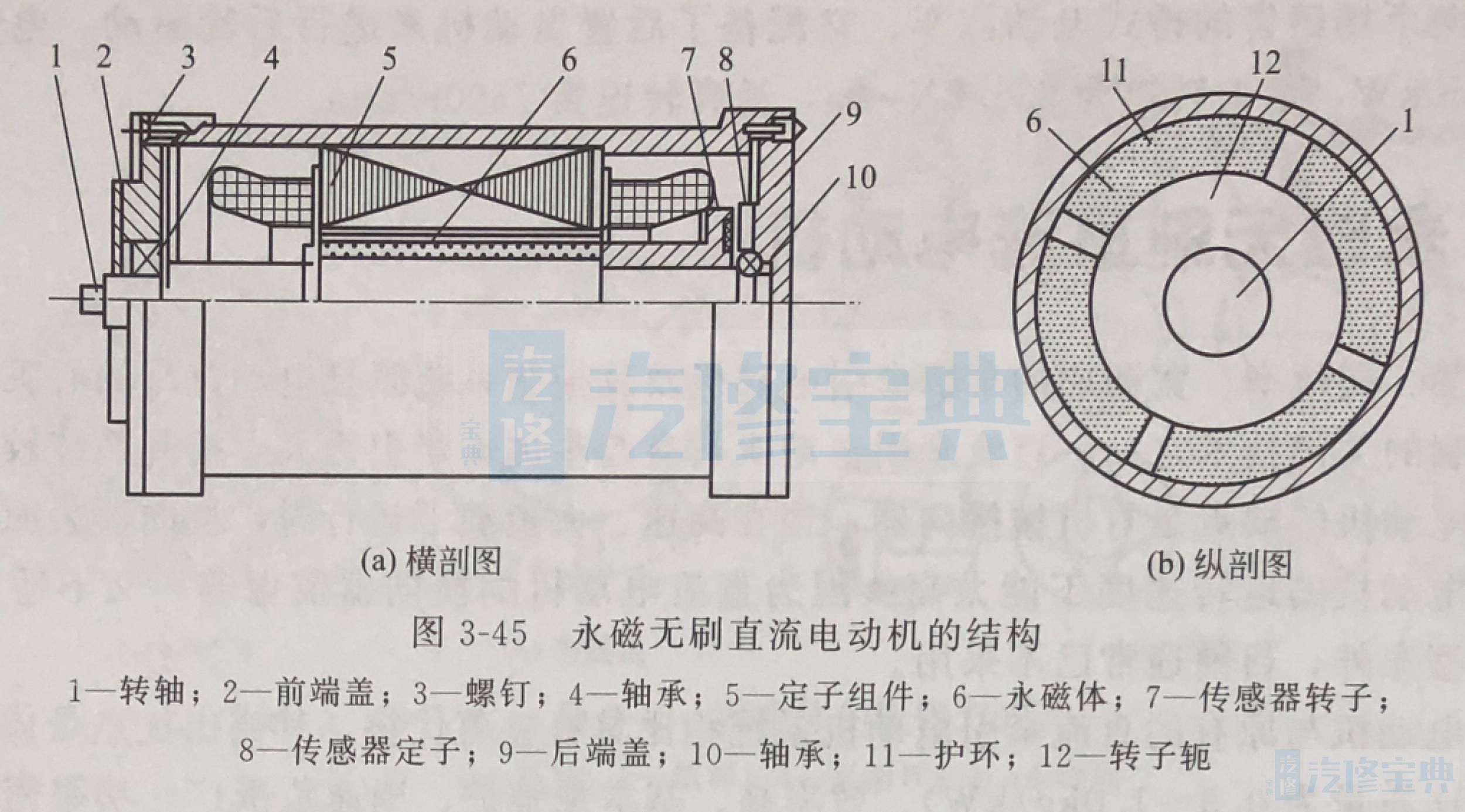
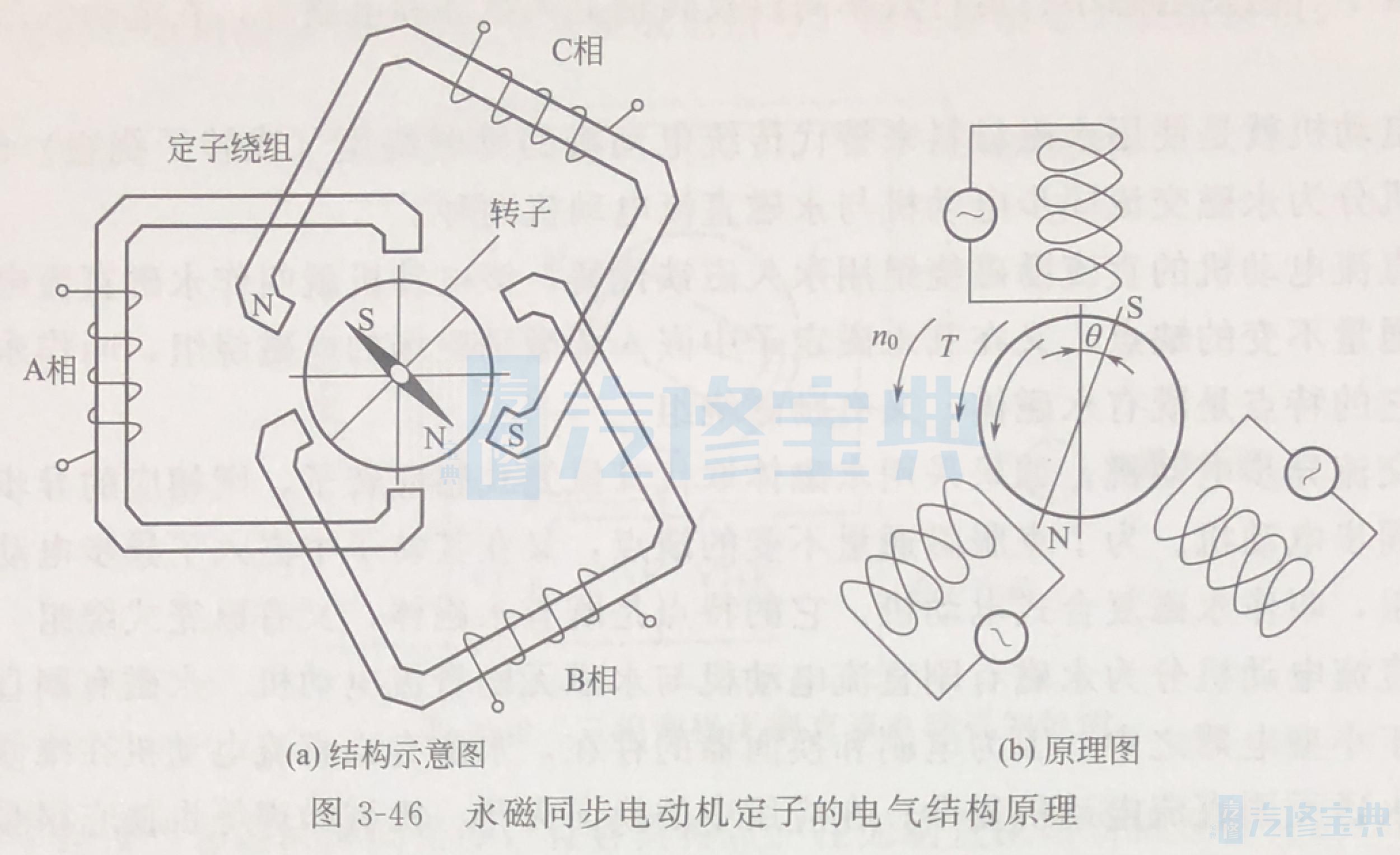
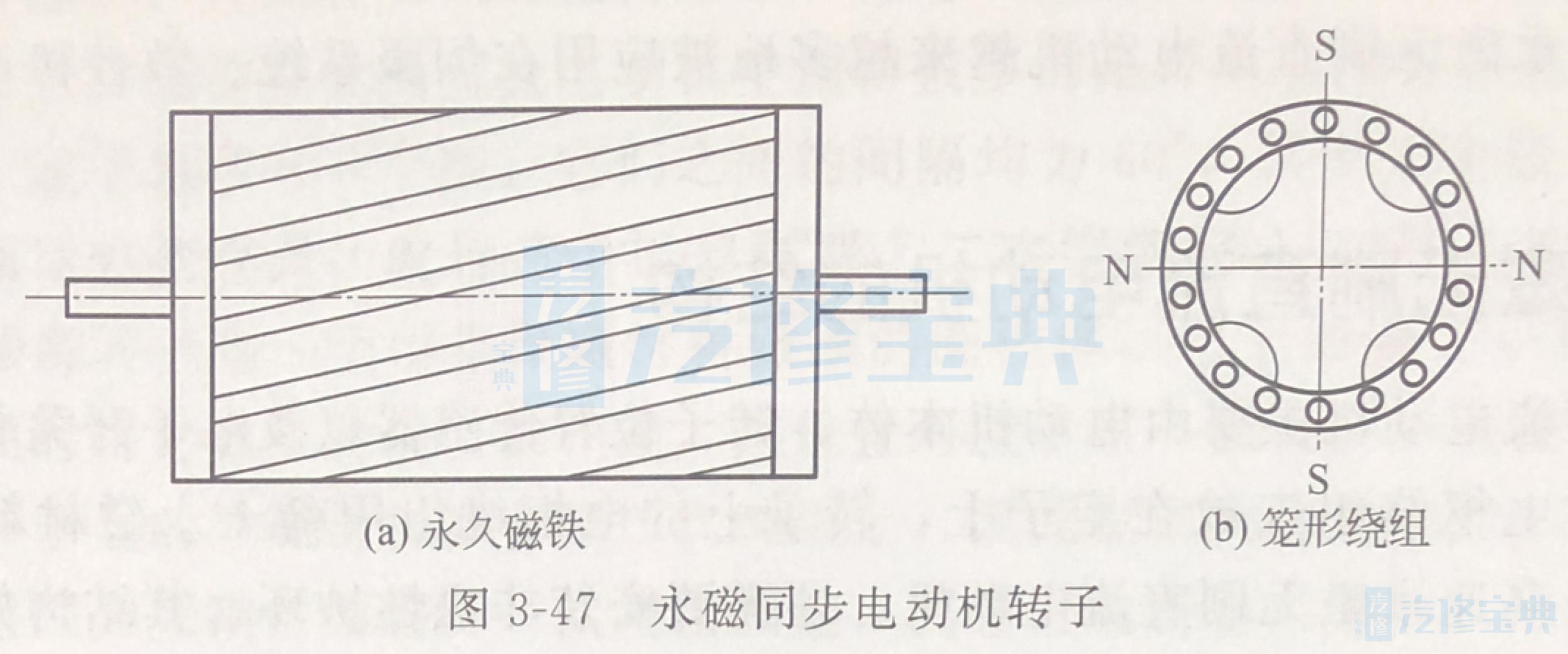
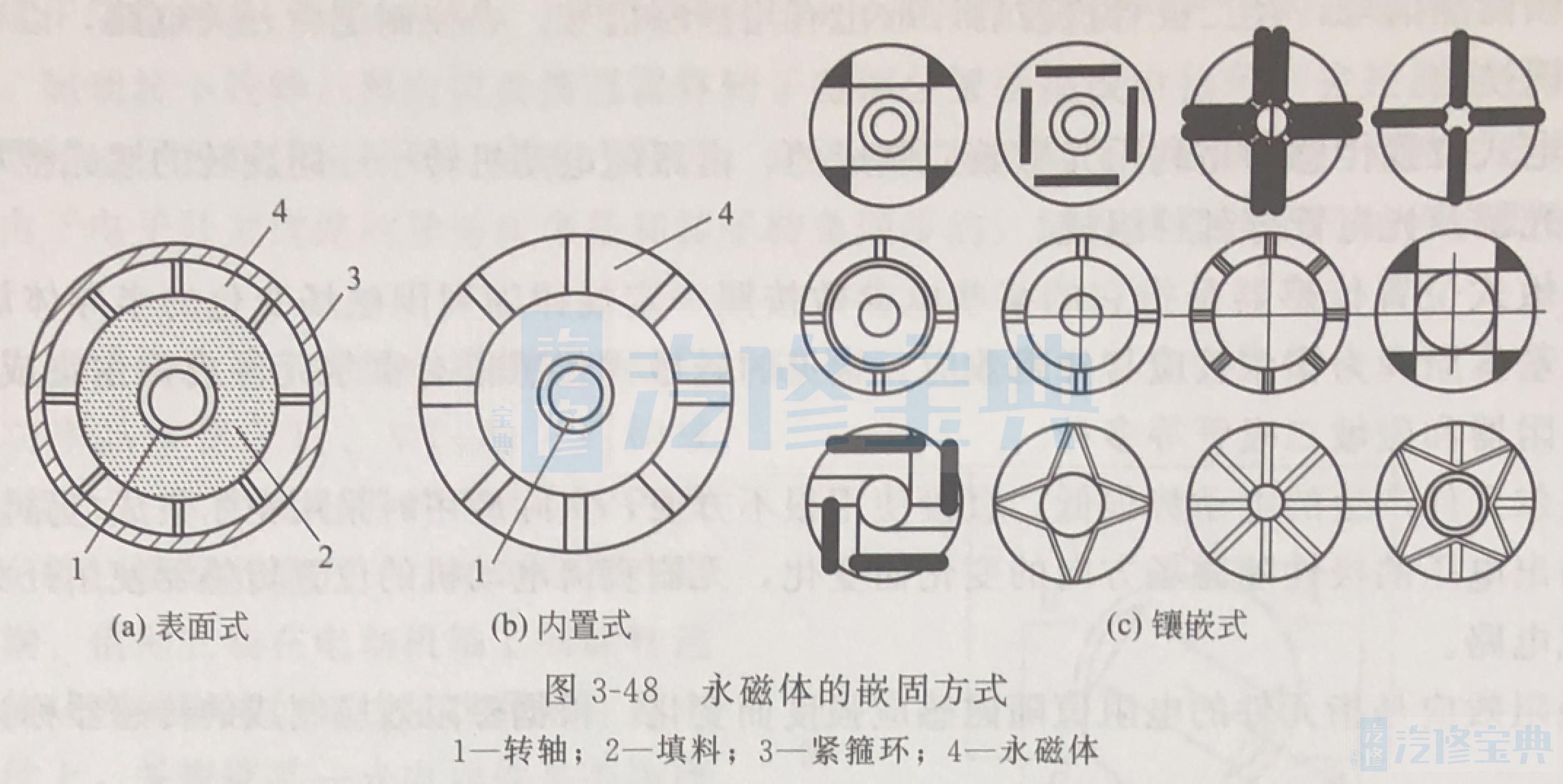
永磁无刷直流电动机主要由电动机本体、转子位置传感器以及电子开关驱动电路三部分组成。三相对称电枢绕组安放在定子上,转子上的电枢绕组用稀土永磁材料(钐钴、钕铁硼)取代。对于高速永磁无刷直流电动机,还需要安装非磁性护环,其结构如图3-45所示。 (1)永磁同步电动机定子永磁同步电动机定子绕组的主要电气参数、绕组形式和绕线式三相同步电动机的定子绕组一样,通入交流电源即产生旋转磁场,如图3-46所示为永磁同步电动机定子的电气结构原理。 (2)永磁同步电动机转子永磁同步电动机转子使用径向永久磁铁作磁极,如图3-47所示。在旋转磁场的作用下,转子将随着旋转磁场同步旋转,旋转磁场的速度取决于电源频率。与三相交流电动机的同步电动机相似,永磁同步电动机可以产生理想的恒转矩。 根据永磁体在转子上安装位置的不同,永磁同步电动机可以分为表面式、内置式和镶嵌式等几种结构形式,如图3-48所示。表面式同步电动机的优点是结构简单,因为永磁体的磁导率接近空气的磁导率,所以永磁同步电动机有较大的有效气隙,电枢反应降低。内置式同步电动机具有较高的磁显性,可产生额外的磁阻转矩分量,保持高速运行时的机械稳定性。镶嵌式电动机的永磁体可以有多种镶嵌方式,其性能介于表面式与内置式电动机之间。
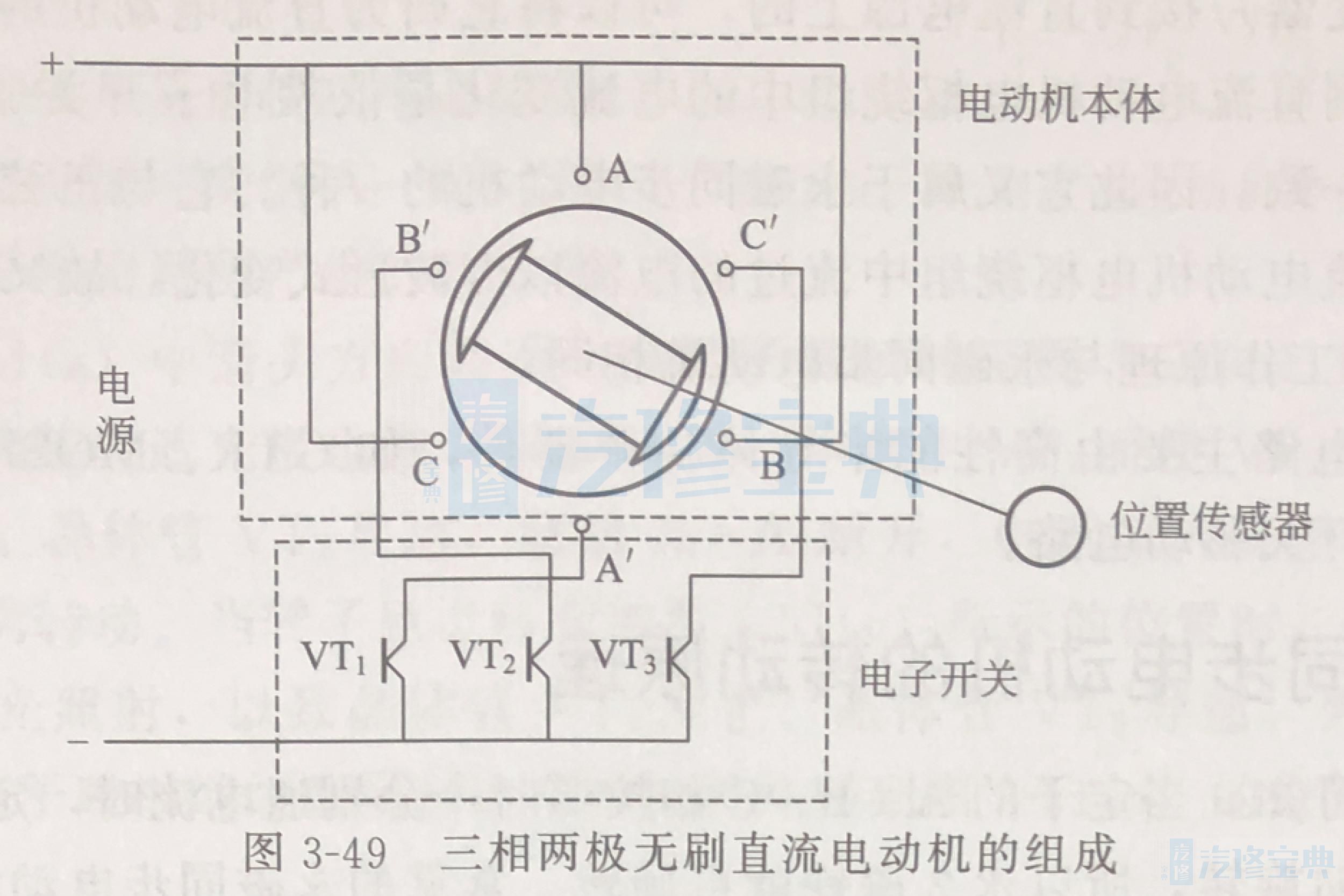
(3)转子位置传感器 如图3-49所示为三相两极无刷直流电动机的组成,转子位置传感器在无刷直流电动机中起着测定转子磁极位置的作用,为逻辑开关电路提供正确的换相信息,即将转子磁钢磁极的位置信号转换成电信号,再去控制定子绕组换相。
转子位置传感器的种类很多,且各具特点。在无刷直流电动机中常见的位置传感器包括电磁式位置传感器、接近开关式位置传感器、光电式位置传感器和磁敏式位置传感器。
电磁式位置传感器在无刷直流电动机中用得较多的是开口变压器,它由定子与跟踪转子两部分组成。定子通常有6个极,它们之间的间隔均为60°,其中3个极上绕一次绕组,并相互串联后通以高频电源;此外三个极分别绕上二次绕组WA、WB、WC,它们之间分别间隔120°。跟踪转子是一个用非导磁材料做成的圆柱体,它上面镶了一块120°的扇形导磁材料。在安装时将它和电动机转轴相连,其位置对应于某一磁极。一次绕组所产生的高频磁通通过跟踪转子上的导磁材料耦合到二次绕组上,因此在二次绕组上产生感应电压,而此外两相二次绕组因为无耦合回路同一次绕组相连,其感应电压基本为零。随着电动机转子的转动,扇形片也一同旋转,使其离开当前耦合的一次绕组而向下次绕组靠近。这样,随着电动机转子的运动,在开口变压器二次绕组上分别感应出电压。扇形导磁片的角度往往略大于120°电角度,常采用130°电角度。在三相全控电路中,为了换相译码器的需要,扇形导磁片的角度为180°电角度。同时,扇形导磁片的个数应与无刷直流电动机的极对数相等。
接近开关式位置传感器主要由谐振电路和扇形金属转子两部分组成。当扇形金属转子接近振荡回路电感元件L时,电路的Q(品质因数)值下降,造成电路正反馈不足而停振,故输出为零;当扇形金属转子离开电感元件L时,电路的Q值开始上升,电路又重新起振,输出高频调制信号,经二极管检波后,取出有用控制信号,去控制逻辑开关电路,以确保电动机正确换向。
光电式位置传感器是利用光电效应制成的,由跟随电动机转子一同旋转的遮光板和固定不动的光源及光电管等部件组成。
磁敏式位置传感器是指它的某些电参数按照一定规律随周围磁场变化的半导体敏感元件。其基本原理为霍尔效应与磁阻效应。常见的磁敏式传感器有霍尔元件或霍尔集成电路磁敏电阻器和磁敏二极管等多种。
霍尔元件产生的电动势很低,直接使用很不方便,实际应用时采用霍尔集成电路。霍尔元件输出电压的极性随磁场方向的变化而变化,无刷直流电动机的位置传感器使用开关型霍尔集成电路。
磁阻效应是指元件的电阻值随磁感应强度而变化。根据磁阻效应制成的传感器称为磁阻电阻。
(4)电子开关驱动电路永磁无刷直流电动机的定子绕组是由电子开关驱动电路中的外部换向器”(逆变器)接到直流电源上的,可以将它归为直流电动机的一种。从逆变器的角度来看,永磁无刷直流电动机电枢绕组中的电流变化是依靠电子开关驱动电路来完成的,其频率与转速变化一致,因此它又属于永磁同步电动机的一种。它与正弦永磁同步电动机的主要区别是无刷直流电动机电枢绕组中流过的电流以方波形式变化,故又叫作“方波交流永磁电动机”。所以其工作原理与永磁同步电动机相同。
电子开关驱动电路主要由高性能半导体功率器件,如GTR、 MOSFET、IGBT、IPM等组成全桥或半桥开关驱动电路。