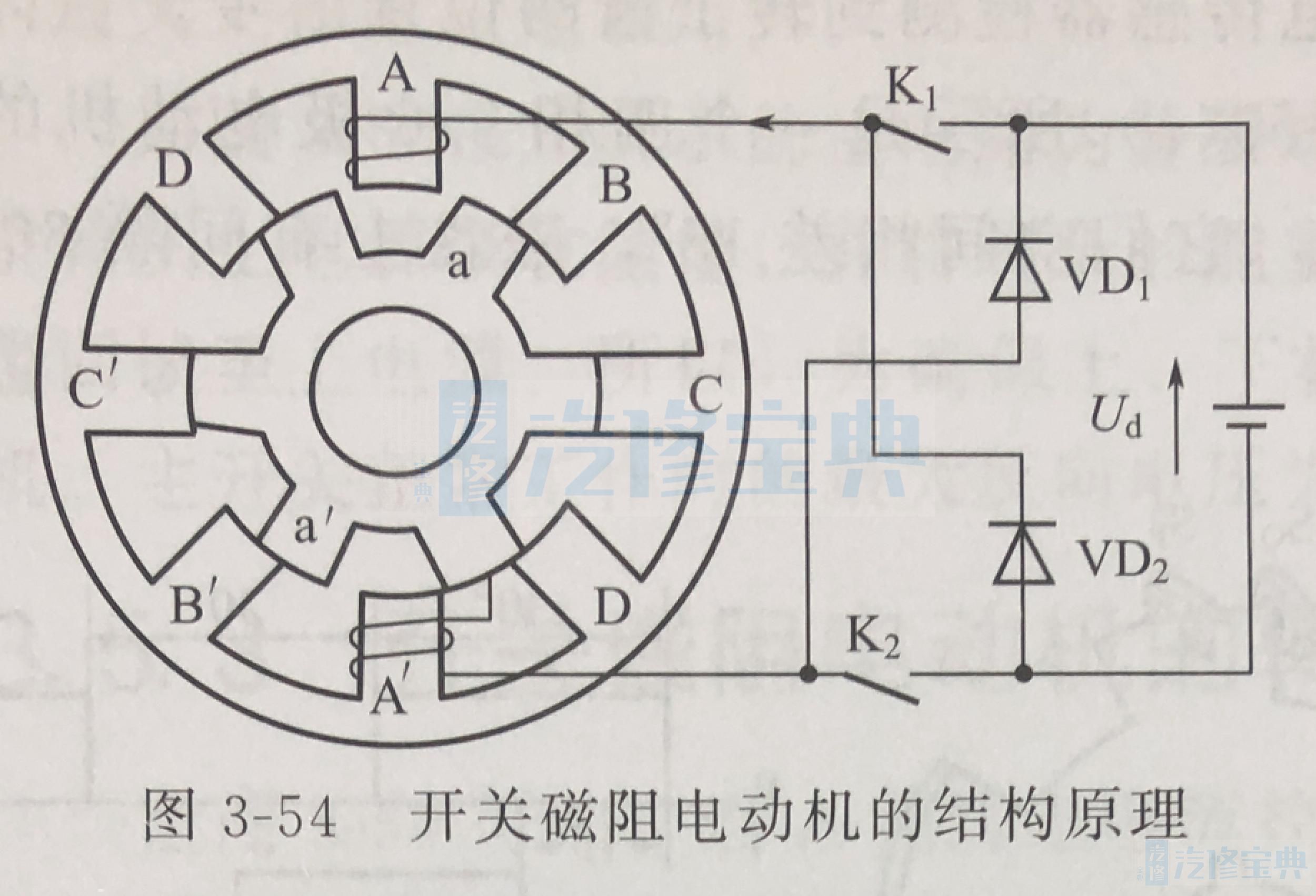
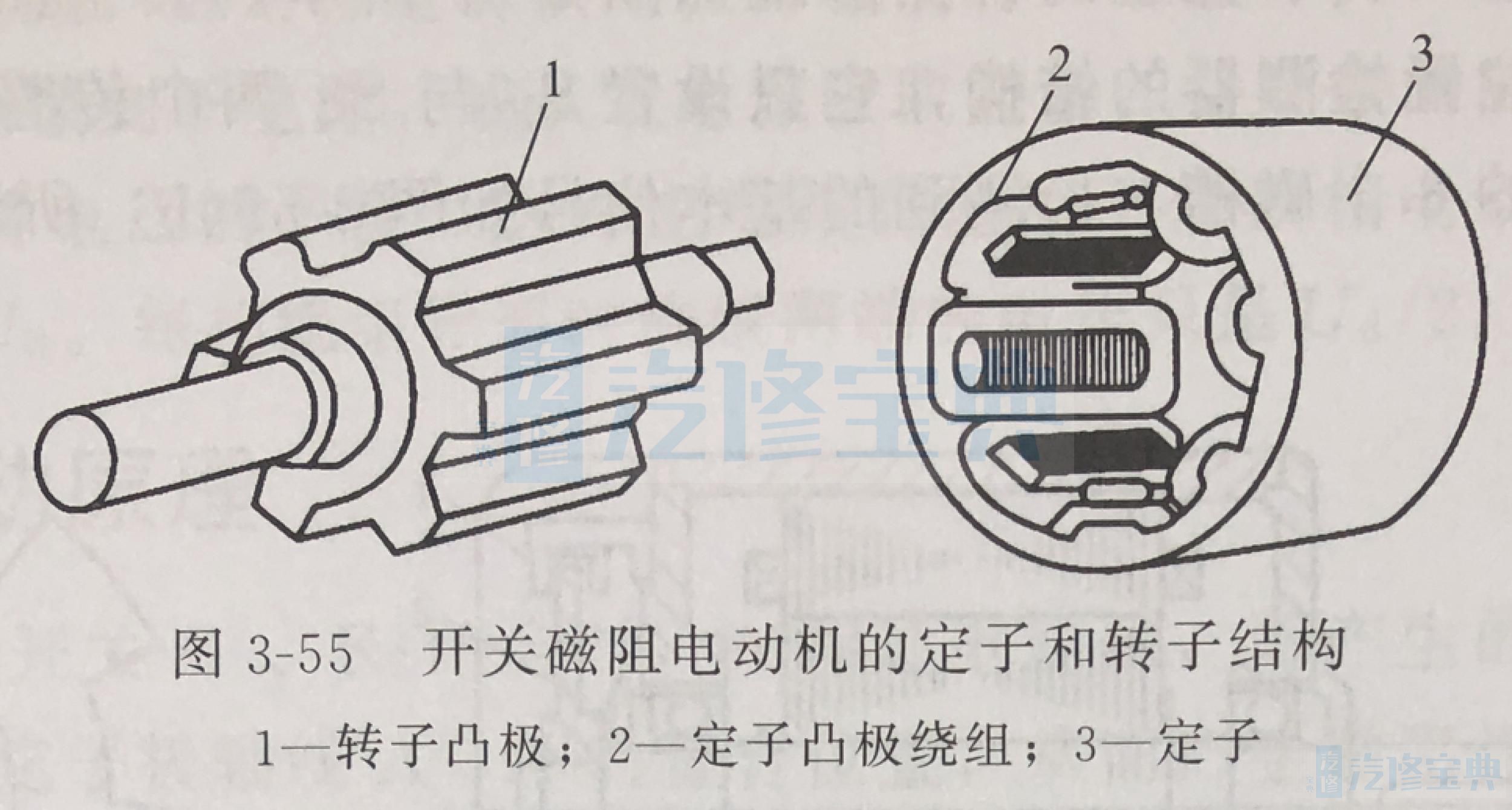
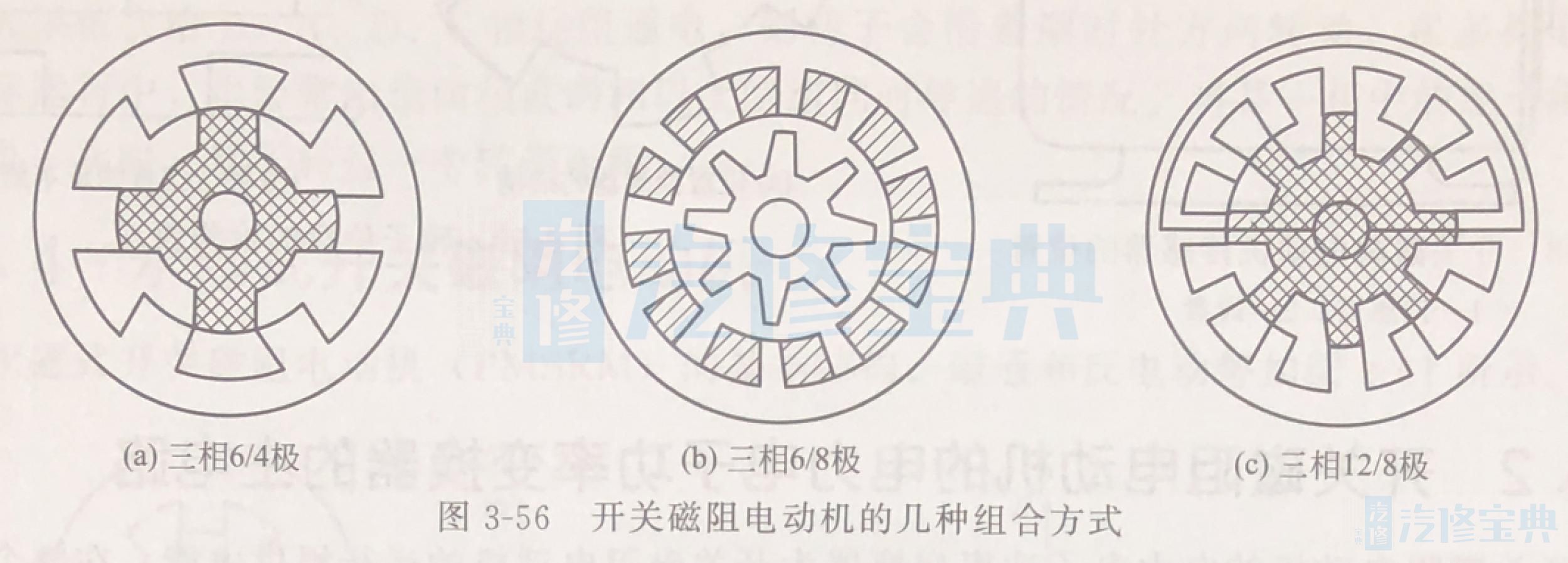
(1)开关磁阻电动机本体开关磁阻电动机本体采用定子、转子双凸极结构,单边励磁,即只有定子凸极采用集中绕组励磁,而转子凸极上既无绕组,也无永磁体;定子、转子都由硅钢片叠压而成;定子绕组径向相对的极串联,构成一相,其结构原理如图3-54所示。 开关磁阻电动机的定子和转子结构如图3-55所示。开关磁阻电动机的定子和转子相数不同,有多种组合方式,最常见的有三相6/4极结构、三相6/8极结构及三相12/8极结构,如图3-56所示。
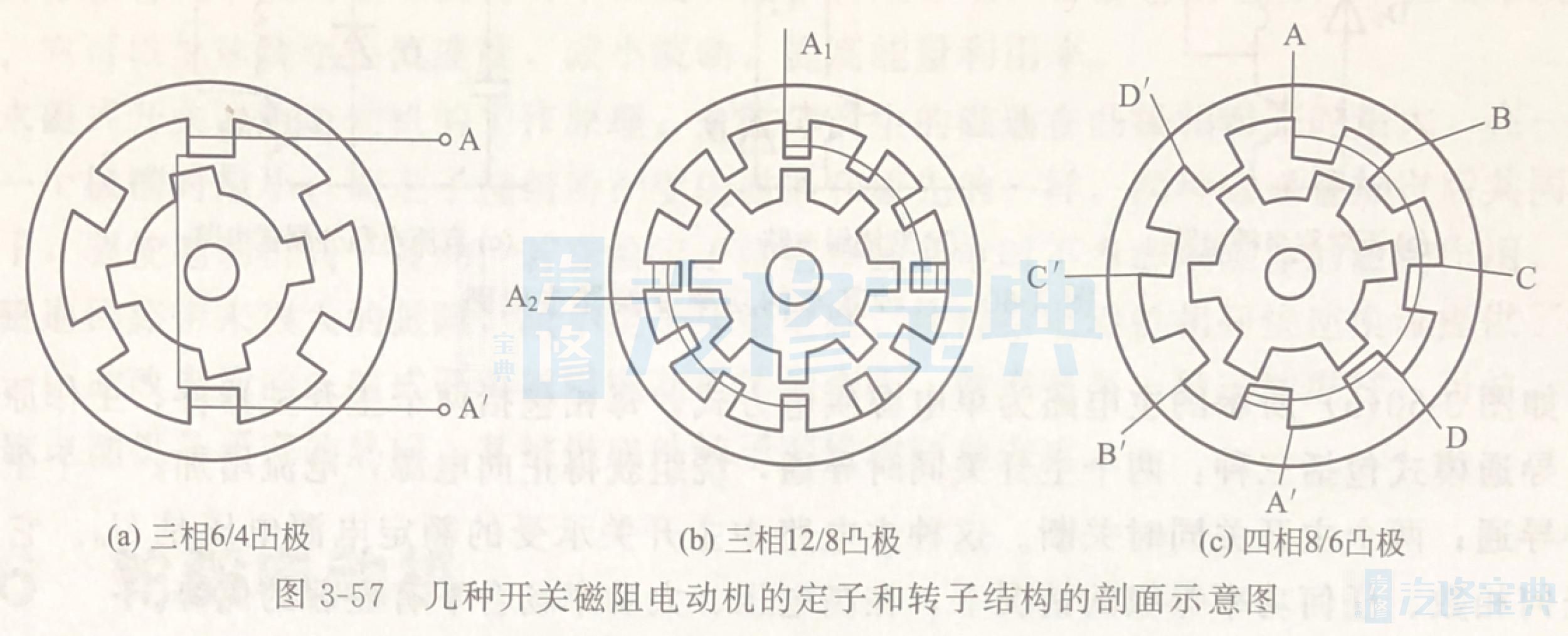
三相6/4极结构表明电动机定子有6个凸极,转子有4个凸极,在定子相对称的两个凸极上的集中绕组互相串联,构成一相,相数=定子凸极数/2。转子上没有绕组,定子上有6个凸极的叫作3相开关磁阻电动机,定子上有8个凸极的叫作4相开关磁阻电动机。相数越多,步进角越小,运转越平稳,越有利于减小转矩波动,但控制越复杂,以致主开关器件增多和成本增加。步进角的计算方法是步进角n=360°×2/(定子极数×转子极数),如四相86极电动机,其步进角a=360°×2/(8×6)=15°。低于三相的开关磁阻电动机通常没有自启动能力。目前应用较多的是三相、四相和五相结构。
如图3-57所示为几种开关磁阻电动机的定子和转子结构的剖面示意图。
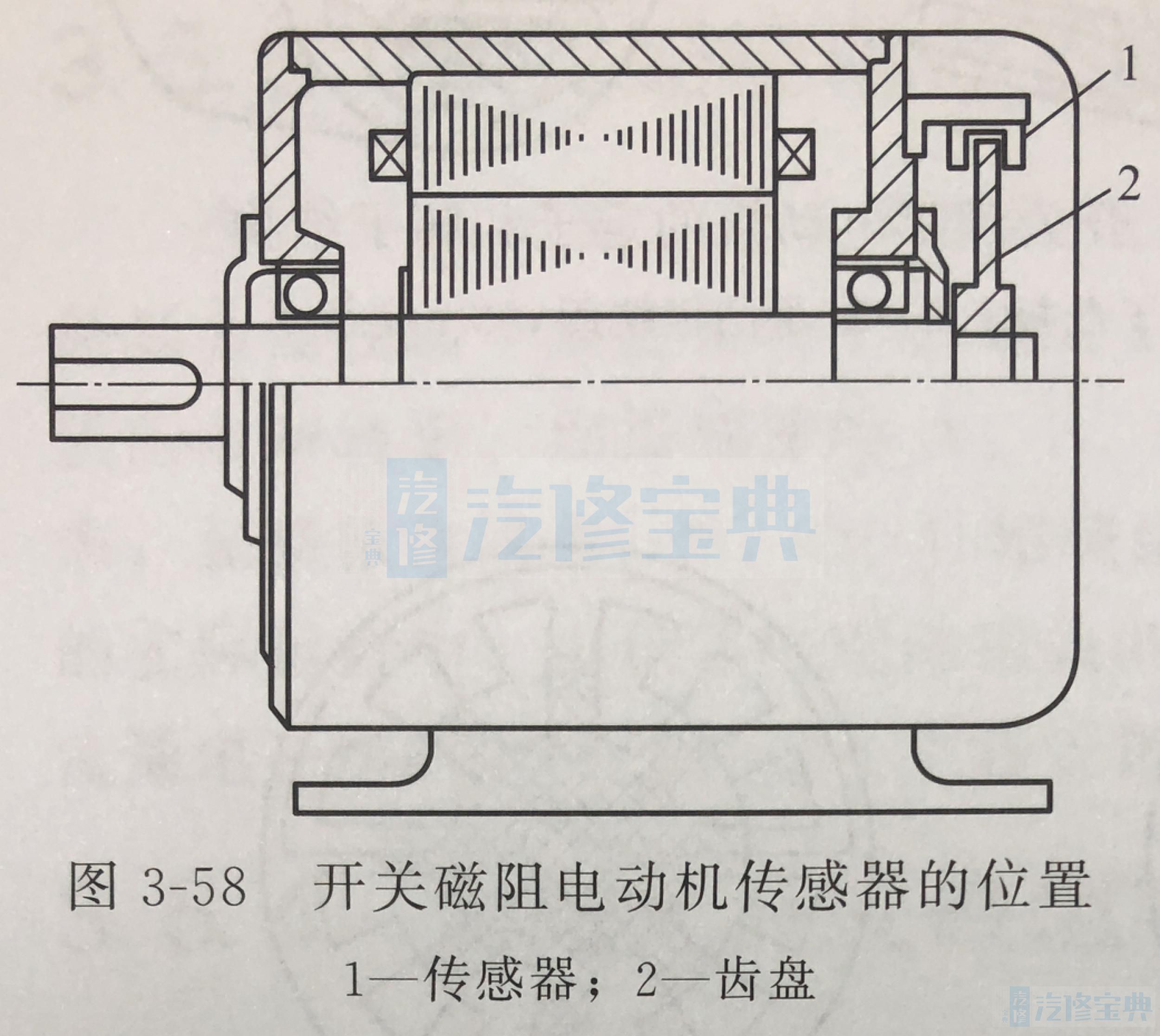
(2)转子位置传感器转子位置传感器包括霍尔式、电磁式、光电式和磁敏式多种,常设置在电动机的非输出端,如图3-58所示为开关磁阻电动机传感器的位置。
光电式位置检测器由齿盘与光电传感器组成。齿盘截面与转子截面相同,装在转子上,光电传感器装在定子上。当磁盘随转子转动时,光电传感器检测到转子齿的位置信号。
转子位置的检测原理如图3-59所示。其中图3-59(a)所示是一个四相8/6极电动机的位置检测器的结构,它只设置Sp与SQ两个传感器,它们空间相差15°,磁盘上有间隔30°的6个磁槽,检测到的基本信号如图3-59(b)所示。