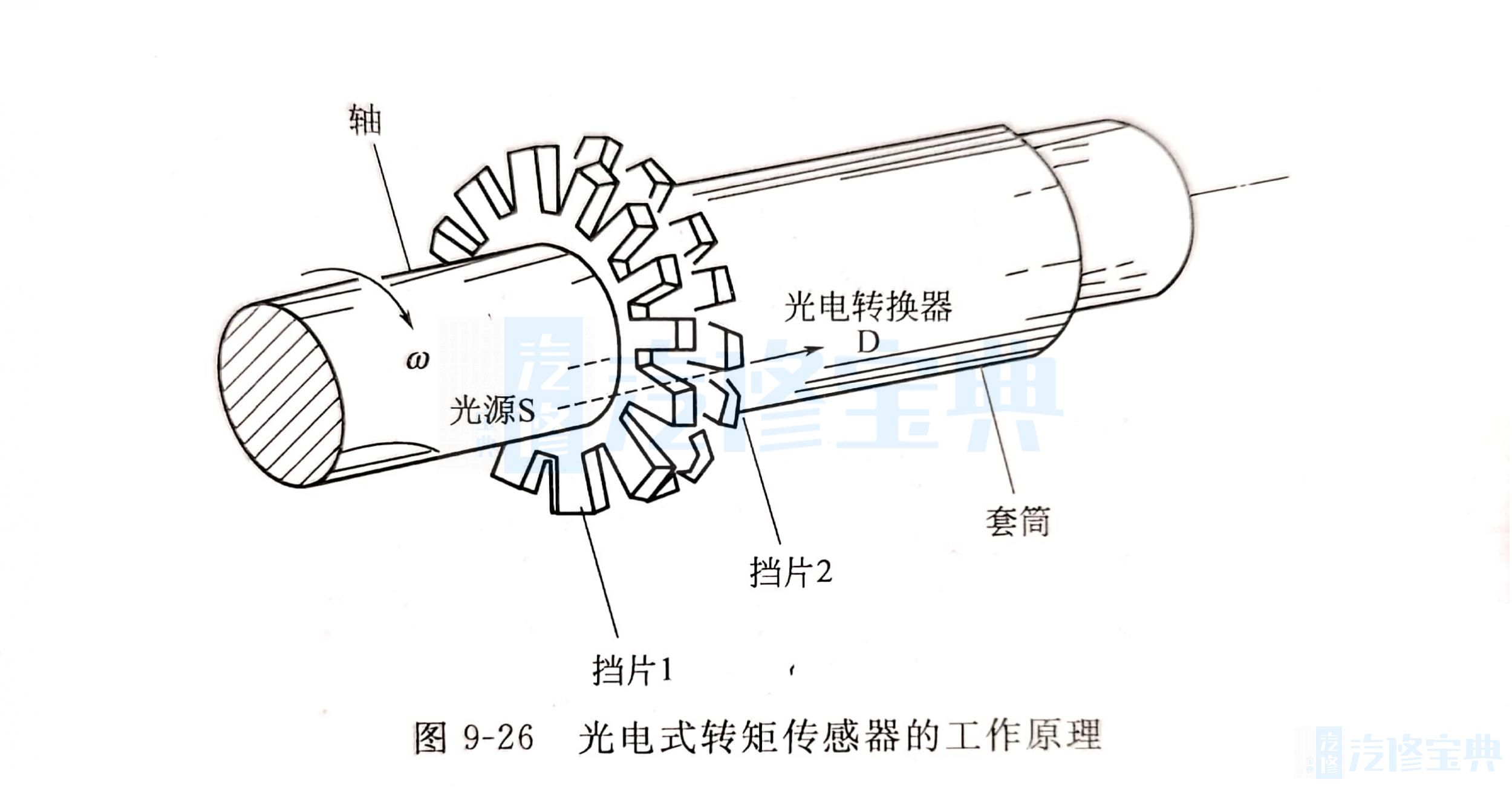
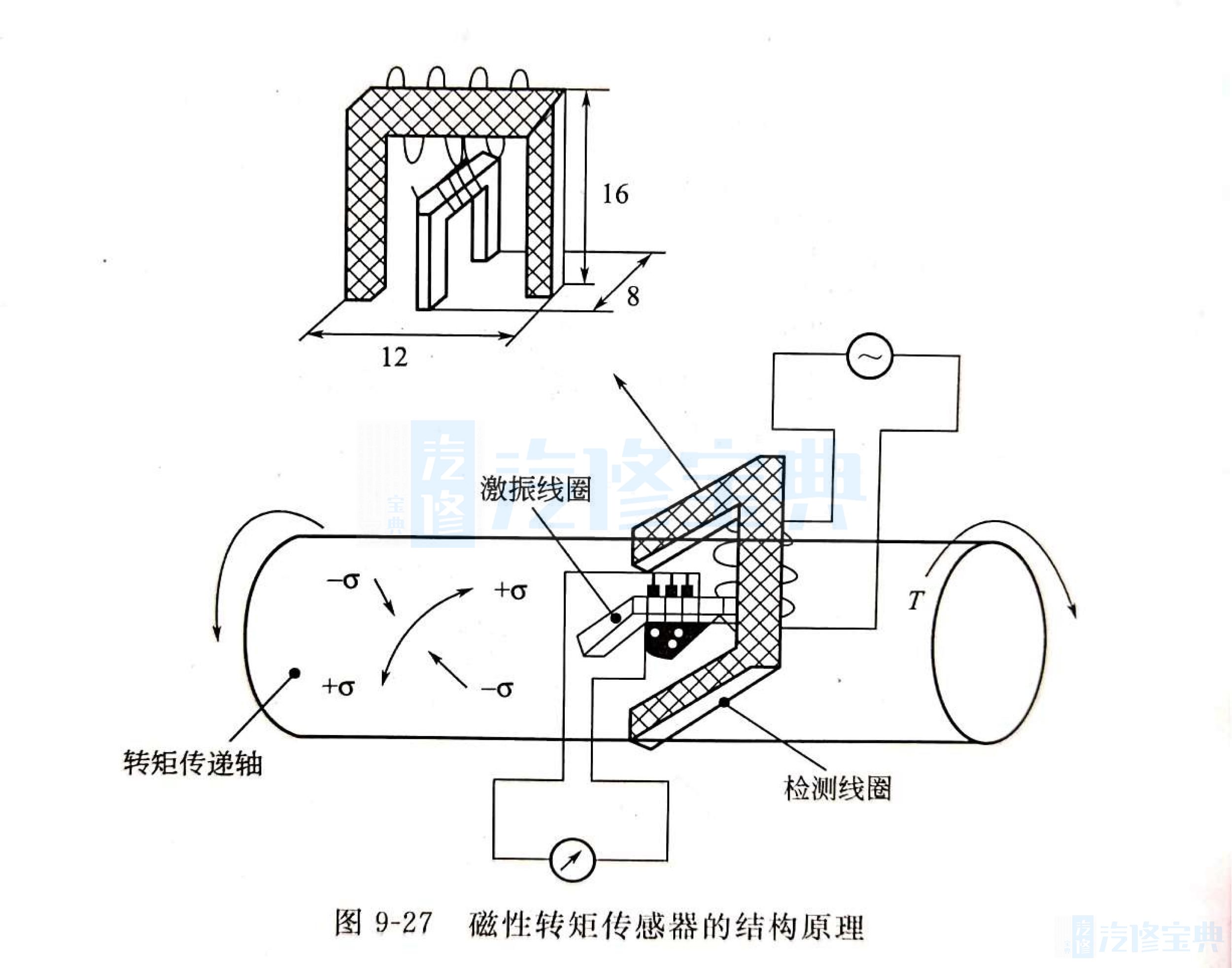
一、光电式转矩传感器。 光电式转矩传感器是利用光电转换原理制成的,它具有很高的精确度和可靠性,其工作原理如图9-26所示。光线从光源S沿平行轴线方向射出,通过横置于当中的一对挡片槽缝到达光电转换器D。由此可见,光电转换器D所接收到的光线强度是由槽缝重叠的程度所决定的。两槽缝挡片之间用弹性连接,当施以扭力时,挡片1与挡片2重叠,转矩越小,重叠越少,从槽缝通过的光线越多,而光电转换器输出的电压越高,反之,则电压越低。当电压输入给ECU后,就可实现对转矩的自动控制。 二、磁性转矩传感器。 磁致伸缩特性是指当材料承受负荷引致机械应力时,铁磁体的磁导率会发生变化。磁性转矩传感器就是利用铁磁体的磁致伸缩特性制成的。磁性转矩传感器通过电路的连接转化为
电压信号输出,通过测量导磁率的变化,即可求得转矩。当发动机曲轴受到扭应力时,会引起传感器中的铁磁体的导磁率的变化,利用这一变化可实现对其转矩的测量,如图9-27所示。
三、扭杆扭矩传感器。
1.扭杆扭矩传感器的结构。
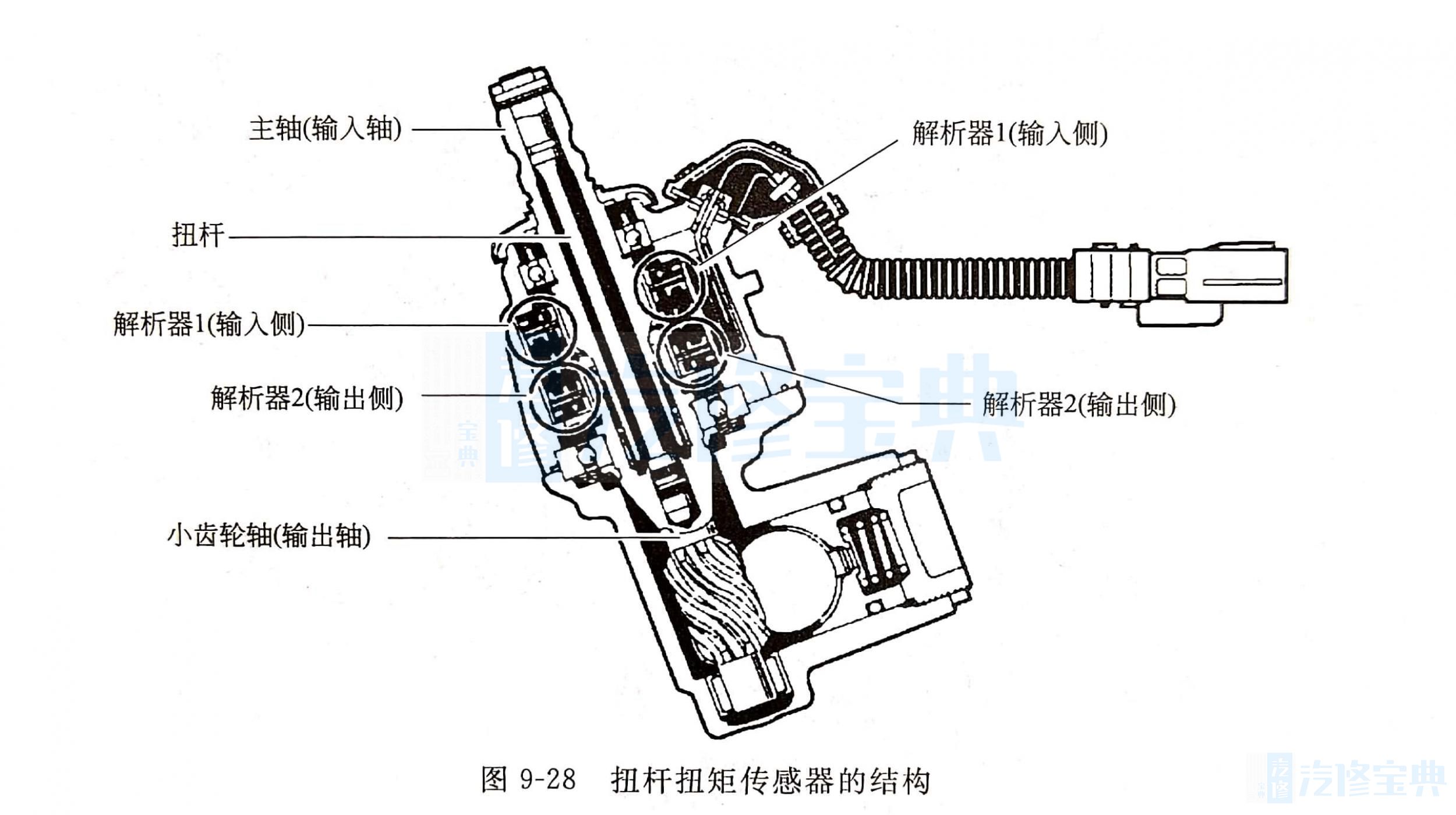
扭杆扭矩传感器由主轴(输入轴)、扭杆、2个解析器和小齿轮轴(输出轴)组成。其结构如图9-28所示。传感器的2个解析器分别安装在主轴(输入轴)和小齿轮轴(输出轴)上,而主轴和小齿轮轴与扭杆耦合在一起。该结构产生相对角度差异(等于扭杆的扭转量)。
驾驶员转动方向盘时,会产生主轴(输人轴)传输至解析器1(输入侧)的角度与小齿轮轴(输出轴)传输到解析器2(输出侧)的角度之间的差异。
2.扭杆扭矩传感器的工作原理。
(1)直行时。
如果车辆直线行驶且驾驶员没有转动方向盘,则动力转向ECU总成判定此时输出规定电压,以指示方向盘位于中间位置。因此,无电流施加至动力转向马达。
(2)转向时。
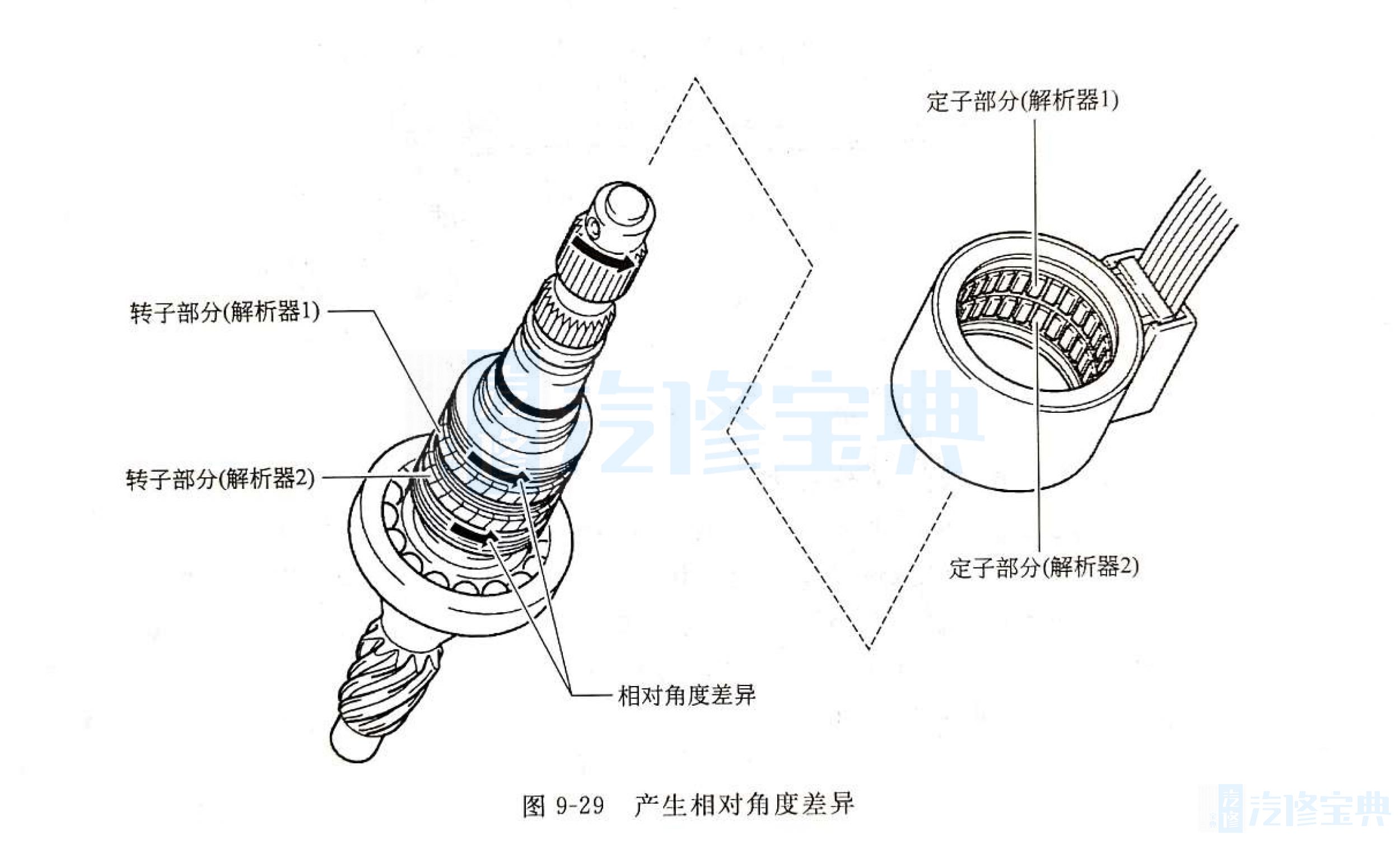
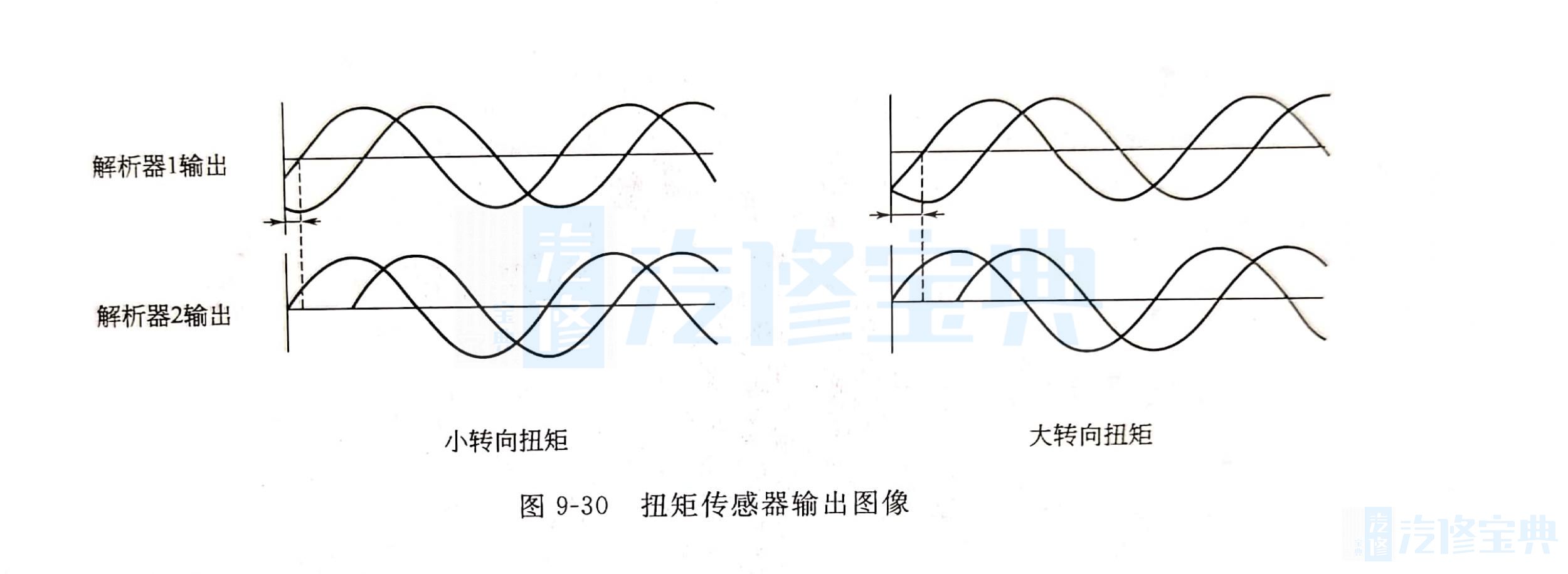
驾驶员转动方向盘时,解析器1和解析器2的转子部分之间产生相对角度差异,仅与扭杆的扭转量相等,如图9-29所示。解析器1和解析器2的定子部分以电信号形式接收转子角度并将其输出至动力转向ECU总成,扭矩传感器输出图像如图9-30所示。根据这些输入信号,动力转向ECU总成计算2个解析器检测到的角度之间的相对差异。动力转向ECU总成根据此差异来计算扭矩值。然后,动力转向ECU总成根据计算的扭矩值和车速来计算辅助电流。根据从转角传感器获得的信息,动力转向ECU总成以预定电流驱动动力转向马达。