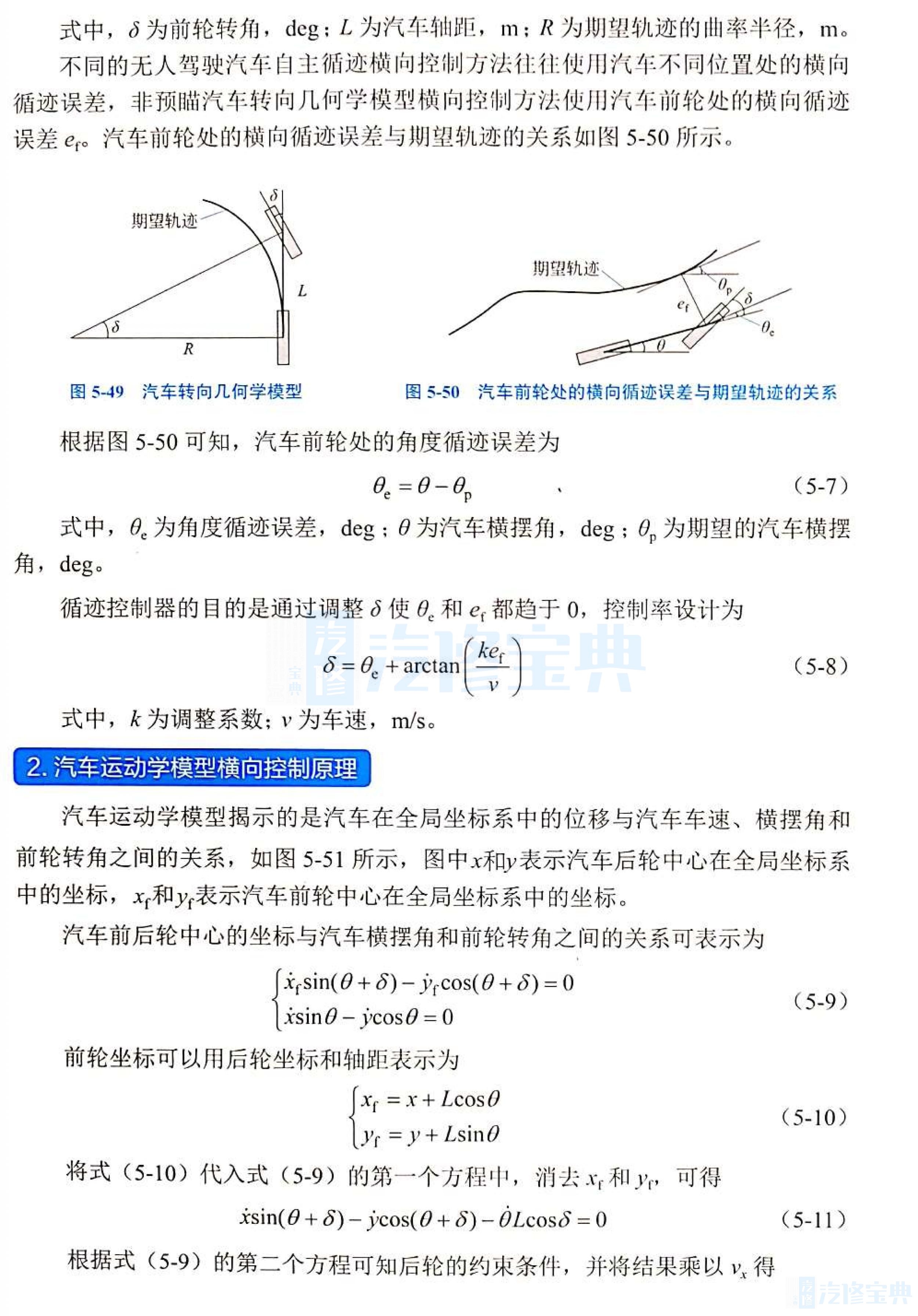
无人驾驶汽车自主循迹横向控制是通过调整汽车的转向盘转角使汽车与期望轨迹之间的横向循迹误差最小,同时使汽车运动方向与期望轨迹切线方向之间的角度误差最小,在保证控制精度的前提下又要兼顾汽车的平顺性和舒适性。 ⒈汽车转向几何学模型橫向控制原理。 汽车转向几何学模型是无人驾驶汽车自主循迹控制中使用最早也是最广泛的汽车模型。 在一系列假设条件下,可以用一个线性二自由度的二轮模型来代替无人驾驶车模型。通常的假设包括,忽略汽车的转向系统,以前轮转角作为转向输入忽略悬架,即忽略汽车的俯仰和侧倾运动:汽车纵向车速视作定值:轮胎处于线性区,汽车侧向加速度限定在0.4g以下:忽略地面切向力对轮胎的影响。此时,汽车前轮转角和后轮将要行驶的轨迹之间满足一个简单的几何学关系,称为汽车转向几何学模型,如图5-49所示。 汽车转向几何学模型的前轮转角与道路轨迹曲率半径之间的关系表示为tanδ=L/R(5-6)
3.汽车动力学模型橫向控制原理。
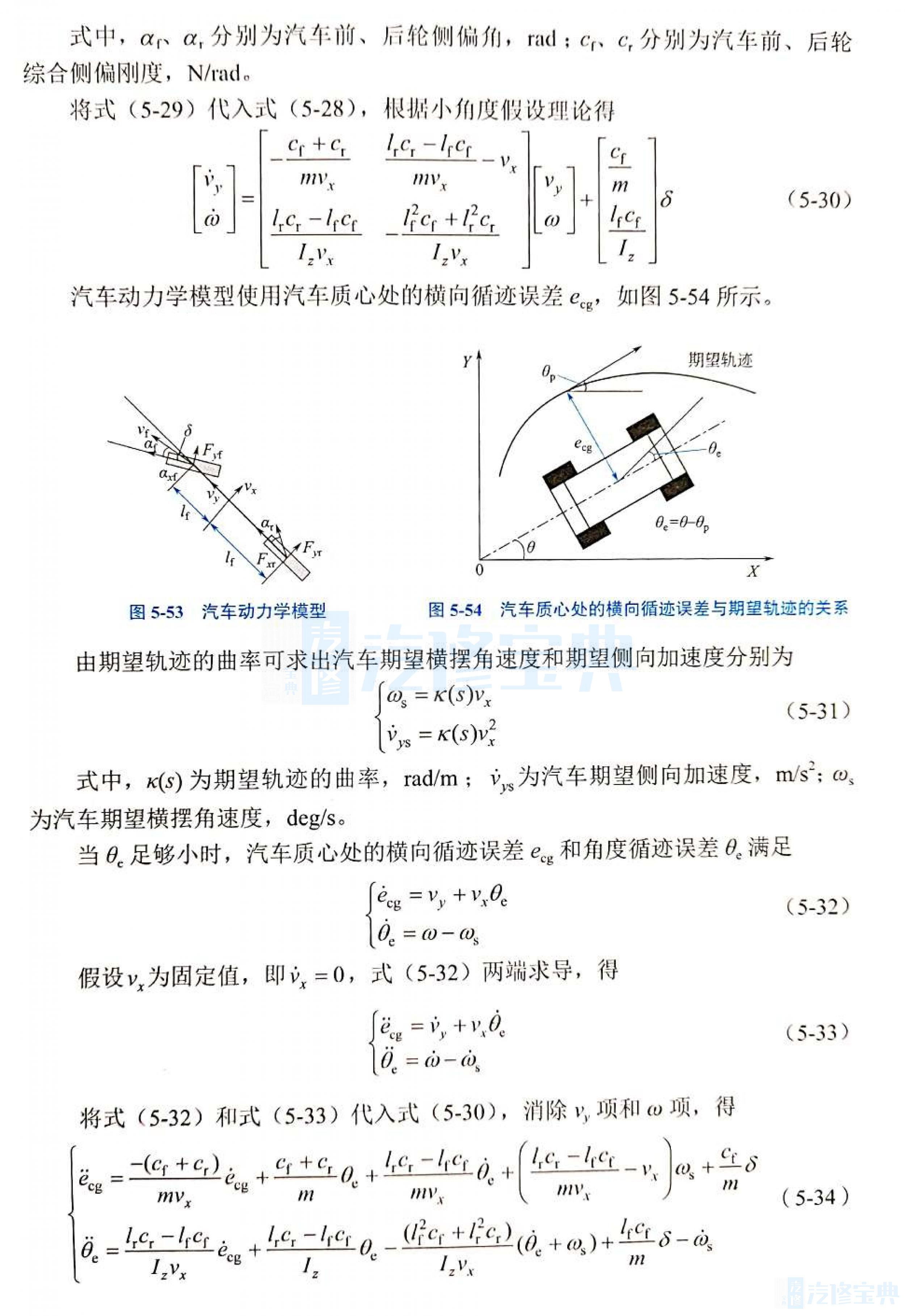
线性二自由度汽车模型同样可以进行汽车的动力学分析。汽车动力学模型表征的是汽车的受力与汽车的速度、加速度以及横摆角之间的关系,如图5-53所示。
将无人驾驶汽车的横向和纵向动力学分开,仅研究无人驾驶汽车自主循迹横向控制,汽车侧向运动和横摆运动的动力学微分方程为。