无人驾驶汽车的纵向控制是根据当前道路的曲率、障碍物等情况以及汽车当前的车速、侧向加速度和纵向加速度等状态变量,计算出期望的纵向车速无人驾驶汽车纵向控制,依据的模型主要有侧向加速模型、道路宽度和曲率模型、可容忍误差模型、循迹误差模型、数据拟合模型等
1、侧向加速度模型
2.道路宽度和曲率模型
3.可容忍误差模型
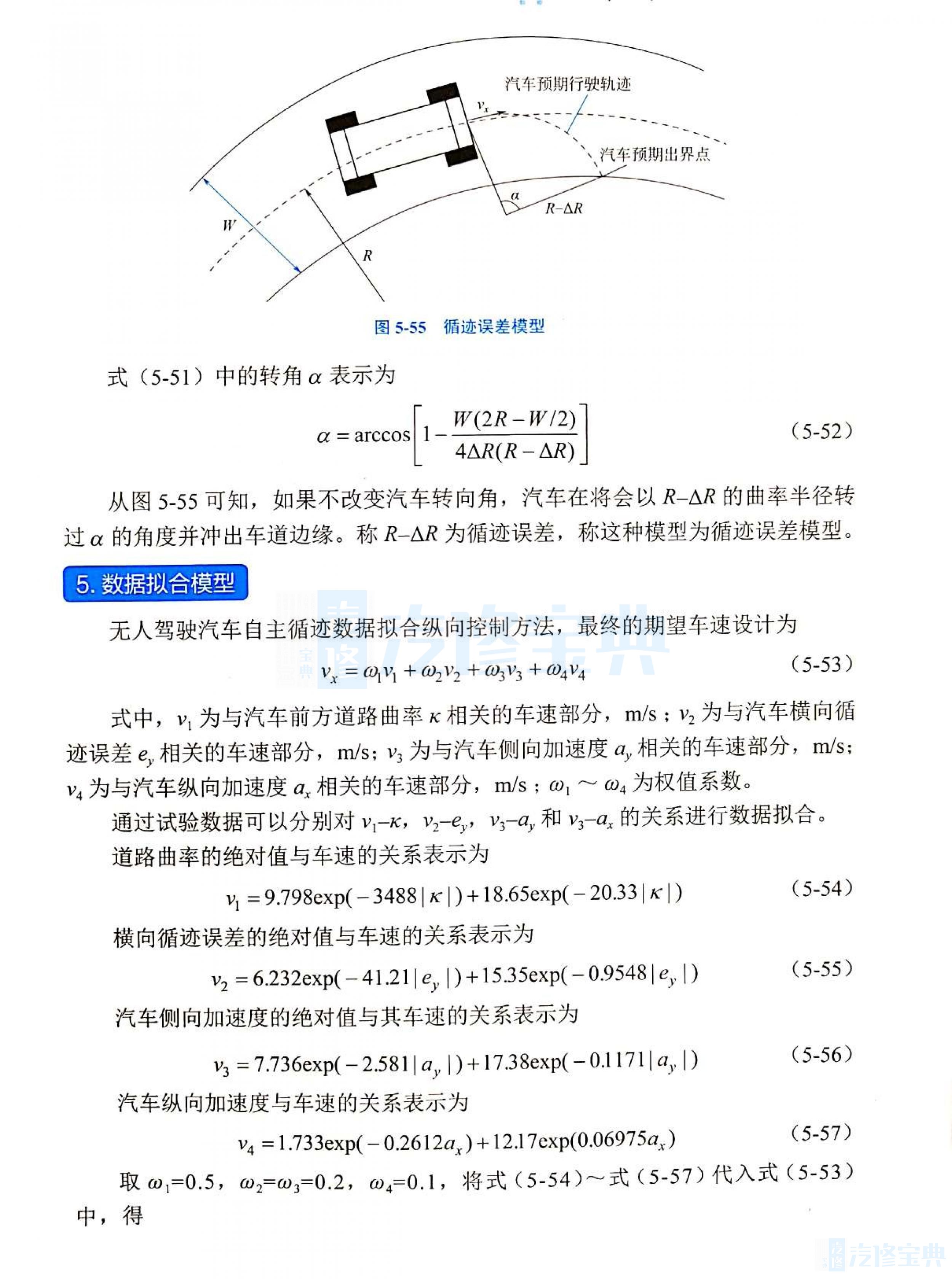
4.循迹误差模型


无人驾驶汽车的纵向控制是根据当前道路的曲率、障碍物等情况以及汽车当前的车速、侧向加速度和纵向加速度等状态变量,计算出期望的纵向车速无人驾驶汽车纵向控制,依据的模型主要有侧向加速模型、道路宽度和曲率模型、可容忍误差模型、循迹误差模型、数据拟合模型等
1、侧向加速度模型
2.道路宽度和曲率模型
3.可容忍误差模型
4.循迹误差模型

返回顶部