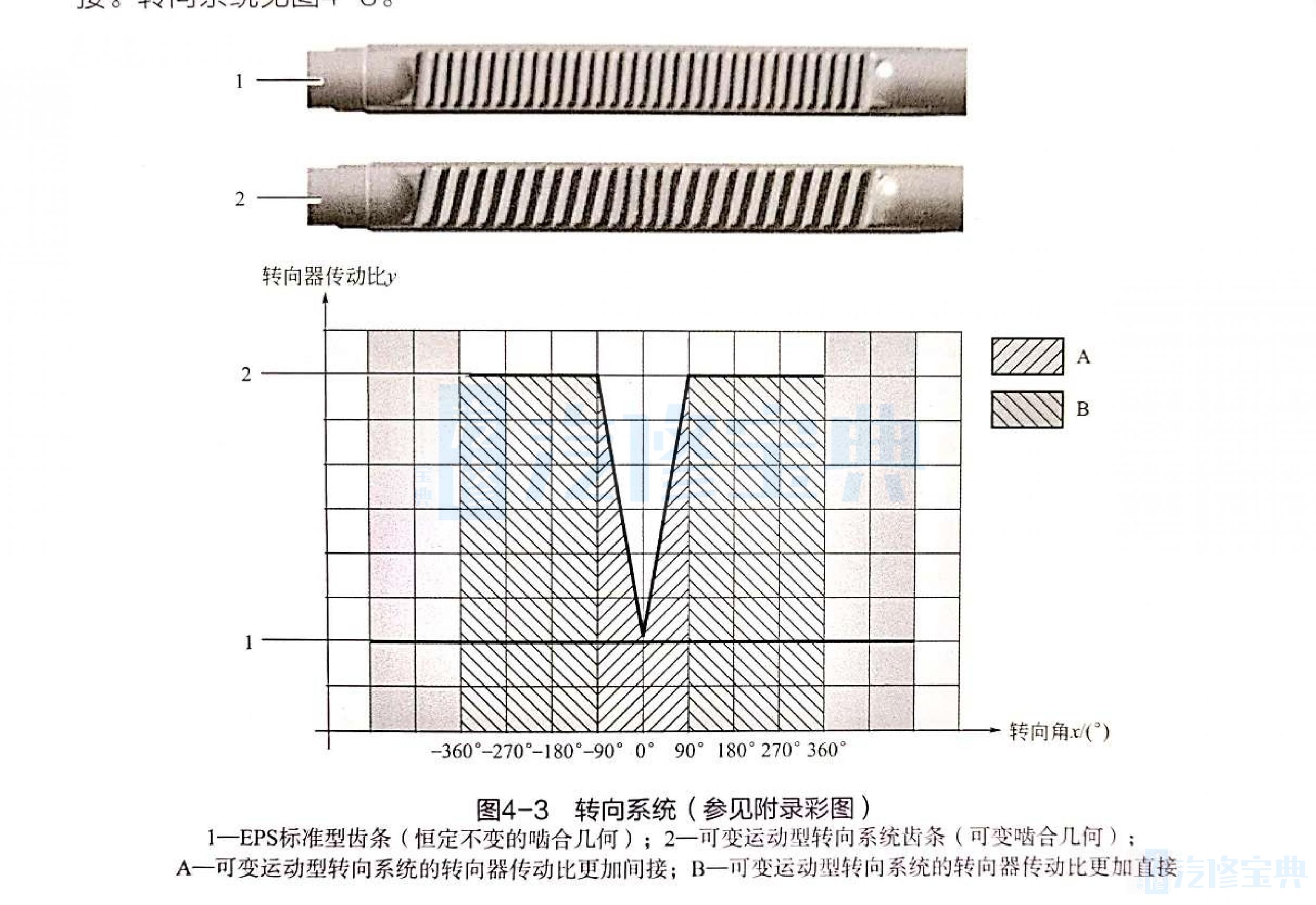
1.概述: 电动机械式助力转向系统(EPS)的转向助力方式有别于传统型液压助力转向机构。 EPS通过伺服电动机而不是通过液压泵给驾驶员提供支持。伺服电动机仅在执行转向运动时激活,因此转向系统在直线行驶时不会消耗功电动机械式助力转向系统具有下列优点: ①驻车时转向力较低。 ②集成车速感应式助力转向系统(电子伺服转向助力)。 ③转向时冲击较低以及方向盘旋转振动较低。 ④方向盘主动复位。 ⑤节约燃油达到1%-2%,因此可降低CO3排放。 ⑥不需要液压油。 电动机械式助力转向系统也可作为内置有电子伺服转向助力的可变运动型转向系统与标准型EPS相比,转向器传动比更加直接,因此所需的转向角更小,这样就使得车辆的反应更加直接,实现很高的灵敏性。例如可在采取避让措施时发挥作用。
通过随行程变化的齿条啮合几何实现可变转向器传动比。当转向器处在中间位置时转向系统能保持稳定直线行驶。当转向角偏离中间位置时,传动比就会逐渐变得更加直接。转向系统见图4-3
2.组成部件:
电动机械式助力转向系统由EPS单元和具有转向阻力矩传感器的机械式转向器构成。以下将描述最为重要的电气部件。
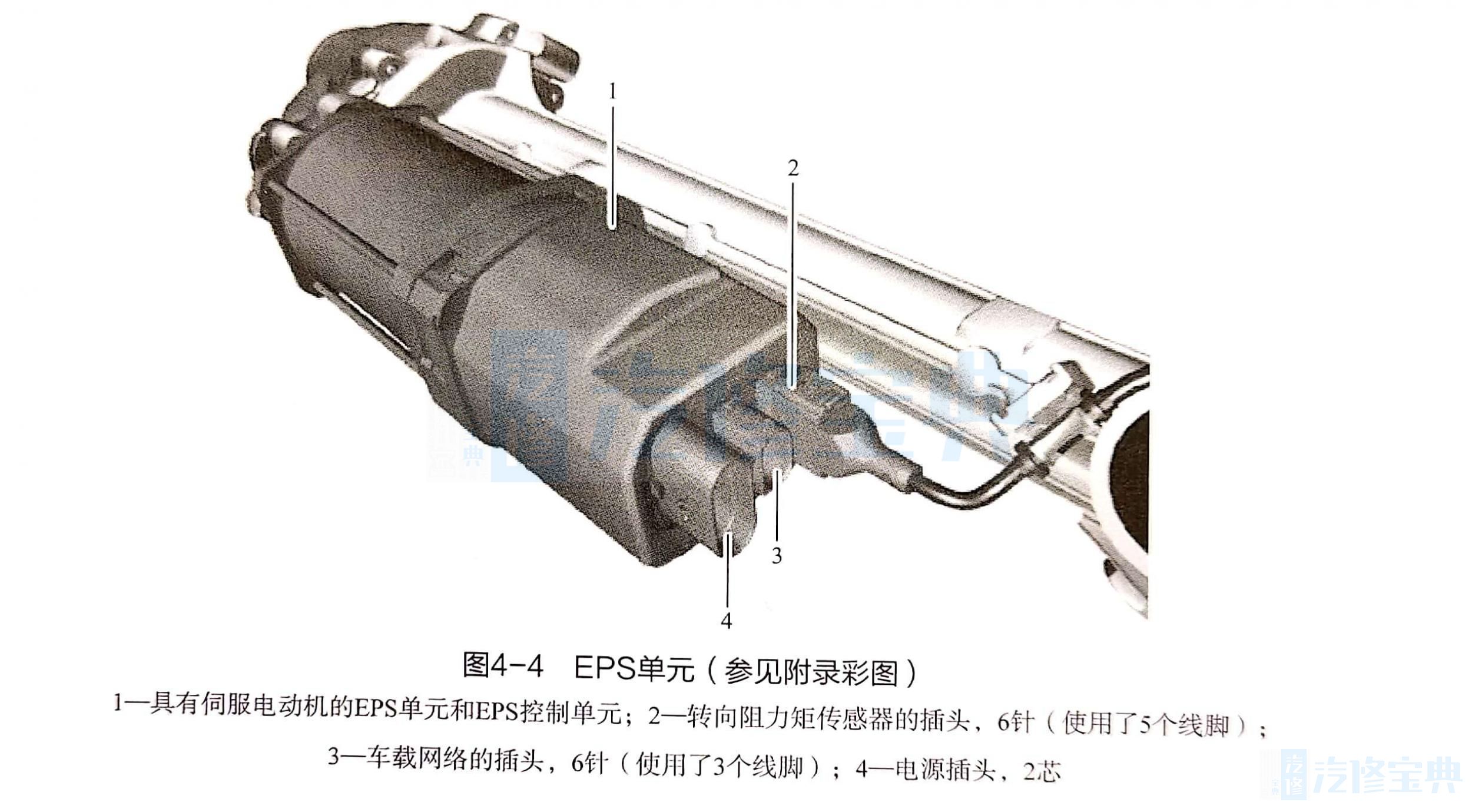
(1)EPS单元 EPS单元由下列部件组成:EPS控制单元;具有电动机位置传感器的伺服电动机。
EPS控制单元是电动机械式助力转向系统中的一个部件。EPS控制单元通过两个插头与车载网络连接。转向阻力矩传感器通过另一个插头与EPS控制单元连接。
在EPS控制单元中存储了多条伺服助力装置、主动式方向盘复位以及减震特性的特性线。根据输入端参数计算出的数值与相应的特性线一起得出必要的转向助力。EPS单元(图4-4)由发动机室配电器通过总线端KL.30供电。乘客侧前部配电器通过总线端15N为EPS控制单元供电。
(2)带电动机位置传感器的伺服电动机此伺服电动机是一个无集流环的同步直流电动机(永久磁铁)。此伺服电动机驱动减速器,于是伺服电动机的功率传递到齿条上。减速器由一个皮带传动机构和一个滚珠丝杠传动机构组成。减速器的传动比大约为2.4。
控制单元电路板上有两个电动机位置传感器(冗余),两个传感器利用霍尔效应原理工作(带凸极转子的霍尔传感器)。磁极转子固定于发动机轴上。电动机位置传感器1可以获知伺服电动机的位置。此传感器提供一个正弦波信号和一个余弦信号,根据这些信号确定转子的位置。电动机位置传感器2用于监控(可信度)。两个传感器都由EPS控制单元供电。
电动机位置传感器同时也作为转向角传感器使用。并非通过EPS从方向盘上的一个独立传感器检测转向角,而是根据EPS单元的电动机转子位置角反算出方向盘的转向角。EPS通过 Flex?将齿条的位置提供给M控制单元。这时EPS将根据伺服电动机的当前转子位置以及从零位置(相当于直线行驶)开始的完整转子旋转圈数算出齿条的绝对位置。
转向角传感器通过专用CAN总线连接于一体式底盘管理系统(ICM)。
ICM控制单元可根据该位置,除了其他参数值之外还利用所保存的参数(相对于方向盘转向角的齿条行程)算出方向盘转向角,并且通过 FlexRay将其发送出去。DSC也可使用该方向盘转向角作为内部调节模式的参考变量。
EPS的齿条绝对值可能会丢失,例如当总线端KL30在编程之后丢失,然后ICM和EPS可以相互作用,通过以下两种不同的方式来测定齿条的绝对位置。
①在大约20km/h以下速度行车期间通过内置的自适应功能自动测定。
②2在停止状态下采用从极限位置到极限位置的转向方式(例如直线行驶位置、左侧极限位置、右侧极限位置、直线行驶位置)。
(3)转向阻力矩传感器转向阻力矩传感器检测驾驶员所施加的转向阻力矩。工作范围为方向盘从极限位置到极限位置转动三圈扭力杆在转向阻力矩作用下扭转,并且将转向阻力矩传递给小齿轮。转向阻力矩传感器的功能基于磁阻原理。为充分使用这种效果,当磁场发生变化时,将得到电阻变化。从磁阻元件中会产生不同的电压信号,将这些信号导入EPS控制单元。通过这些信息EPS控制单元可以计算得到不断升高的转向阻力扭矩。
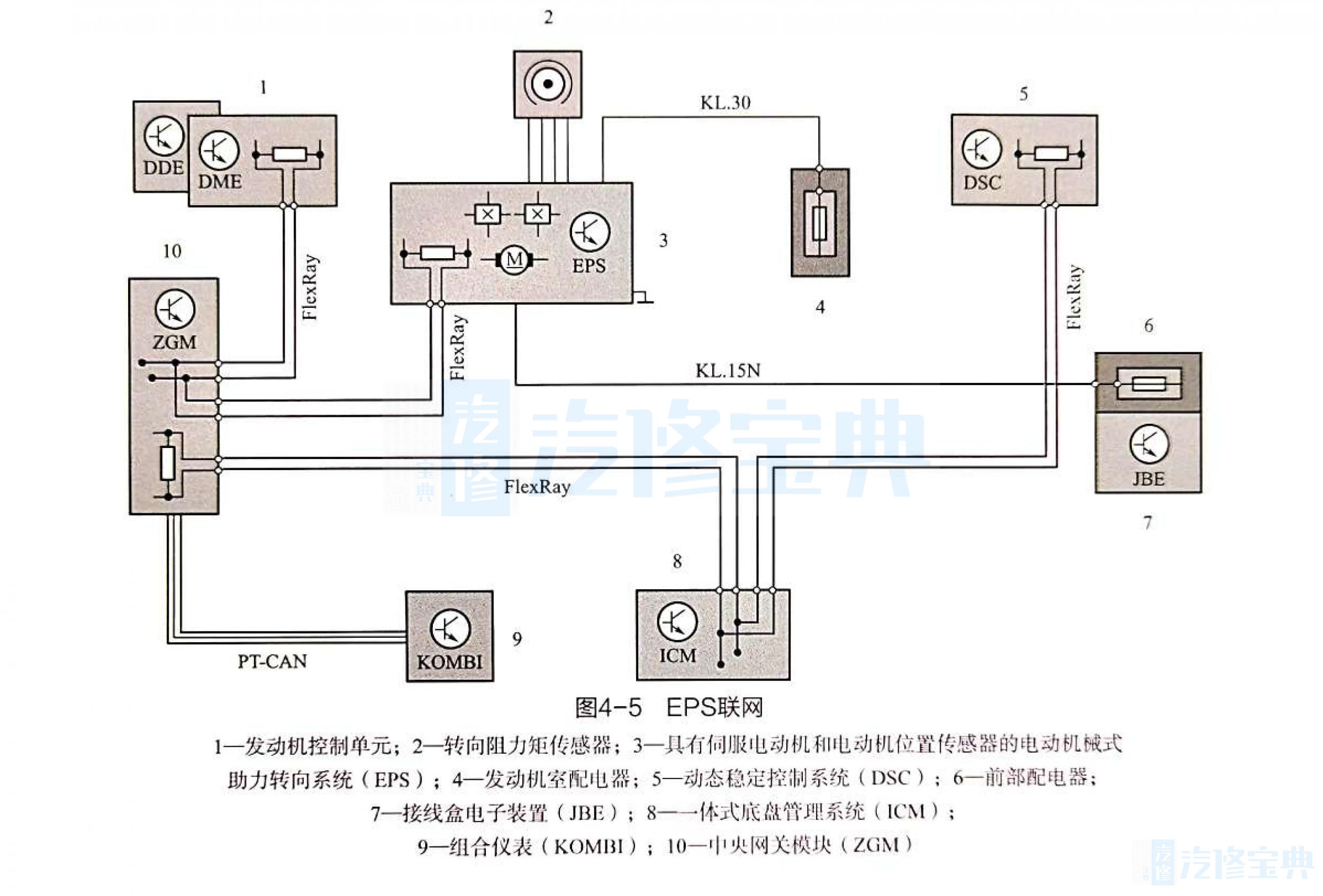
(4)有功能的EPS联网 见图4-5。
(5)一体式底盘管理系统(ICM)ICM控制单元负责集中准备信号,并且在车辆中分配所形成的信号。除了诸如纵向加速度、横向加速度和偏航角速度之类的行驶动态变量之小,还会形成行驶速度作为参考。为此主要使用DSC所提供的车轮转速。可按照运动关系根据EPS算出的齿条绝对位置计算不同的转向角。其中主要包括:
①方向盘上的转向角;
②前桥上的转向角;
③绝对转向角;
将纠正了偏差的所有输出信号发送出去,采用适当的监测措施检查所有输出信号的正确性。例如可利用根据偏航角速度算出的转向角检查转向角的可信度。
在ICM中还整合了其他一些由控制单元负责其数据处理和计算的功能。
(6)发动机控制单元发动机控制单元提供发动机正在运转的信号,需要将其作为转向助力的主要接通条件。这样转向系统的表现就会像常见的液压转向系统一样。
始呈线性降低至极限值(100%)。如果转向助力系统低于40%的值,组合仪表中的检查控制图标就会亮起。如果转向助力系统重新达到100%标称值,检查控制图标就会消失。
(6)过电流识别 FPS通过内部监控程序识别过电流情况。在此使用转向角、转向角速度、行驶速度和驾驶员施加的转向阻力矩等影响参数计算所需的转向功率。如果此时超过允许的负荷极限,则为保护大功率电子装置会减小或完全关闭转向助力。
例如,在以下交通状况下可能出现过电流情况①车辆紧靠路缘停放,然后通过转向过程推开车辆。
②甩尾期间快速反向转向。
(7)作为软件功能的极限位置可通过软件将转向系统的左侧和右侧机械极限位置模拟成为软件功能。可在调试过程中通过程序确定这些软件极限位置,然后将其保存在控制单元之中。
采用该功能可通过到达相应极限位置之前所施加的反向力矩防止机械系统提前磨损。
4.维修说明:
更换转向系统之后,必须利用“调试”服务功能对新的转向系统进行“电气”调整使之适应于转向系统的现有机械系统转向系统试运行。在诊断系统中提供下列服务功能。
(1)试运行利用该服务功能可以将电动机械式助力转向系统的参数复位到制造商的设置,接着重新进行测定。
(2)设码或编程提示EPS包含大量的数据记录。可根据发动机型号及其他边界条件通过设码方式选择数据记录。鉴于这一原因,必须在更换之后(也包括交又调换)对EPS控制单元进行正确设码。
(3)工作条件在下列条件下激活转向助力。
①没有内部控制单元故障;
②点火开关已接通;
③发动机运行;
(4)关闭转向助力的条件①存在内部控制单元故障;
②车辆停止,发动机关闭;
③过电压大于17V;
④4低电压小于9V。