道路检测的任务是提取车道的几何结构,如车道的宽度、车道线的曲率等确定车辆在车道中的位置、方向;提取车辆可行驶的区域。 根据道路构成特点,道路可以分为结构化道路和非结构化道路两类。 结构化道路具有明显的车道标识线或边界,几何特征明显,车道宽度基本上保持不变,如城市道路、高速公路。结构化道路检测一般依据车道线的边界或车道线的灰度与车道明显不同实现检测。结构化道路检测方法对道路模型有较强的依赖性,且对噪声、阴影、遮挡等环境变化敏感。结构化道路识别技术比较成熟。 非结构化道路相对比较复杂,一般没有车道线和清晰的道路边界,或路面凹凸不平,或交通拥堵,或受到阴影和水迹的影响。多变的道路类型,复杂的环境背景,以及阴影与变化的天气等都是非结构化道路识别方法所面临的困难,道路区域和非道路区域更难以区分,所以针对非结构化道路的道路检测方法尚处于研究阶段。非结构化道路检测主要依据车道的颜色或纹理进行检测。
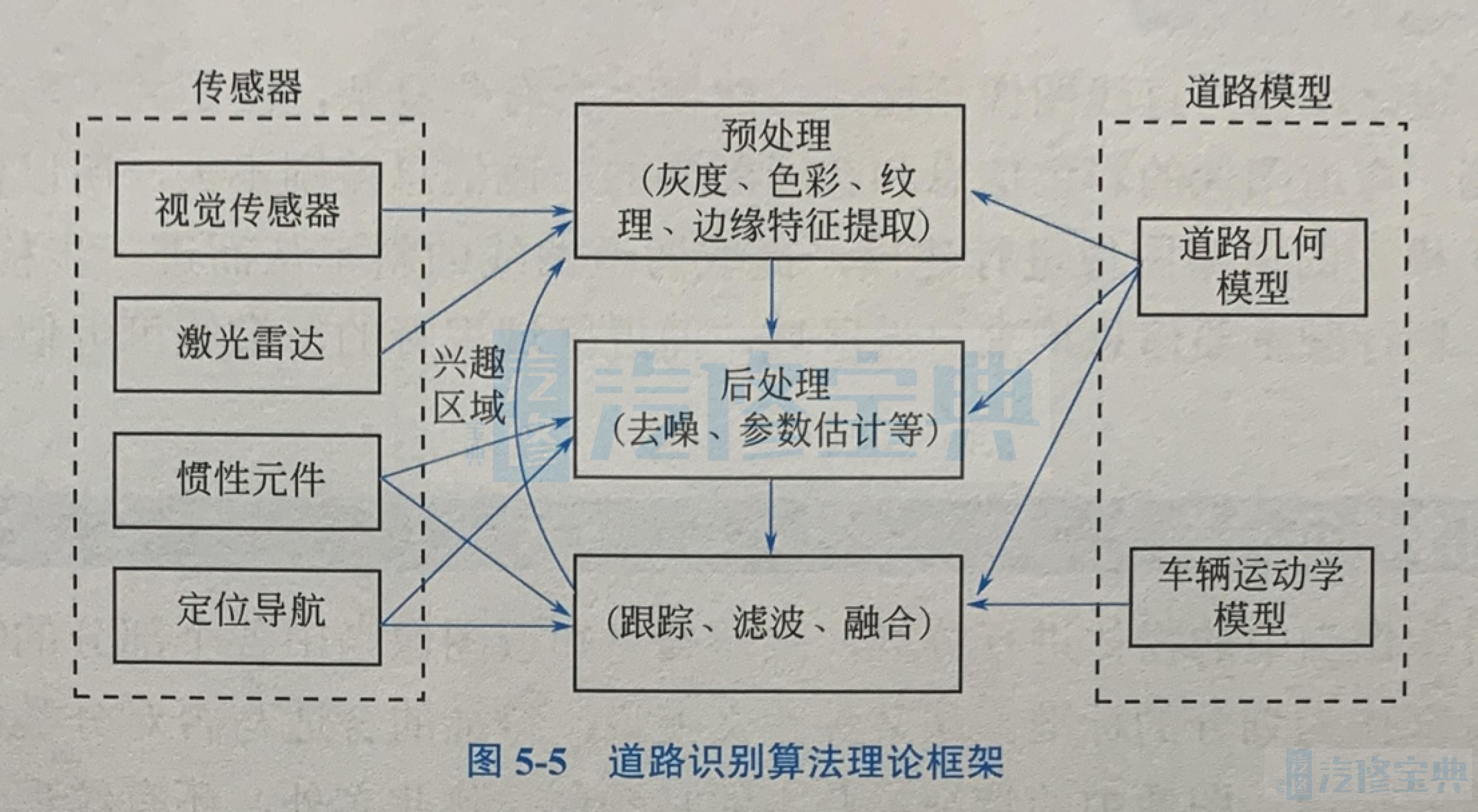
从算法的实现原理来看,虽然方法在实现细节上各不相同,但可以用如图5-5所示的理论框架加以概括。也有部分道路检测方法未使用框架内的方法,如神经网络方法。