精度,不宜长时间单独使用。 DR是利用载体上某一时刻的位置,根据航向和速度信息,推算得到当前时刻的位置,即根据实测的汽车行驶距离和航向计算其位置和行驶轨迹。它一般不受外界环境影响,但由于其本身误差是随时间积累的,所以单独工作时不能长时间保持高精度。 DR的主要原理是利用DR传感器测量位移矢量,从而推算车辆的位置。航位推算原理图如图6-6所示,其中,(x,y)(1=1,2…)是车辆在ti时刻的初始位置,航向角θi和行驶距离si分别是车辆从ti时刻到ti+1时刻的绝对航向和位移矢量长度。 由图6-6可推得:
式中,xk,yk(k=1,2…)是车辆在tk时刻的位置。
由此可见,航位推算必须通过其他手段提供车辆初始位置和初始航向角,位移和航向角的变化量要实时采样,而且采样频率要足够高,这样就可以近似认为采样周期内车辆加速度为零。航位推算的误差随距离和时间积累,不能长期单独使用,可以借助于GPS系统对其定位误差进行补偿。
无线通信模块是车辆定位和导航中的关键器件。除了提供个人呼叫以外,还提供一种语音数据转换信道,以便驾驶员获得一些信息,诸如实时交通信息、天气和旅行信息等。作为交通管制中心,可以通过无线移动通信网络得到路网中汽车的信息,并为其提供相应的服务。
定位模块通过与无线通信模块、数字地图等相结合,可以实时更新位置信息,提高定位精度。
二、GPS/DR组合导航定位系统。
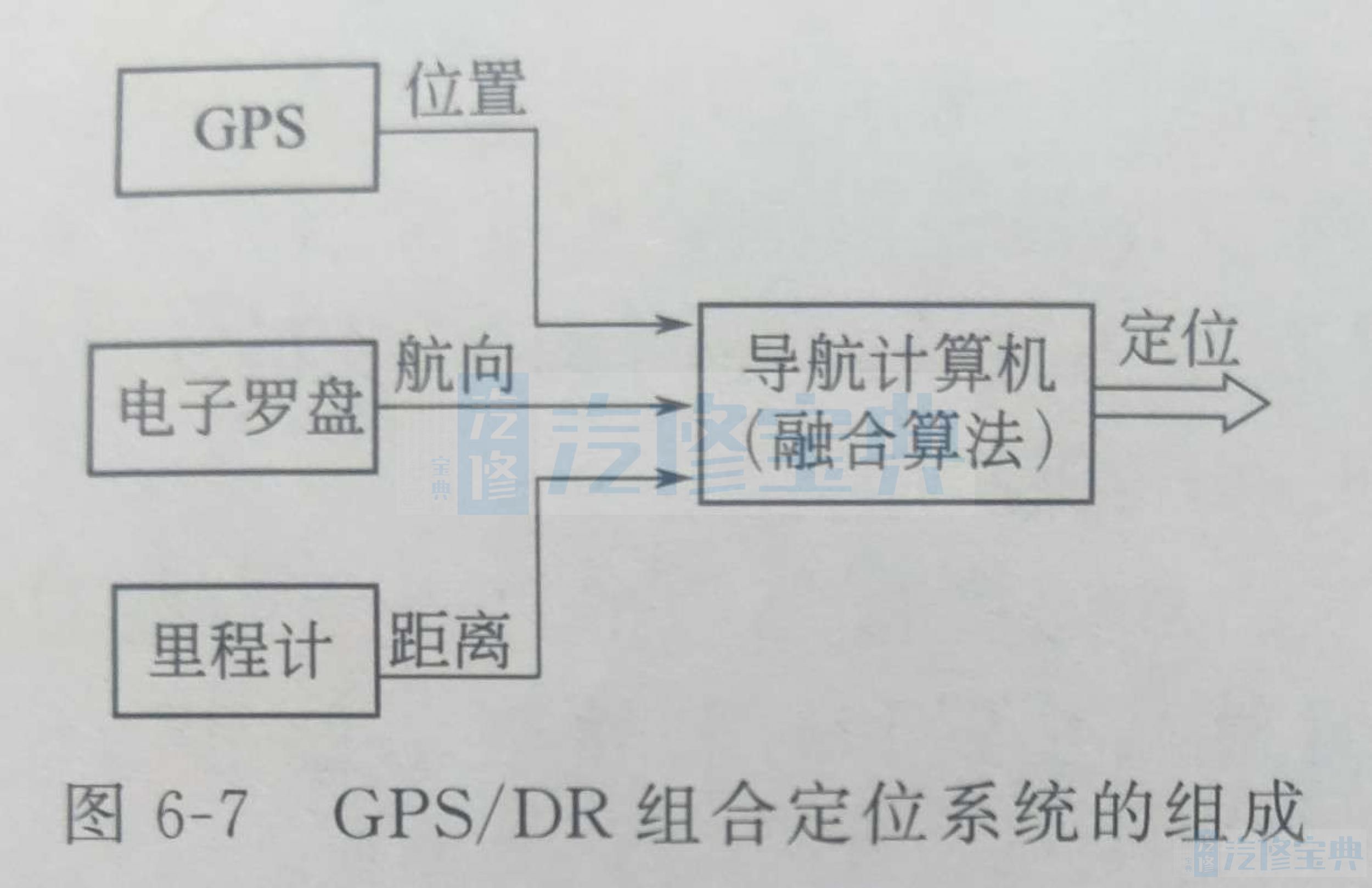
GPS/DR组合导航定位系统由GPS以及电子罗盘、里程计和导航计算机等组成,如图6-7所示。
GPS独立给出车辆所在位置的绝对经度、纬度和海拔高度;电子罗盘作为航向传感器测量车辆的航向;里程计测量汽车单位时间内行驶的里程;导航计算机采集各传感器数据并做航迹推算、GPS坐标变换及相关数据预处理,由融合算法融合估计出车辆的动态位置。GPS/DR组合导航定位系统是一种相对低成本的导航系统,在这个系统上进行GPS/DR数据融合,可以实现较高精度的导航定位。
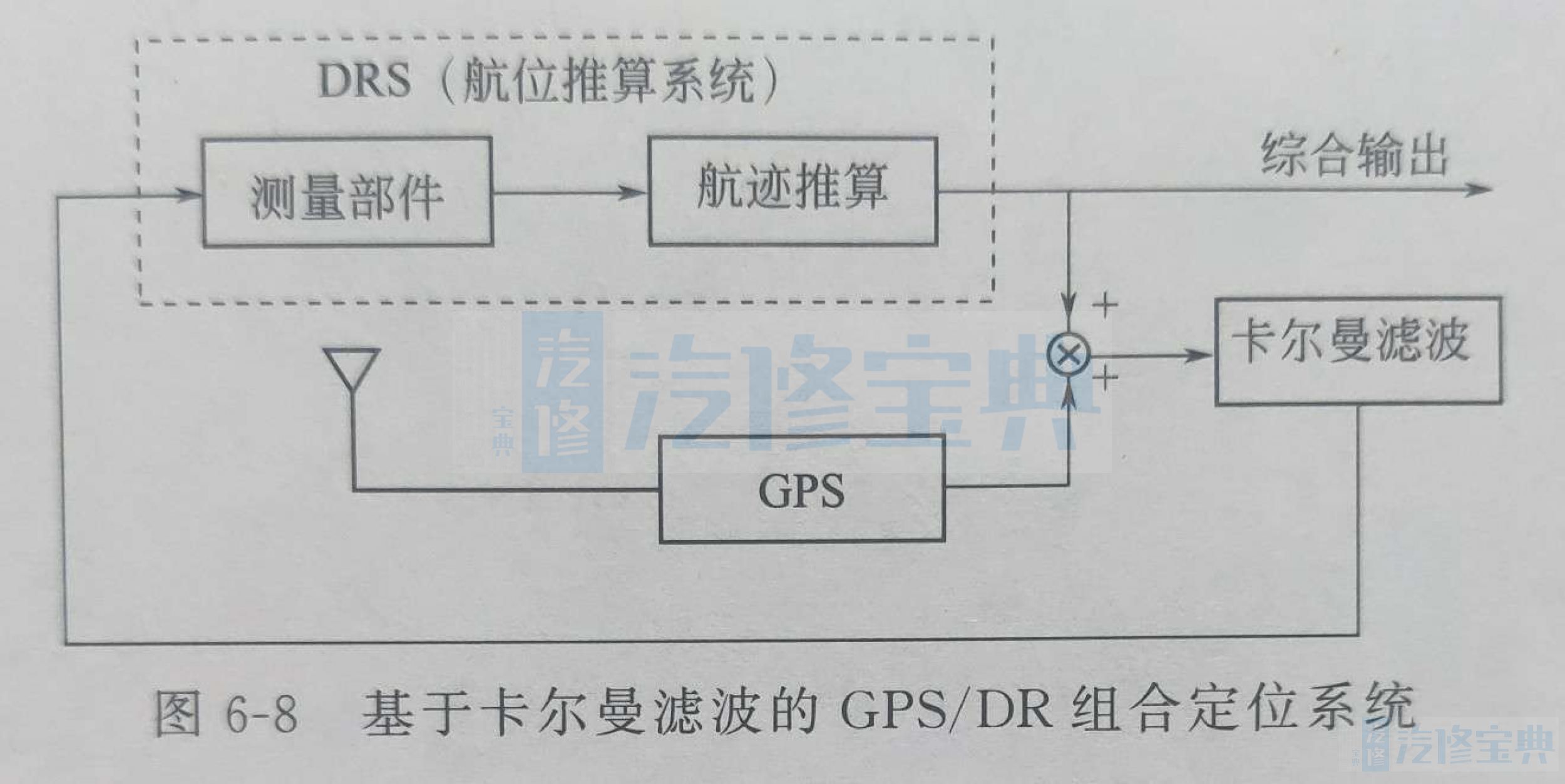
要实现GPS/DR组合定位的关键在于如何将两者的数据融合以达到最优的定位效果。目前,关于GPS/DR组合的数据融合方法很多,最常见也是使用最广泛的就是卡尔曼滤波方法。将卡尔曼滤波应用于GPS/DR组合定位系统当中,就是将GPS和DR的定位信息综合用于定位求解,通过卡尔曼滤波来补偿修正DR系统的状态,同时滤波之后的输出又能够为DR系统提供较为准确的初始位置和航向角,从而能够获得比单独使用任意一种定位方法都更高的定位精度和稳定性,其结构图如图6-8所示。