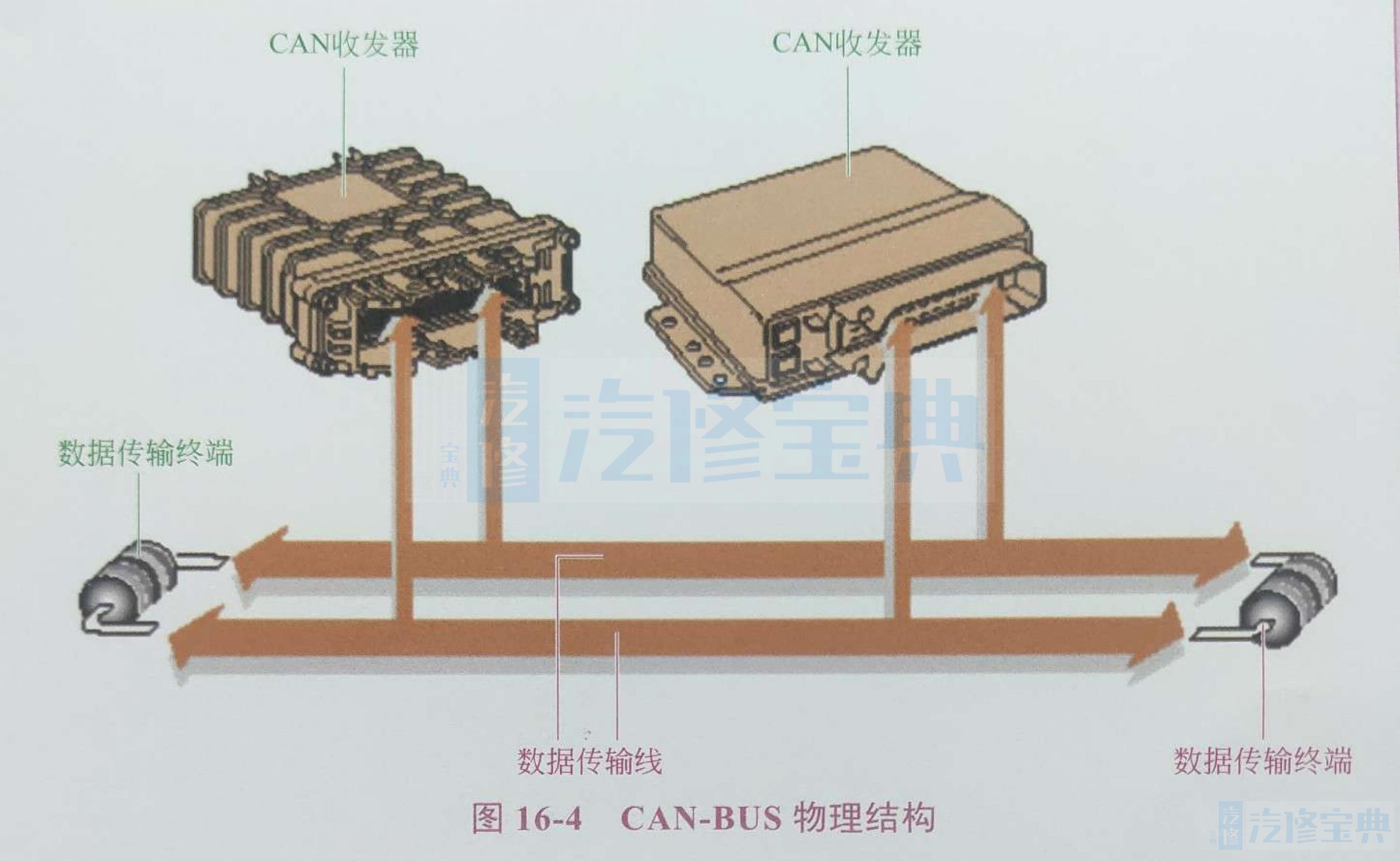
如图16-4所示,CAN总线是两个以上模块构成的汽车网络,每一个模块既可以接收信息,也可以发送信息,每个模块中都有一个CAN收发器用来与外界通信,一个CAN网络里会安装两个终端电阻(一般只有高速CAN网络才会有终端电阻)。总线使用双绞线来进行通信,一个为CAN-L(低速CAN),一个为CAN-H(高速CAN),如图16-5所示。
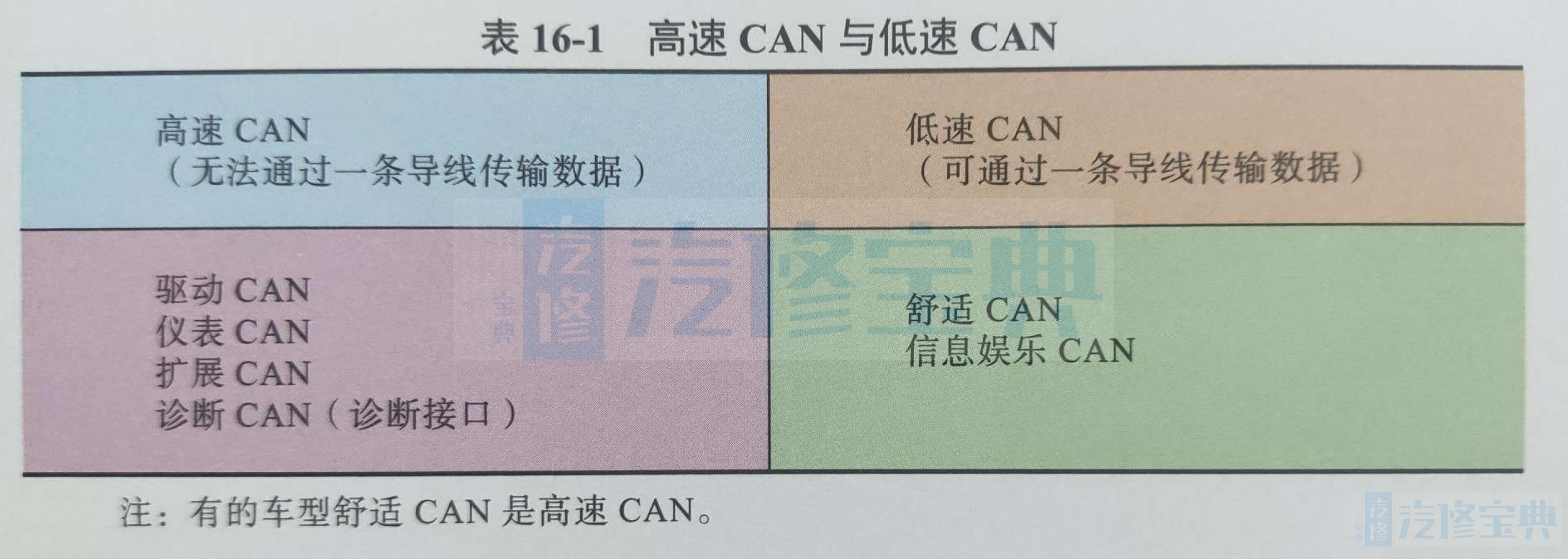
高速CAN和低速CAN见表16-1。
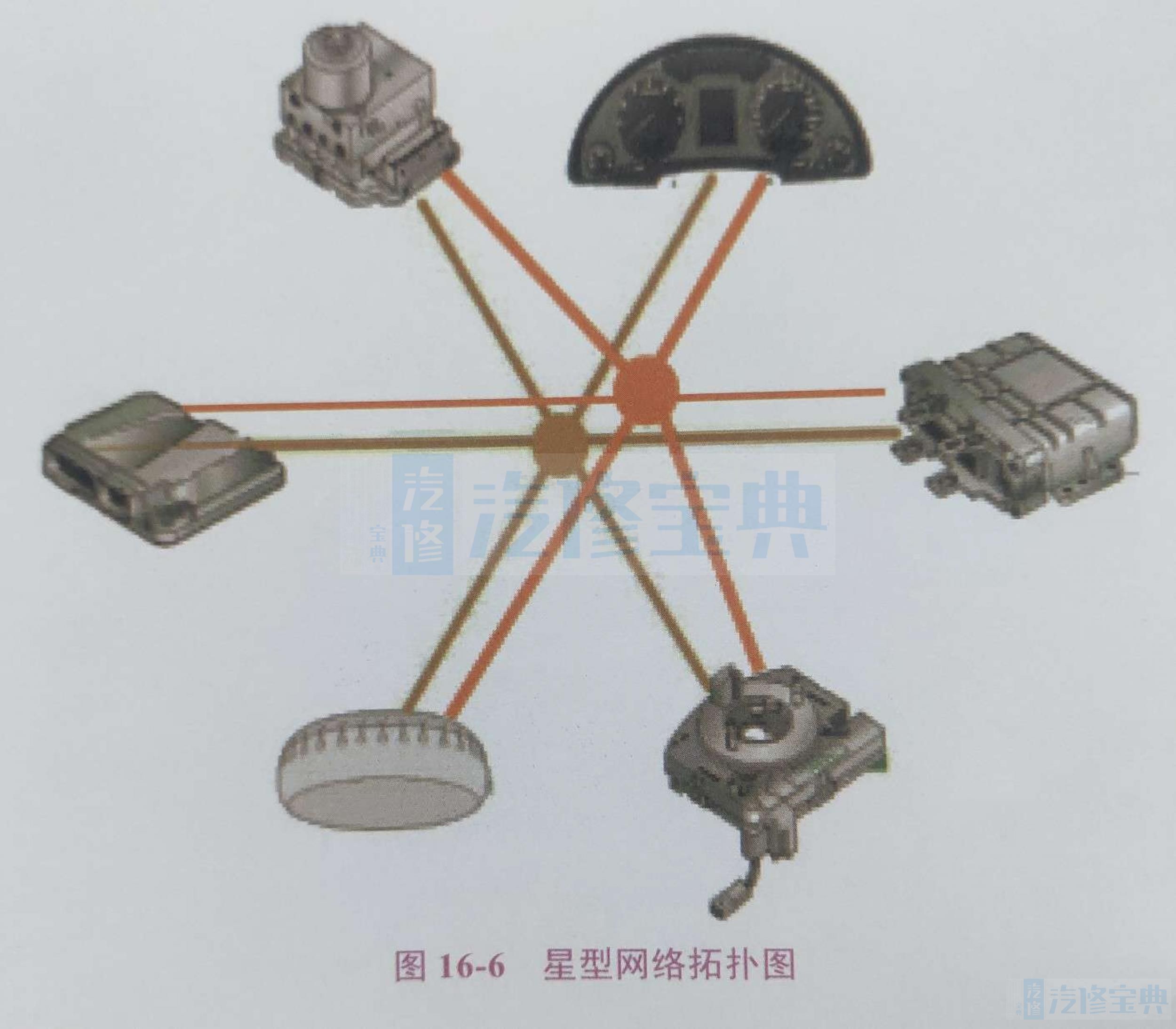
(1)星型网络。
总线拓扑图表达了各个模块之间的连接关系。什么是星型网络拓扑图呢?如图16-6所示,每一个需要联网的模块都会连接两根CAN总线,把所有的CAN总线全部铰接在一起就构成了一个星型网络拓扑图。这个铰接点称为网络结点。
在星型网络中,铰接点可能是直接将线束连到一起的,如图16-7所示。这种方法在很多低端车型中经常应用,当然,也有可能单独将铰接点引出。
还有一种是很多高端车型采用到的,它是把一个系统的总线(驱动CAN/舒适CAN)全部集中到一个插头上,如图16-8所示,用短接插头就可以完成所有模块的连接。这样做的目的是便于维修,如果哪条支路出现问题了,例如短路等,可以拔掉插头,快速地对每一个控制单元的总线进行测量。
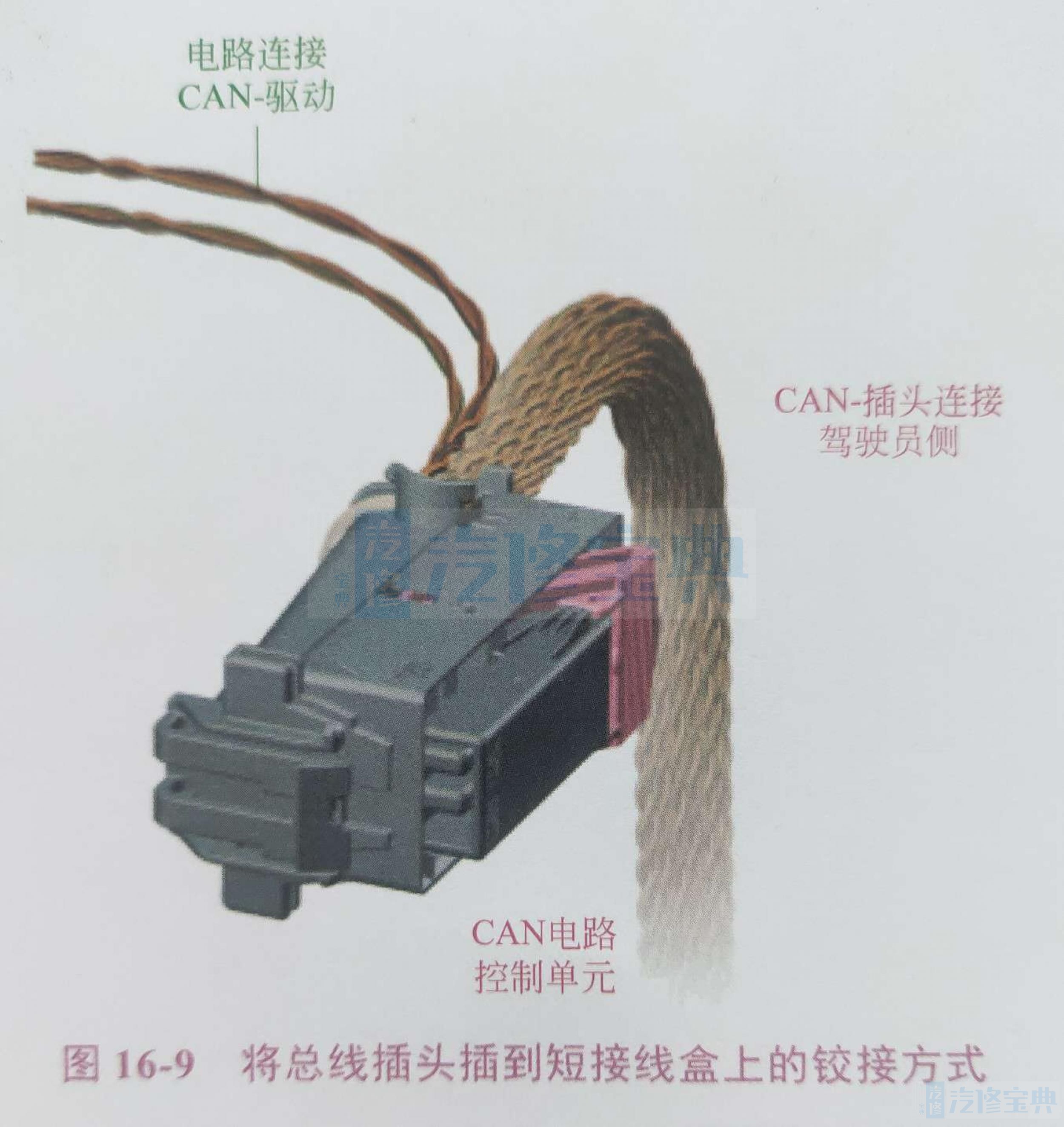
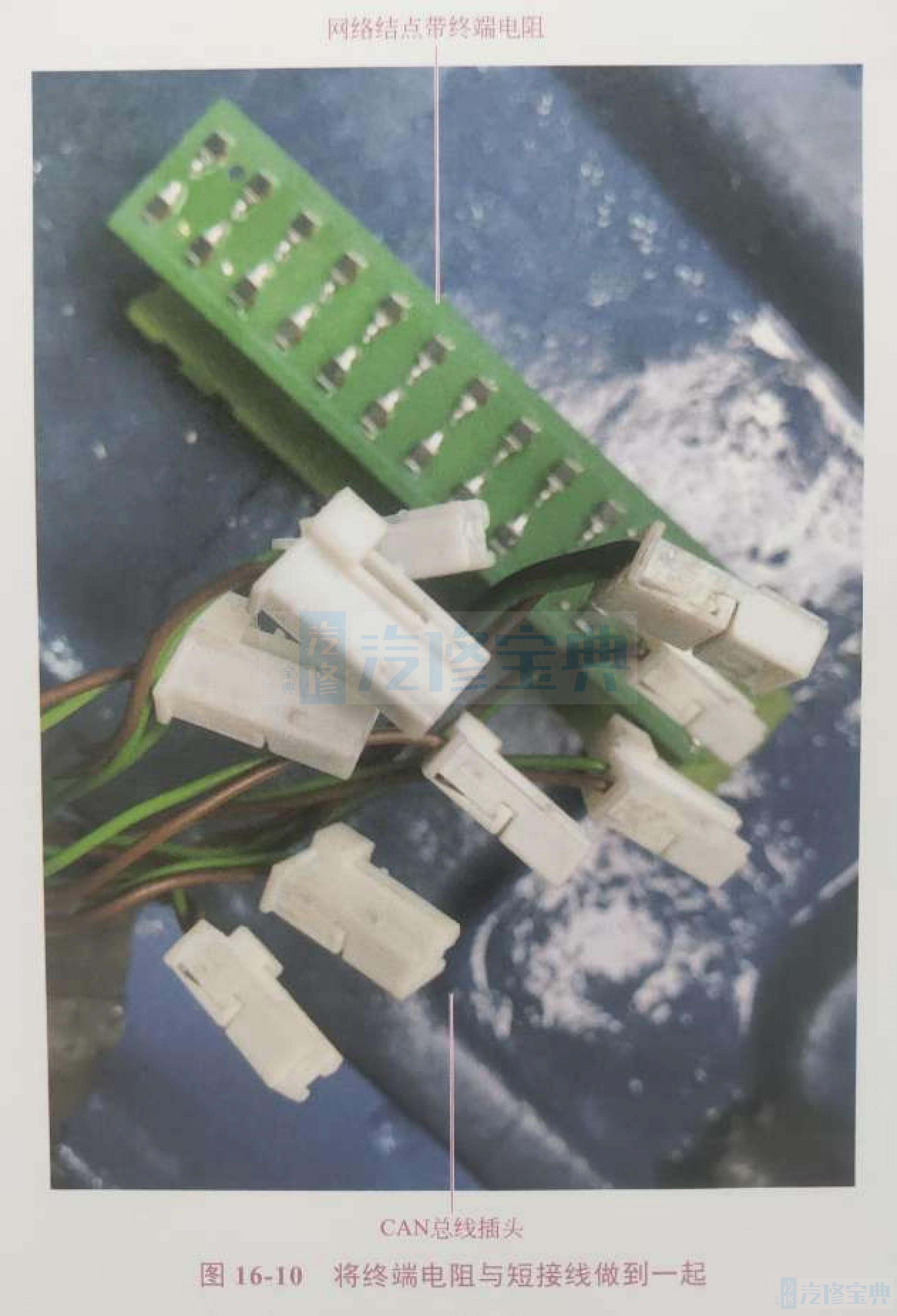
除了以上这种形式外,还有很多车型把总线做到一个插头上,然后插到一个小盒子上,盒子里面就是短接线(图16-9)。有的车型还可能会把终端电阻做到盒子里,如图16-10所示。
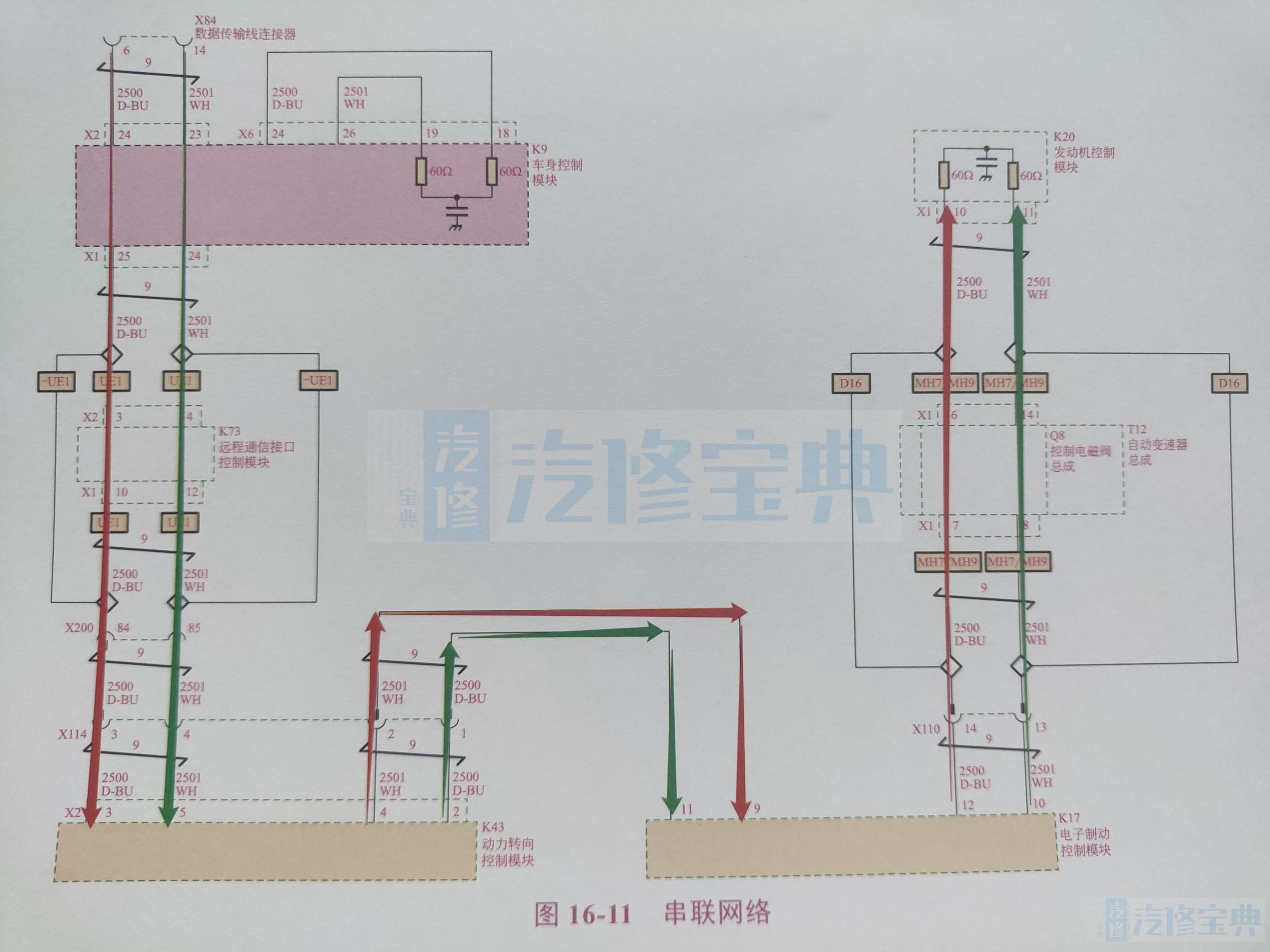
(2)串联网络。
串联网络在美系车中经常遇到。串联网络是指把所有模块依次串联起来,如图16-11所示。这样做的优点是省掉了网络结点;缺点是如果串联网络中任意模块出现开路等故障,整个网络就瘫痪了。