脉冲( Pulse)也是在极短的时间内从某一基准变成另一基准,然后再恢复至原基准的信号,如图1-2-3所示。但是,脉冲波的脉宽和周期往往变化很大,基准电压也不一定是零电平。 脉冲与方波的不同点在于占空比( Duty cycle)的不同。脉冲的占空比可以有不同的比值,从0~100%皆可占空比小于50%称为窄幅波;超过50%者称为宽幅波。通常窄幅波因作用时间(ON-time)短,而使电子元件的功率低,故较常使用。 图1-2-4表明脉冲的频率与脉冲宽度无关。图1-2-4a表示两频率相同而脉冲宽度不同的脉冲;图1-2-4b则是两个频率不同而脉冲宽度却保持不变的脉冲。由此可见,利用脉沖来控制部件,其波形变化是相当多的,可以满足汽车不同部件的需要。
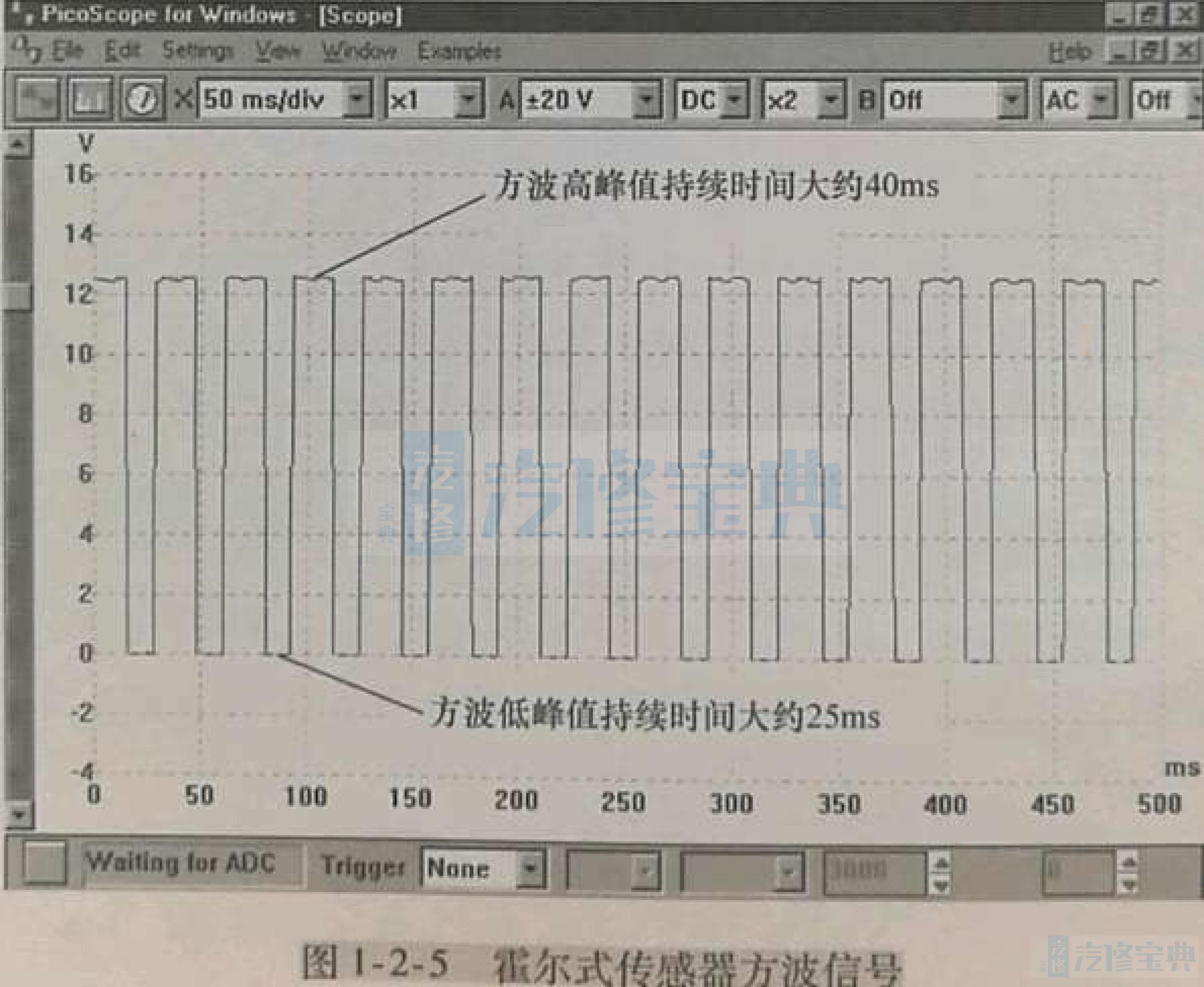
例如,汽车上常见的霍尔式传感器输出信号就是方波信号,如图1-2-5所示。该方波信号峰值Um=12.5V,-Um=0V,一个周期,占空比大约是a/(a+b)=40/(40+25)=40/65=61.5%。
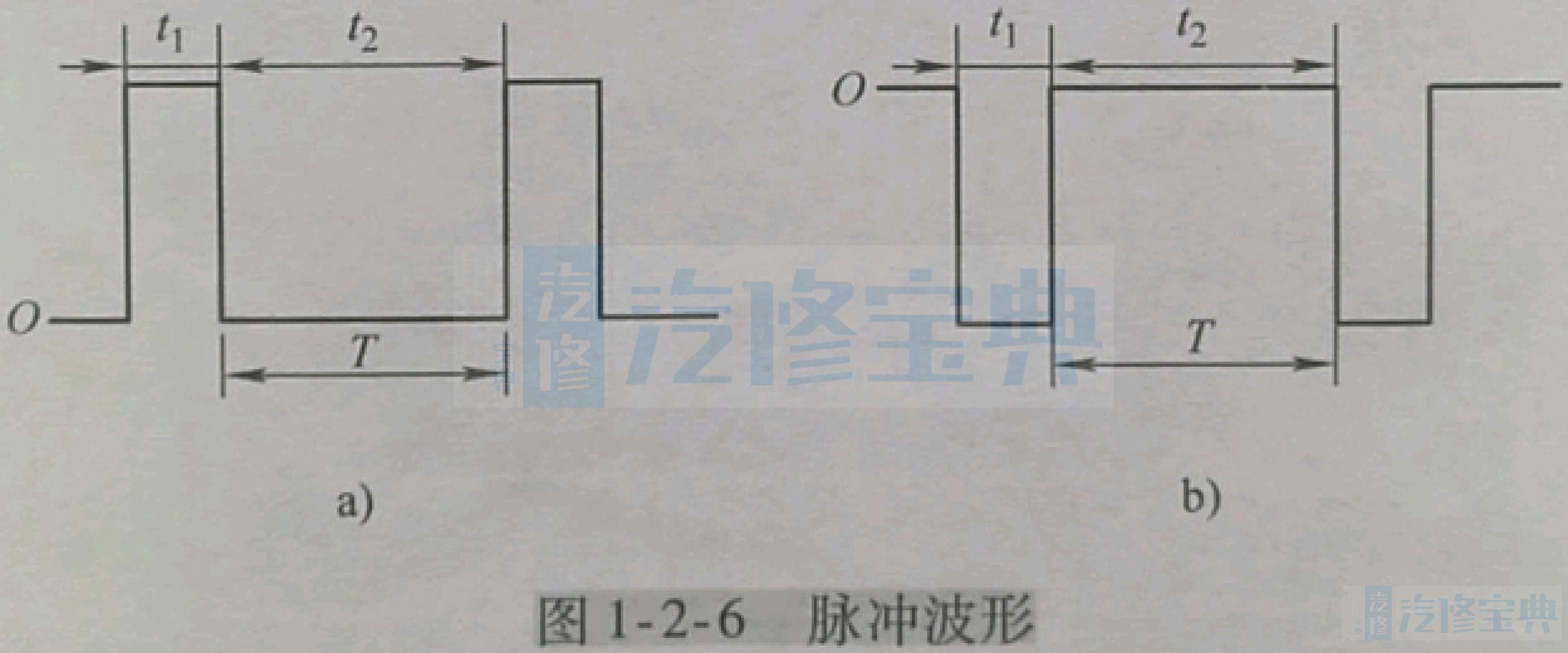
当脉冲是在零线以上时,称此脉冲波形为正向脉冲,如图1-2-6a所示;反之,如图1-2-6b所示,当脉冲在零线以下时,称此脉冲波形为“负向脉冲”。
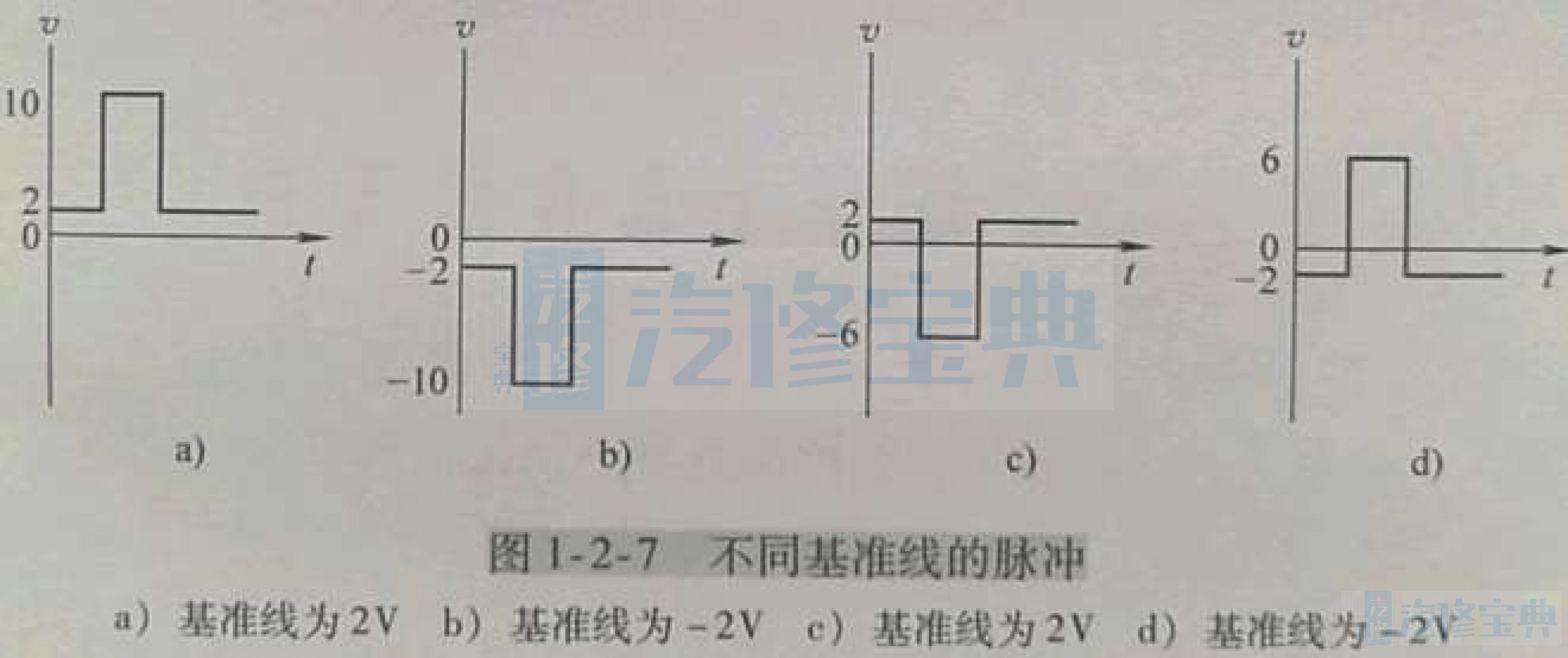
此外,脉冲的基准线未必是0V,可以是任何电压值,如图1-2-7所示。
上述是比较理想状态下的脉冲波形,事实上,汽车实际波形远远比这个复杂,下面就是利用双通道示波器检测的起动机波形。
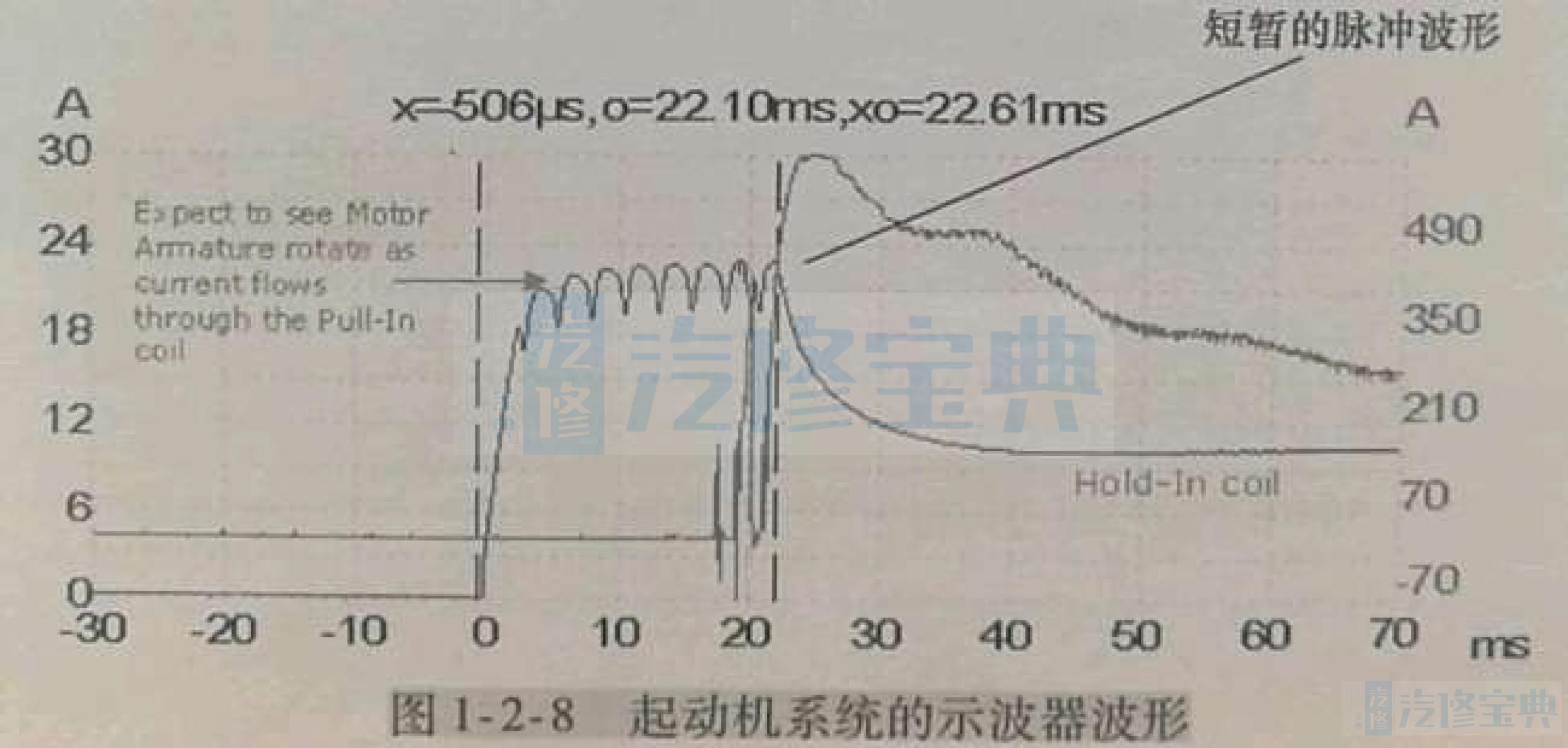
如图1-2-8所示,左侧波形反映的是通道A测量起动机电磁线圈电流,右侧波形反映的是通道B测量起动机电流。
可以通过图1-2-8反映出,这两个波形均呈现出一种比较复杂的脉冲波形,左侧的起动机电磁线圈的波形,通电后在5ms之内,急速上升,振荡大约8个脉冲,电流大小在18-24A之间,然后趋于稳定下降,电流最终稳定在10A左右。右侧波形是起动机电动机的电流波形,可以发现起动机电流峰值超过630A,经过大约50ms的时间,短促回到210A,这样细微的大电流变化,是传统钳形电流表所无法测量的。
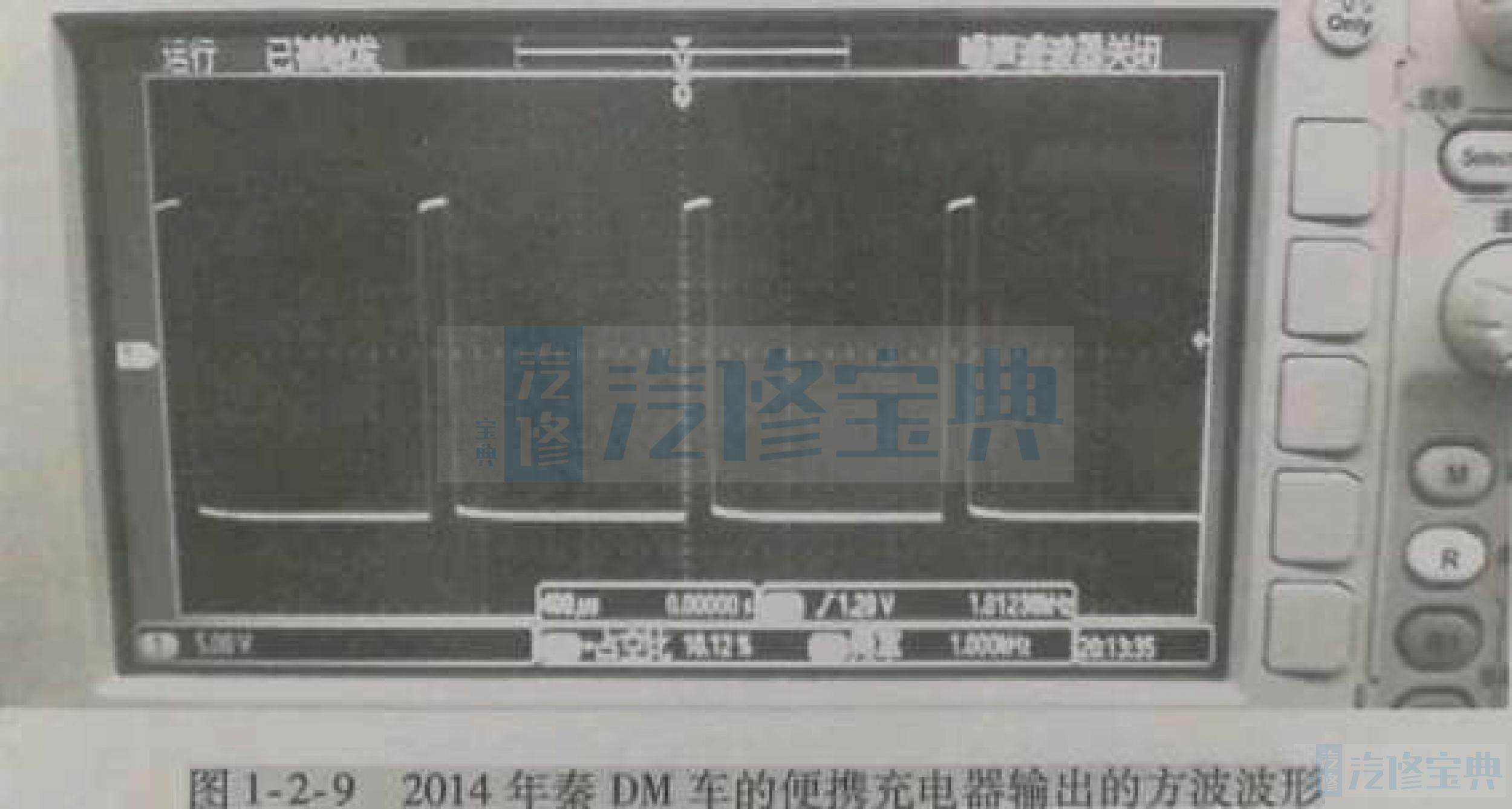
图1-2-9是2014年秦DM车交流充电口的CP信号波形,横坐标是400ms,纵坐标是1.2V,因此高电位大约5V,占空比10.12%,频率1000Hz,这个波形是正常的。